Clear Sky Science · pl
Cluster Haptic Texture Dataset: Zestaw danych dotykowych z różnymi prędkościami i kierunkami przesuwania
Dlaczego dane dotykowe mają znaczenie dla twojego cyfrowego życia
Telefony, które przypominają w dotyku tkaninę, rzeczywistość wirtualna pozwalająca wyczuć słojowanie drewna oraz roboty potrafiące odróżnić skórę od szkła — wszystkie te osiągnięcia opierają się na jednym: dobrych danych o dotyku. Podczas gdy kamery i mikrofony dysponują ogromnymi publicznymi zbiorami do nauki, nasz zmysł dotyku brakował takich starannie zebranych odniesień. W tym artykule przedstawiono nowy zestaw danych, który wypełnia tę lukę, dając badaczom i inżynierom szczegółową bibliotekę tego, jak różne powierzchnie odczuwane są, gdy opuszek palca porusza się po nich na rozmaite sposoby.
Biblioteka rzeczywistych powierzchni
Zespół skonstruował to, co nazwali Cluster Haptic Texture Dataset — kolekcję nagrań z 118 codziennych materiałów. Wśród nich są drewno, kamień, szkło, metal, tworzywa sztuczne, tkaniny, ceramika, kompozyty i różne skóry. Zamiast polegać na ochotnikach eksplorujących powierzchnie w ich własnym stylu, badacze użyli sztucznego opuszkа palca wykonanego z miękkiej gumy. Ten opuszek był przyciskany i przesuwany po każdej powierzchni w ściśle kontrolowanych warunkach, by uzyskane dane można było rzetelnie porównać między materiałami i wzorcami ruchu.
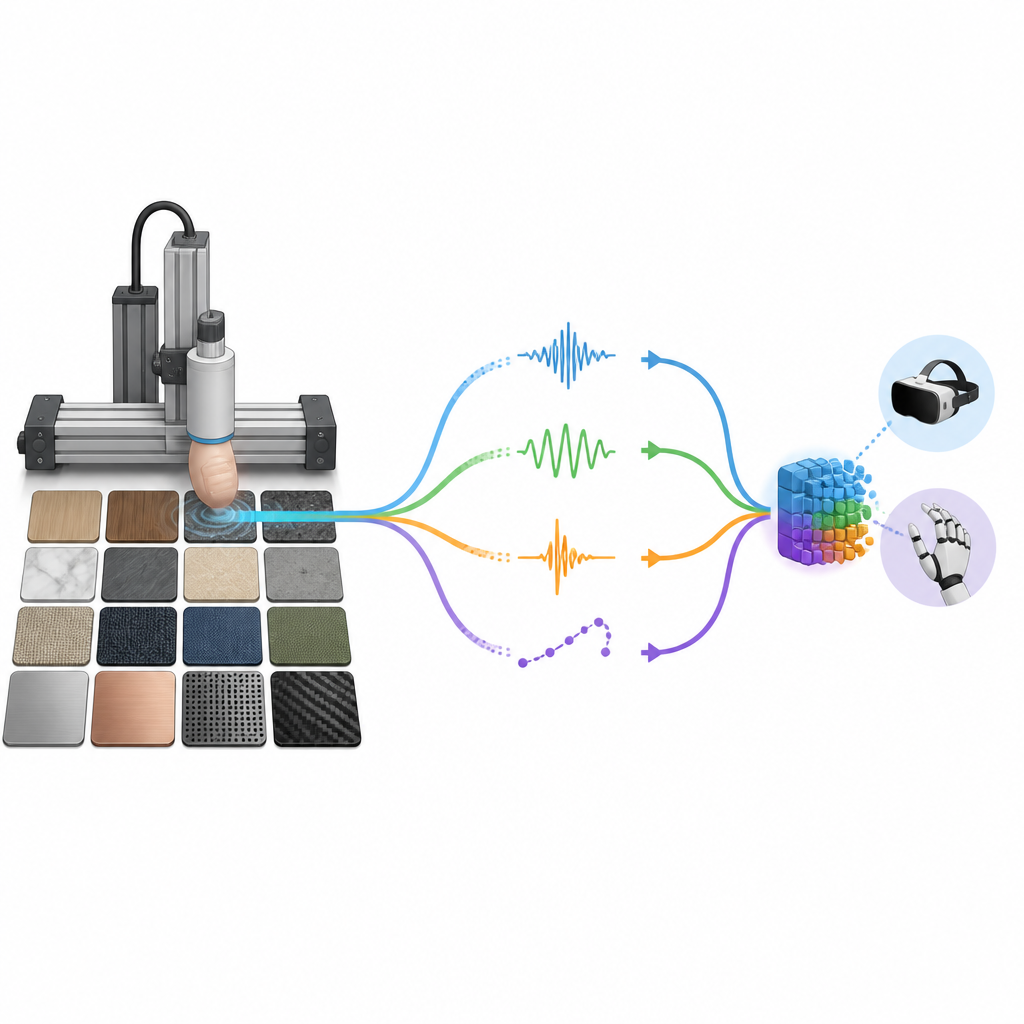
Robotyczny palec, który słucha i czuje
