Clear Sky Science · zh
一种基于微吸管电阻建模的机器人贴片钳系统:实时定位与相位同步捕获体内动态细胞
窃听单个脑细胞
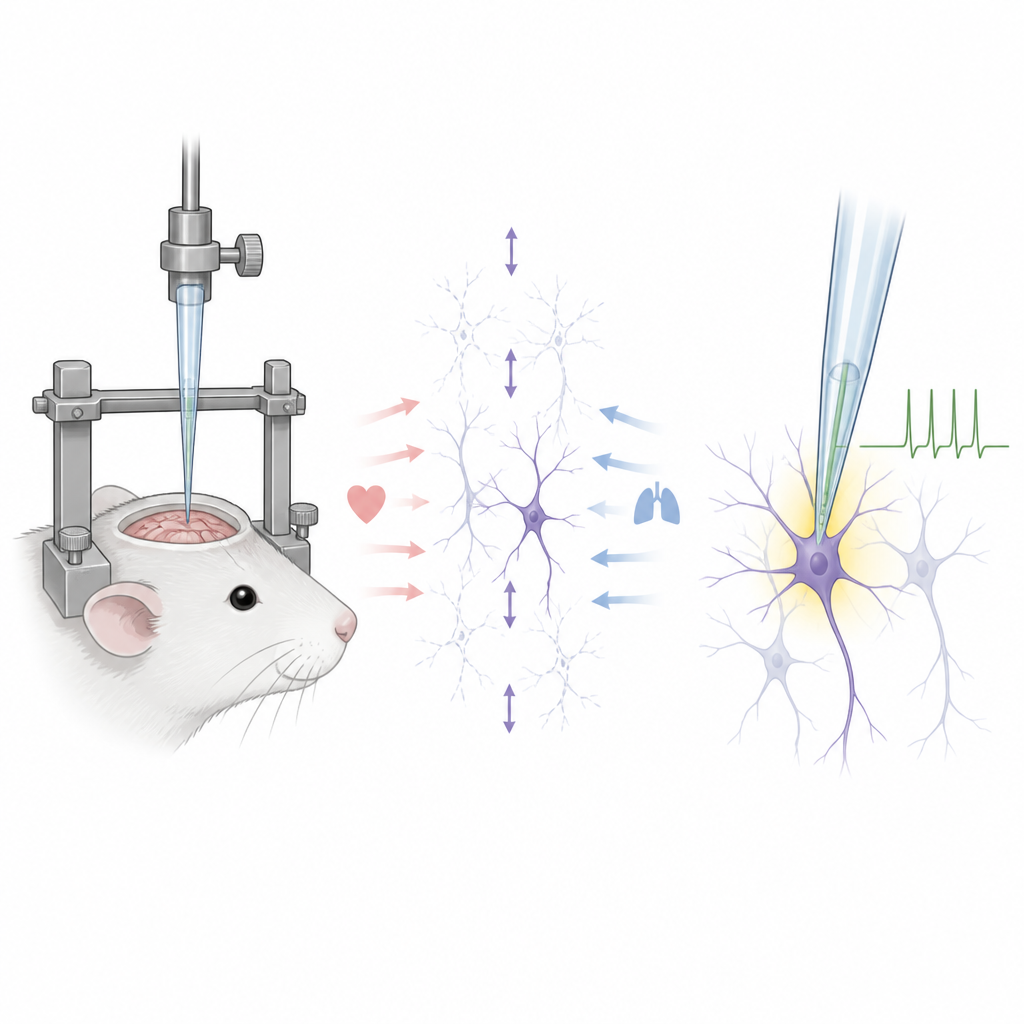
理解单个脑细胞如何相互交流是解释思维、感知和疾病的关键。但在活体动物中记录单个神经元的微弱电信号,就像试图把麦克风插到一个移动的目标上一样困难。本研究介绍了一种机器人系统,能够更可靠地追踪并捕捉这些移动的细胞,从而使在大脑深处进行更常规、精确的测量成为可能。
为何捕获一个细胞如此困难
贴片钳记录使用一根精细的玻璃管——微吸管,轻柔地与神经元形成密封并测量万亿分之一安培量级的电流。在培养皿中这项技术尽管要求高但可控。然而在活体大脑内,细胞不断受到呼吸和搏动血管的扰动。即便采用刚性头部固定和微小颅窗,神经元仍会移动数微米,这足以导致吸管错过、擦过或刺破细胞。现有机器人系统要么依赖粗略的电学线索盲目导航,要么依赖价格高昂、扫描缓慢且仅限浅层组织的双光子显微镜。
