Clear Sky Science · it
Cluster Haptic Texture Dataset: Dataset di texture aptiche con contatti di scorrimento a velocità e direzione variabili
Perché i dati tattili contano per la tua vita digitale
Cellulari che sembrano tessuto, realtà virtuale che ti fa percepire la venatura del legno e robot in grado di distinguere la pelle dal vetro: tutto questo si basa su una cosa sola: dati accurati sul tatto. Mentre fotocamere e microfoni dispongono di grandi dataset pubblici per l’apprendimento, il senso del tatto è stato privo di un riferimento raccolto con altrettanta cura. Questo lavoro presenta un nuovo dataset che colma questa lacuna, offrendo a scienziati e ingegneri una libreria dettagliata di come diverse superfici si percepiscono quando una punta di dito le scorre in molti modi.
Una libreria di superfici del mondo reale
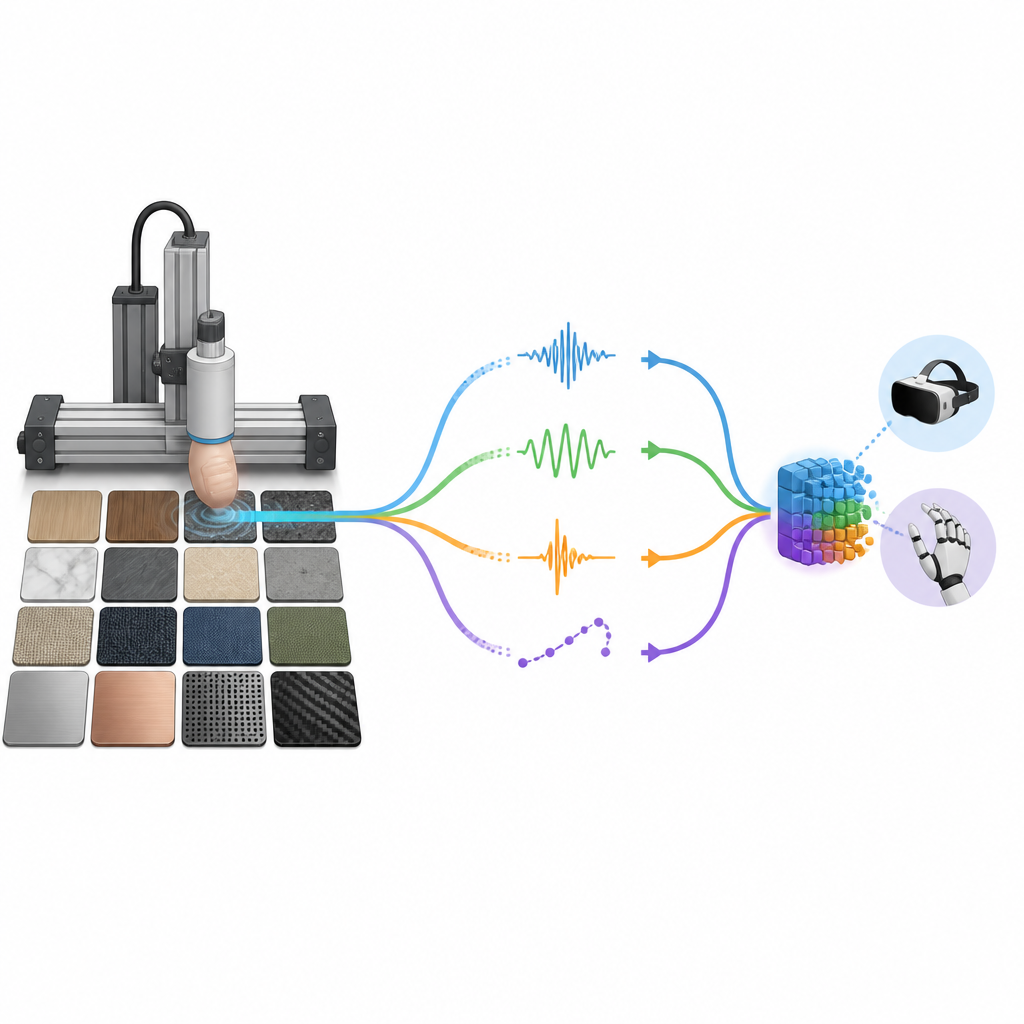
Il team ha costruito quello che chiamano Cluster Haptic Texture Dataset, una raccolta di registrazioni da 118 materiali di uso quotidiano. Tra questi troviamo legno, pietra, vetro, metallo, plastiche, tessuti, ceramiche, compositi e vari tipi di pelle. Invece di affidarsi a volontari umani che esplorassero le superfici con il proprio stile, i ricercatori hanno usato una punta di dito artificiale in gomma morbida. Questa punta è stata premuta e fatta scorrere su ciascuna superficie in condizioni strettamente controllate, così che i dati risultanti potessero essere confrontati in modo equo tra materiali e schemi di movimento.