Aby zebrać dane, badacze zmodyfikowali trójosiową drukarkę 3D, tak by mogła poruszać gumowym opuszkem z dużą precyzją. Gdy końcówka przesuwała się po powierzchni, mikrofony rejestrowały drobne dźwięki, akcelerometr śledził drgania, celka pomiarowa mierzyła siłę kontaktu, a maszyna logowała pozycję opuszka. Pomiary wykonywano w komorze dźwiękoszczelnej, a zespół zastosował następnie aktywną redukcję szumów, by usunąć brzęczenie maszyny. Dla każdego materiału testowano pięć prędkości przesuwu, osiem kierunków i dwa poziomy siły, powtarzając każdy przypadek dwukrotnie. Dało to 160 warunków ruchu na powierzchnię i w sumie 18 880 zsynchronizowanych nagrań, wraz z obrazami o wysokiej rozdzielczości i pomiarami tarcia.
Od surowego dotyku do użytecznych sygnałów
Zbieranie danych to tylko część pracy. Autorzy musieli też pokazać, że zawierają wzorce, które komputery potrafią się nauczyć rozpoznawać. Przekształcili nagrania dźwięku i drgań w kolorowe mapy czas–częstotliwość i trenowali różne typy algorytmów do rozpoznawania tekstur, prędkości i kierunków. Modele głębokiego uczenia oparte na konwolucyjnych sieciach neuronowych sprawdziły się szczególnie dobrze, poprawnie identyfikując typ powierzchni w około 96 procent przypadków, gdy otrzymały zarówno dźwięk, jak i drgania. Szacunek prędkości był prawidłowy w około 89 procentach, a kierunku w około 79 procentach, co pokazuje, że nagrania zachowują bogate wskazówki o ruchu opuszka.
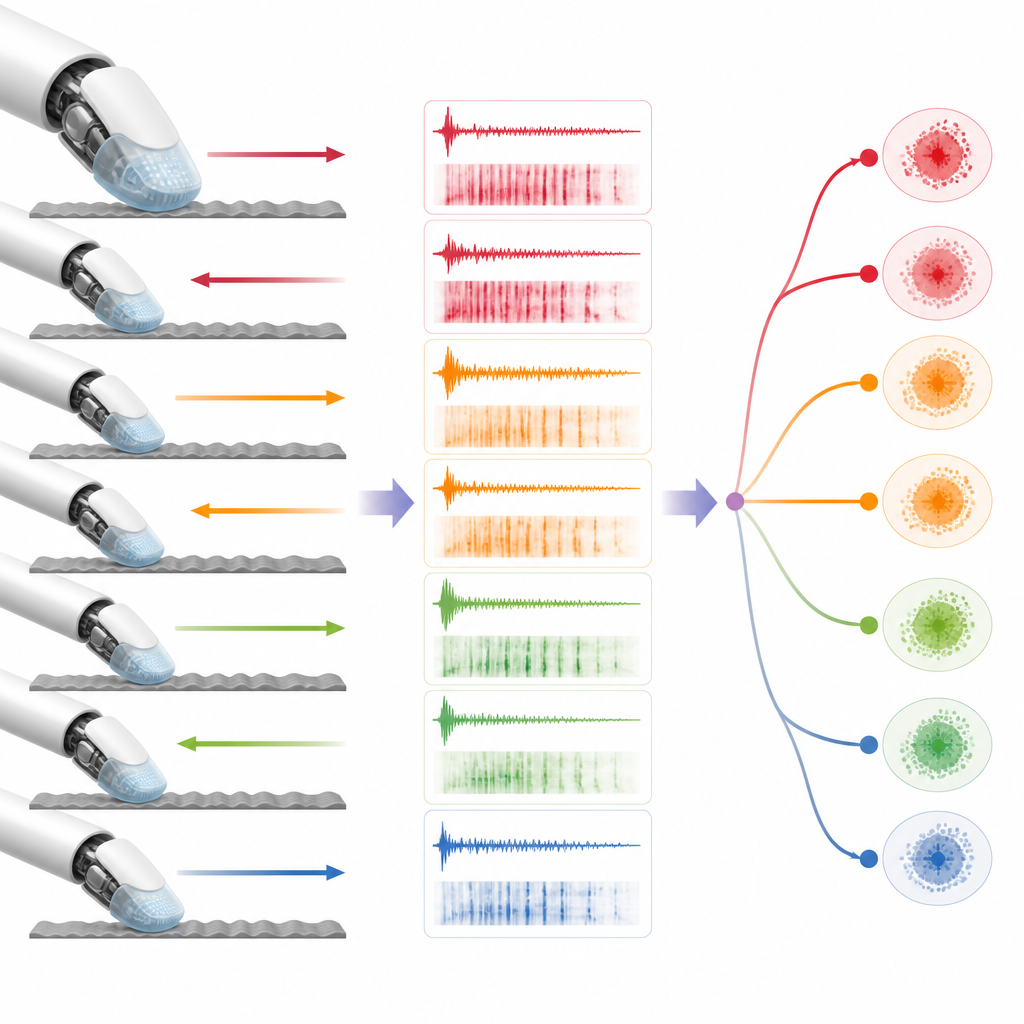
Co zmienia się wraz z prędkością i kierunkiem
