Clear Sky Science · de
Cluster-Haptik-Texturdatensatz: Haptischer Texturdatensatz mit variierenden Gleitgeschwindigkeits- und Richtungs-Kontakten
Warum Tachdaten für Ihr digitales Leben wichtig sind
Telefone, die sich wie Stoff anfühlen, virtuelle Realität, die Sie Holzmaserung spüren lässt, und Roboter, die Leder von Glas unterscheiden können — all das beruht auf einer Sache: guten Daten über den Tastsinn. Während Kameras und Mikrofone große öffentliche Datensätze zum Lernen haben, fehlte unserem Tastsinn lange ein vergleichbar sorgfältig erstelltes Referenzmaterial. Dieses Paper stellt einen neuen Datensatz vor, der diese Lücke schließt und Wissenschaftlern sowie Ingenieuren eine detaillierte Bibliothek liefert, wie sich verschiedene Oberflächen anfühlen, wenn eine Fingerspitze in vielerlei Weise darüber gleitet.
Eine Bibliothek realer Oberflächen
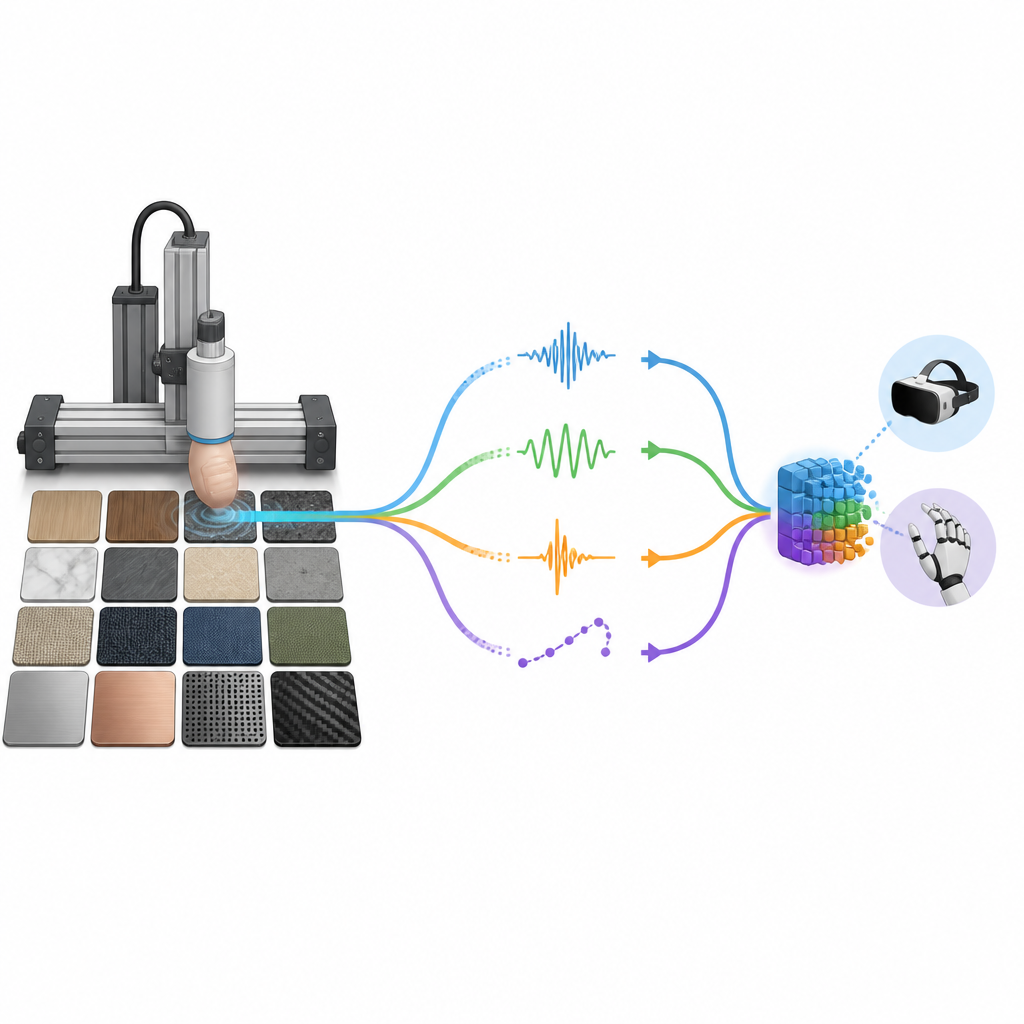
Das Team erstellte den sogenannten Cluster Haptic Texture Dataset, eine Sammlung von Aufnahmen von 118 Alltagsmaterialien. Dazu zählen Holz, Stein, Glas, Metall, Kunststoff, Stoffe, Keramik, Verbundwerkstoffe und verschiedene Lederarten. Anstatt auf menschliche Freiwillige zu setzen, die Oberflächen in ihrem eigenen Stil erkunden, verwendeten die Forscher eine künstliche Fingerspitze aus weichem Gummi. Diese Spitze wurde unter streng kontrollierten Bedingungen gegen jede Oberfläche gepresst und darüber geschoben, sodass die entstehenden Daten fair zwischen Materialien und Bewegungsmustern verglichen werden konnten.
