Clear Sky Science · fr
Ensemble de données haptiques de texture Cluster : ensemble de textures haptiques avec contacts de glissement à vitesse et direction variables
Pourquoi les données tactiles comptent pour votre vie numérique
Des téléphones qui donnent la sensation du tissu, une réalité virtuelle qui vous permet de percevoir le grain du bois, et des robots capables de distinguer le cuir du verre reposent tous sur une même chose : de bonnes données sur le toucher. Alors que les caméras et les microphones bénéficient de vastes jeux de données publics pour apprendre, notre sens du toucher a manqué d’un référentiel collecté avec la même rigueur. Cet article présente un nouvel ensemble de données qui comble cette lacune, offrant aux scientifiques et ingénieurs une bibliothèque détaillée de la façon dont différentes surfaces se ressentent lorsqu’un doigt se déplace dessus de multiples manières.
Une bibliothèque de surfaces réelles
L’équipe a constitué ce qu’elle appelle le Cluster Haptic Texture Dataset, une collection d’enregistrements provenant de 118 matériaux du quotidien. On y trouve du bois, de la pierre, du verre, du métal, des plastiques, des tissus, des céramiques, des composites et différentes peaux. Plutôt que de laisser des volontaires humains explorer les surfaces à leur manière, les chercheurs ont utilisé un bout de doigt artificiel en caoutchouc souple. Ce doigt a été pressé et glissé sur chaque surface dans des conditions étroitement contrôlées afin que les données obtenues puissent être comparées équitablement entre matériaux et types de mouvement.
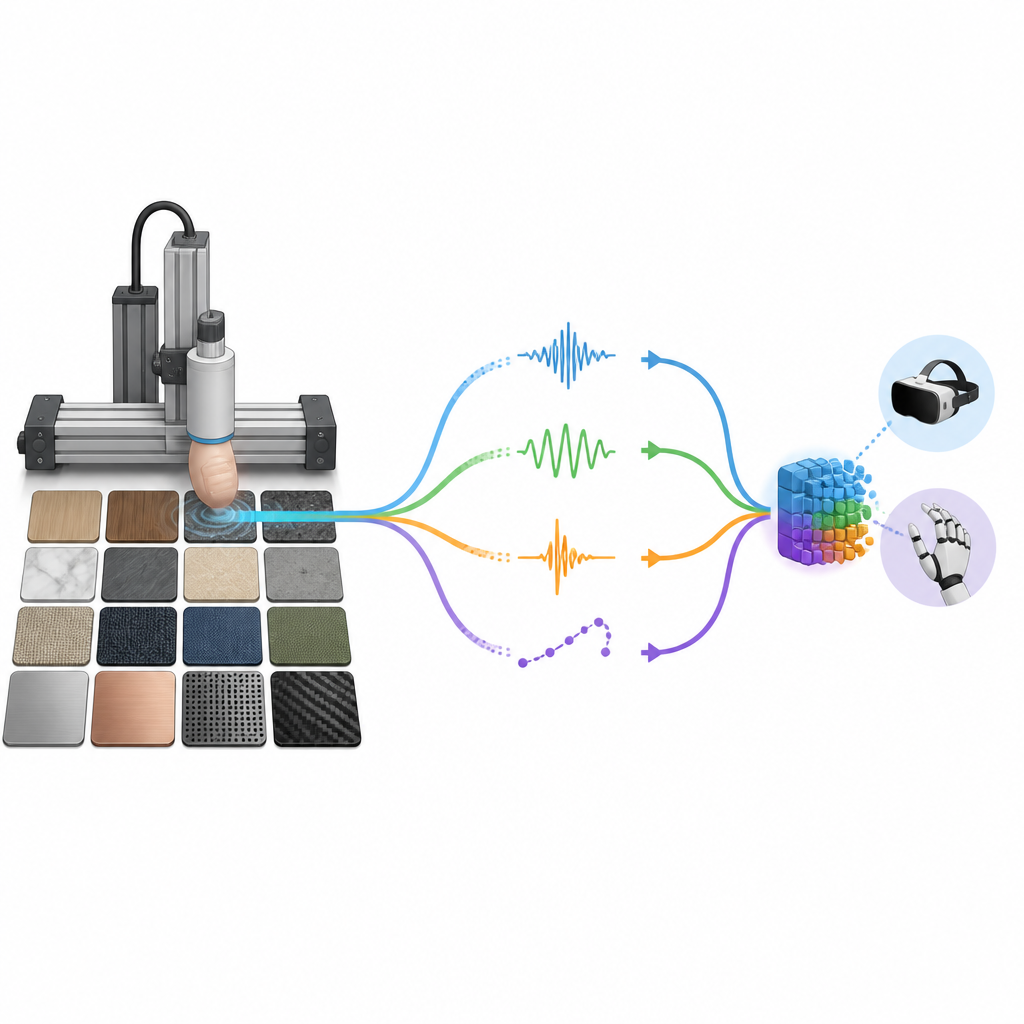
Un doigt robotique qui écoute et ressent
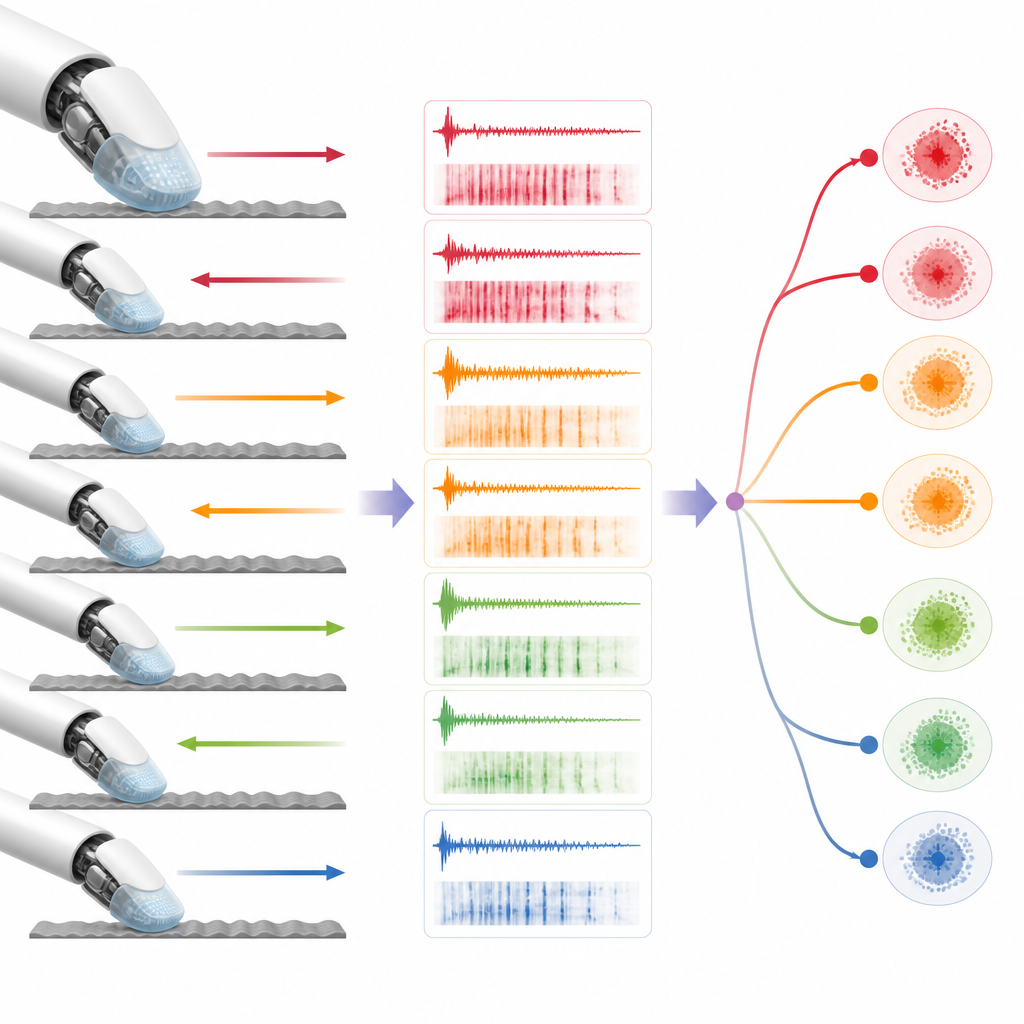