Zestaw danych pozwolił zespołowi zbadać, jak właściwości materiałów wpływają na to, co rejestrują czujniki dotyku. Gładkie, o niskim tarciu próbki, takie jak niektóre rodzaje drewna, metale i tworzywa, generowały sygnały czujników zmieniające się w uporządkowany sposób wraz ze zmianą prędkości, co prowadziło do bardzo dokładnego rozpoznawania prędkości. Natomiast miękkie lub nieregularne powierzchnie, jak gaza czy niektóre skóry, tworzyły bardziej chaotyczne sygnały, przez co szacunek prędkości był trudniejszy. Jeśli chodzi o kierunek, powierzchnie o wyraźnym usłojeniu lub wzorach liniowych dawały najczystsze wyniki, ponieważ przesuwanie w poprzek lub wzdłuż włókien generowało bardzo różne wzorce drgań i dźwięków. Materiały o puszystej lub odkształcalnej strukturze miały tendencję do zacierania tych różnic.
Co to znaczy dla przyszłej technologii dotyku
Dla osób niebędących ekspertami kluczowy przekaz jest taki: mamy teraz publiczną, dobrze zorganizowaną bibliotekę danych dotykowych, łączącą wygląd z tym, jak coś brzmi i jak się odczuwa pod różnymi wzorcami ruchu. To źródło powinno ułatwić projektowanie telefonów, kontrolerów i systemów wirtualnej rzeczywistości, które reagują realistycznie po przesunięciu lub stuknięciu, oraz trenowanie robotów, które potrafią ocenić materiały dotykiem. Ponieważ badacze na całym świecie mogą pobrać zestaw danych i powiązany kod, mogą sprawiedliwie porównywać metody i rozwijać prace innych, podobnie jak zbiory obrazów przyczyniły się do rozwoju wizji komputerowej.
Cytowanie: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Słowa kluczowe: zestaw danych tekstur dotykowych, czujność dotykowa, haptyka w rzeczywistości wirtualnej, dotyk robota, uczenie maszynowe multimodalne