Ein Roboterfinger, der hört und fühlt
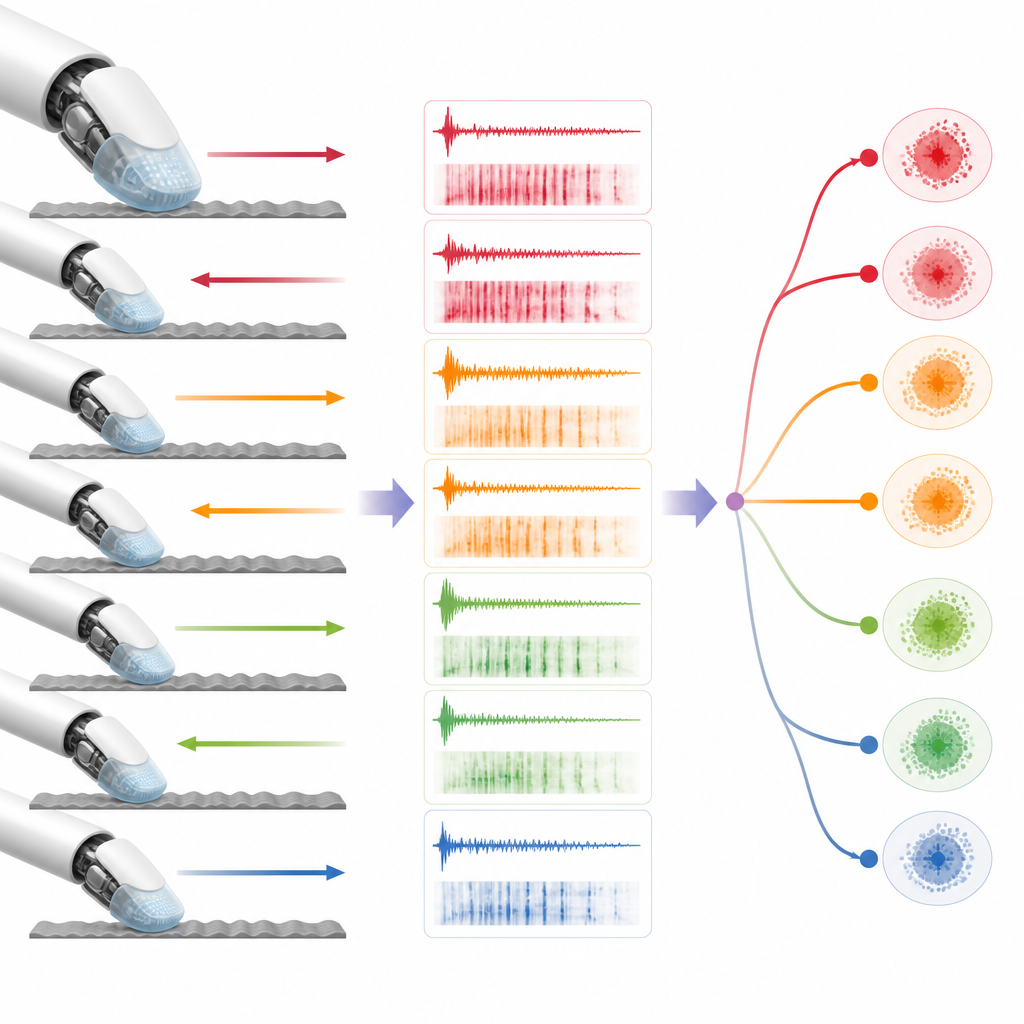
Um die Daten zu sammeln, modifizierten die Forscher einen dreiachsigen 3D-Drucker, sodass er die Gummifingerspitze mit hoher Präzision bewegen konnte. Während die Spitze über jede Oberfläche glitt, zeichneten Mikrofone die feinen Geräusche auf, ein Beschleunigungssensor erfasste Vibrationen, eine Kraftmesszelle misst den Kontaktkraftverlauf, und die Maschine protokollierte die Fingerspitzenposition. Messungen wurden in einer schalldichten Kammer durchgeführt, und das Team wandte anschließend aktive Rauschunterdrückung an, um das Maschinenbrummen zu entfernen. Für jedes Material testeten sie fünf Gleitgeschwindigkeiten, acht Richtungen und zwei Kraftstufen und wiederholten jeder Fall zweimal. Daraus entstanden 160 Bewegungsbedingungen pro Oberfläche und insgesamt 18.880 synchronisierte Aufnahmen sowie hochauflösende Bilder und Reibungsmessungen.