Pour collecter les données, les chercheurs ont modifié une imprimante 3D à trois axes afin de déplacer le bout de doigt en caoutchouc avec une grande précision. Pendant que la pointe glissait sur chaque surface, des microphones enregistraient les sons microscopiques, un accéléromètre suivait les vibrations, une cellule de charge mesurait la force de contact et la machine consignait la position du bout de doigt. Les mesures ont été prises dans une boîte insonorisée, et l’équipe a appliqué ensuite une annulation active du bruit pour éliminer le bourdonnement de la machine. Pour chaque matériau, ils ont testé cinq vitesses de glissement, huit directions et deux niveaux de force, en répétant chaque condition deux fois. Cela a produit 160 conditions de mouvement par surface et un total de 18 880 enregistrements synchronisés, ainsi que des images haute résolution et des mesures de friction.
Du toucher brut aux signaux exploitables
Collecter les données ne constitue qu’une partie de l’histoire. Les auteurs devaient aussi montrer qu’elles contiennent des motifs exploitables par des ordinateurs. Ils ont converti les enregistrements sonores et vibratoires en cartes temps‑fréquence colorées et entraîné différents types d’algorithmes à reconnaître textures, vitesses et directions. Les modèles d’apprentissage profond basés sur des réseaux de neurones convolutionnels ont été particulièrement performants, identifiant correctement le type de surface dans environ 96 % des cas lorsqu’on leur fournissait à la fois le son et les vibrations. Ils ont également estimé la vitesse de glissement avec près de 89 % de précision et la direction avec environ 79 % de précision, ce qui montre que les enregistrements conservent des indices riches sur les mouvements du bout de doigt.
Ce qui change avec la vitesse et la direction