Un dito robotico che ascolta e percepisce
Per raccogliere i dati, i ricercatori hanno modificato una stampante 3D a tre assi affinché potesse muovere la punta di gomma con grande precisione. Mentre la punta scorreva su ciascuna superficie, microfoni registravano i suoni minimi, un accelerometro tracciava le vibrazioni, una cella di carico misurava la forza di contatto e la macchina registrava la posizione della punta. Le misurazioni sono state effettuate all’interno di una camera anecoica e il team ha applicato successivamente tecniche di cancellazione attiva del rumore per rimuovere il ronzio della macchina. Per ogni materiale hanno testato cinque velocità di scorrimento, otto direzioni e due livelli di forza, ripetendo ogni condizione due volte. Questo ha prodotto 160 condizioni di movimento per superficie e un totale di 18.880 registrazioni sincronizzate, insieme a immagini ad alta risoluzione e misure di attrito.
Dal tatto grezzo a segnali utili
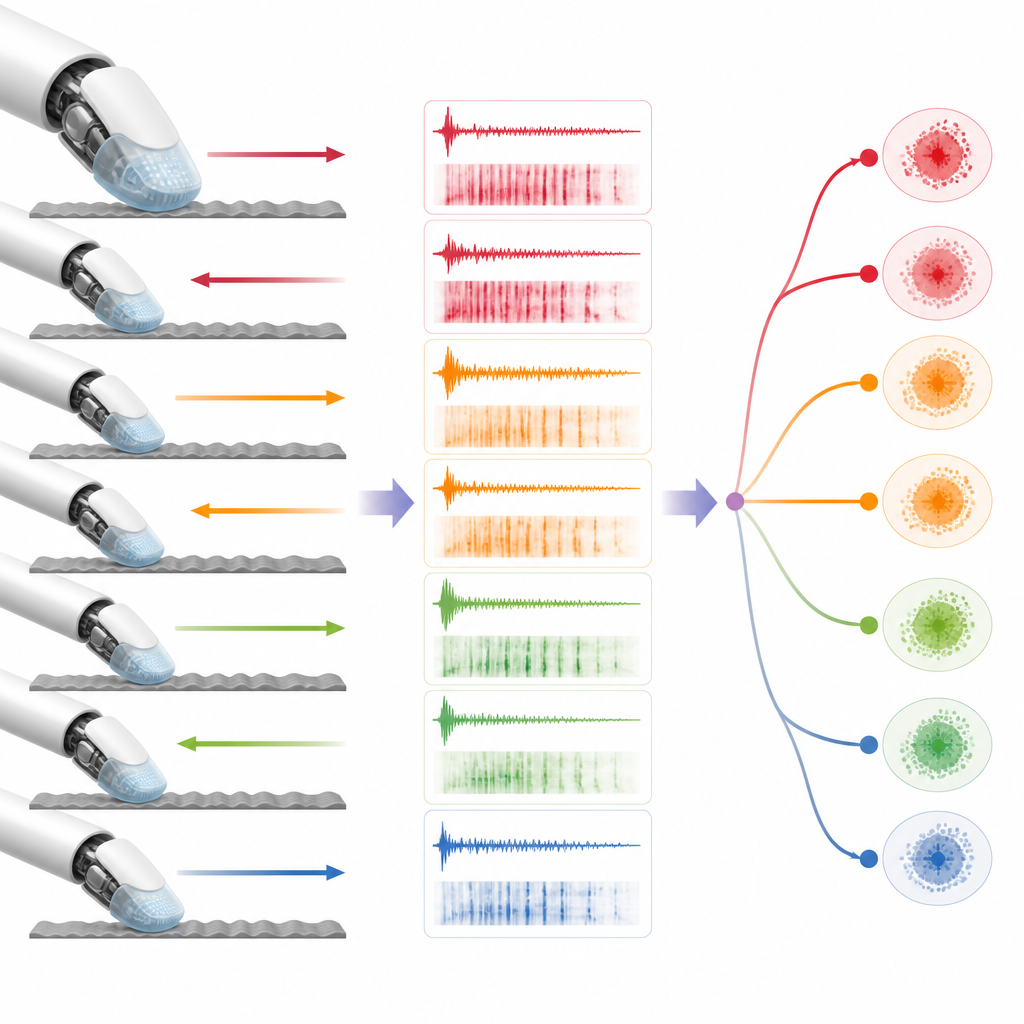
La raccolta dei dati è solo una parte della storia. Gli autori dovevano anche dimostrare che i dati contengono pattern che i computer possono apprendere. Hanno convertito le registrazioni sonore e di vibrazione in mappe tempo-frequenza colorate e hanno addestrato diversi tipi di algoritmi per riconoscere texture, velocità e direzioni. Modelli di deep learning basati su reti neurali convoluzionali hanno dato risultati particolarmente buoni, identificando correttamente il tipo di superficie circa il 96% delle volte quando sono stati forniti sia suono che vibrazione. Hanno inoltre stimato la velocità di scorrimento con circa l’89% di accuratezza e la direzione con circa il 79% di accuratezza, rivelando che le registrazioni preservano indizi ricchi su come la punta si stava muovendo.