Von rohem Tastsinn zu verwertbaren Signalen
Das Sammeln der Daten ist nur ein Teil der Arbeit. Die Autoren mussten auch zeigen, dass die Daten Muster enthalten, aus denen Computer lernen können. Sie wandelten die Ton- und Vibrationsaufzeichnungen in farbige Zeit-Frequenz-Darstellungen um und trainierten verschiedene Algorithmentypen, um Texturen, Geschwindigkeiten und Richtungen zu erkennen. Tiefenlernmodelle auf Basis von konvolutionalen neuronalen Netzen zeigten besonders gute Leistungen und identifizierten den Oberflächentyp korrekt in etwa 96 Prozent der Fälle, wenn sowohl Ton als auch Vibration vorlagen. Sie schätzten außerdem die Gleitspeed mit rund 89 Prozent Genauigkeit und die Richtung mit etwa 79 Prozent Genauigkeit ein, was darauf hinweist, dass die Aufnahmen reichhaltige Hinweise darauf bewahren, wie sich die Fingerspitze bewegte.
Was sich mit Geschwindigkeit und Richtung ändert
Der Datensatz ermöglichte dem Team zu untersuchen, wie Materialeigenschaften beeinflussen, was Tastsensoren wahrnehmen. Glatte, reibungsarme Proben wie bestimmte Hölzer, Metalle und Kunststoffe lieferten Sensorsignale, die sich bei Geschwindigkeitsänderungen auf regelmäßige Weise veränderten, was zu sehr genauen Geschwindigkeitsbestimmungen führte. Dagegen erzeugten weiche oder unregelmäßige Oberflächen wie Gazen und manche Häute chaotischere Signale, wodurch die Geschwindigkeitsabschätzung schwieriger wurde. Für die Richtung ergaben Oberflächen mit starker Maserung oder Linienmustern die klarsten Resultate, da das Gleiten quer zur oder entlang der Maserung sehr unterschiedliche Vibrations- und Geräuschmuster erzeugte. Materialien mit flauschigen oder verformbaren Oberflächen neigten dazu, diese Unterschiede zu verwischen.
Was das für zukünftige Tachtechnologie bedeutet
Für Nichtfachleute ist die Kernbotschaft, dass wir jetzt eine öffentliche, gut organisierte Bibliothek von Tachdaten haben, die zeigt, wie etwas aussieht und wie es unter vielen Bewegungsarten klingt und sich anfühlt. Diese Ressource dürfte es erleichtern, Telefone, Controller und Virtual-Reality-Systeme zu entwerfen, die sich bei Streichen oder Tippen realistisch verhalten, und Roboter zu trainieren, die Materialien durch Tasten beurteilen können. Da Forschende weltweit den Datensatz und den zugehörigen Code herunterladen können, lassen sich Methoden fair vergleichen und aufeinander aufbauen — ähnlich wie es Bilddatensätze für die Computer Vision ermöglicht haben.
Zitation: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Schlüsselwörter: haptischer Texturdatensatz, taktiles Sensorik, haptik in virtueller Realität, Roboter-Tastsinn, multimodales maschinelles Lernen