L’ensemble de données a permis à l’équipe d’examiner comment les propriétés des matériaux influencent les captures des capteurs tactiles. Des échantillons lisses et à faible friction, comme certains bois, métaux et plastiques, ont produit des signaux capteurs qui variaient de manière régulière avec la vitesse, conduisant à une reconnaissance de vitesse très précise. En revanche, des surfaces souples ou irrégulières comme la gaze ou certaines peaux ont généré des signaux plus chaotiques, rendant l’estimation de la vitesse plus difficile. Pour la direction, les surfaces présentant un grain marqué ou des motifs ligné ont donné les résultats les plus clairs, car glisser à travers ou le long du grain produisait des motifs de vibration et de son très différents. Les matériaux à surface duveteuse ou déformable avaient tendance à estomper ces différences.
Ce que cela signifie pour la technologie tactile future
Pour les non‑spécialistes, le message clé est que nous disposons désormais d’une bibliothèque publique et bien organisée de données tactiles qui relie l’apparence d’un objet à la façon dont il sonne et se ressent sous de nombreuses modalités de déplacement. Cette ressource devrait faciliter la conception de téléphones, de manettes et de systèmes de réalité virtuelle qui réagissent de manière réaliste lorsque vous balayez ou tapez, et permettre de former des robots capables d’évaluer les matériaux par le toucher. Comme les chercheurs du monde entier peuvent télécharger l’ensemble de données et le code associé, ils peuvent comparer les méthodes équitablement et s’appuyer sur le travail des uns et des autres, à l’image de ce que les jeux de données d’images ont apporté à la vision par ordinateur.
Citation: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Mots-clés: ensemble de données de textures haptiques, perception tactile, haptiques pour réalité virtuelle, toucher robotique, apprentissage automatique multimodal