Cosa cambia con velocità e direzione
Il dataset ha permesso al team di indagare come le proprietà dei materiali influenzino ciò che i sensori tattili rilevano. Campioni lisci e a basso attrito, come alcuni legni, metalli e plastiche, hanno prodotto segnali sensoriali che variavano in modo regolare al cambiare della velocità, permettendo un riconoscimento della velocità molto accurato. Al contrario, superfici morbide o irregolari come garze e alcune pelli hanno generato segnali più caotici, rendendo più difficile stimare la velocità. Per la direzione, le superfici con una venatura marcata o motivi lineari hanno dato i risultati più chiari, perché lo scorrimento trasversale o lungo la venatura produceva pattern di vibrazione e suono molto diversi. Materiali con superfici soffici o deformabili tendevano invece a sfumare queste differenze.
Cosa significa per le future tecnologie tattili
Per i non esperti, il messaggio chiave è che ora disponiamo di una libreria pubblica e ben organizzata di dati tattili che collega l’aspetto di qualcosa con il modo in cui suona e si percepisce al tatto in molte modalità di movimento. Questa risorsa dovrebbe facilitare la progettazione di telefoni, controller e sistemi di realtà virtuale che rispondano in modo realistico quando scorri o tocchi, e l’addestramento di robot in grado di giudicare i materiali mediante il tatto. Poiché i ricercatori di tutto il mondo possono scaricare il dataset e il codice correlato, possono confrontare i metodi in modo equo e costruire sul lavoro degli altri, proprio come hanno fatto i dataset di immagini per la visione artificiale.
Citazione: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Parole chiave: dataset di texture aptiche, sensing tattile, haptica per realtà virtuale, tatto robotico, apprendimento automatico multimodale