将电阻转变为距离传感器
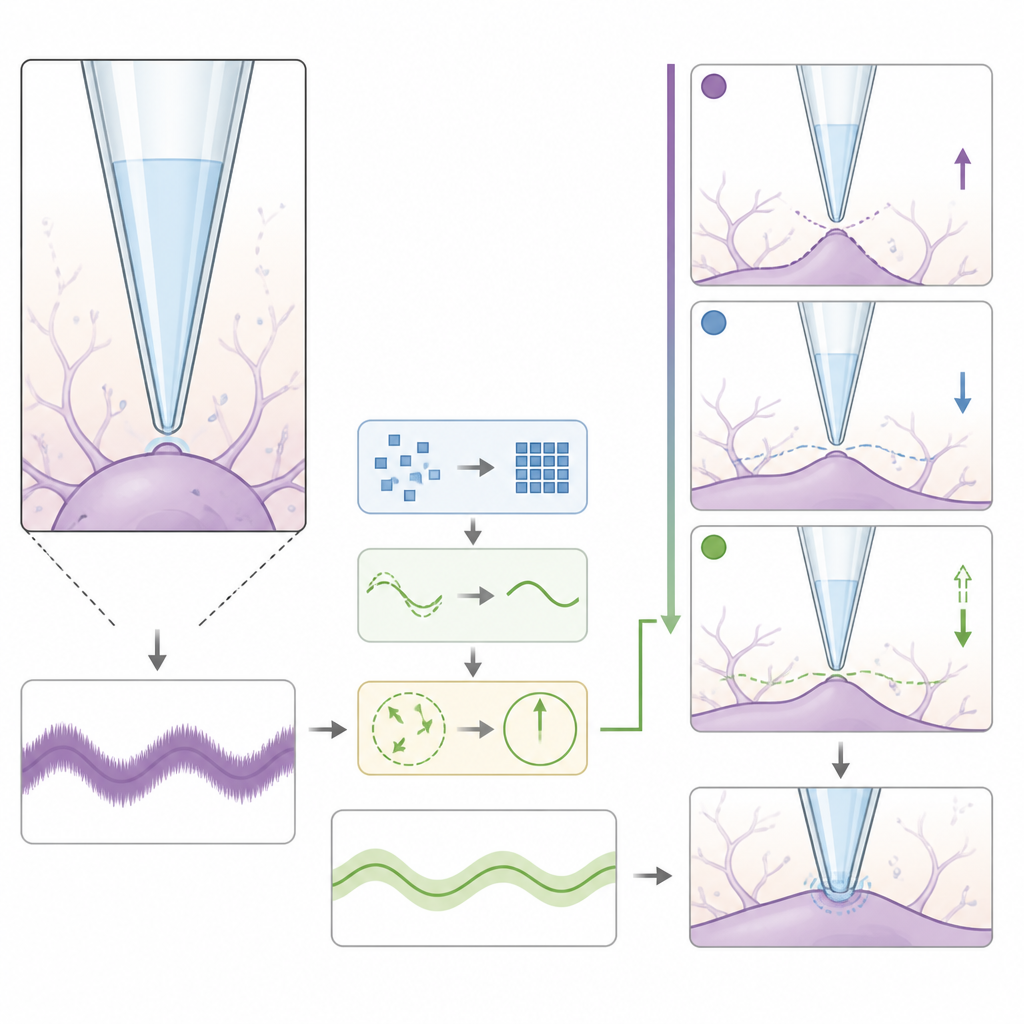
Li 等人通过把微吸管不仅视为记录器,而且视为精确的测距仪来解决这一问题。由于脑脊液等流体比细胞膜导电性更强,吸管尖端的电阻在接近细胞表面时会以可预测的方式上升。团队建立了一个详尽的物理与计算模型,将该电阻与吸管和膜之间的真实距离联系起来,考虑了吸管形状、流体流动以及软组织在压力下的变形。他们使用有限元模拟和对吸管几何形状的精确测量对该模型进行标定,并证实该模型甚至可以估算不同细胞和表面的刚度。
滤除噪声并跟踪细胞运动
在活体大脑中,电阻信号嘈杂,并混杂着来自心跳和呼吸的节律性波动。为实现实时地清晰跟踪细胞运动,作者设计了一种自定义滤波方法,将自适应频率跟踪与卡尔曼滤波相结合。该方法将两种主要的运动节律分离,跟踪其变化的频率,并在不扭曲时序的情况下重建平滑信号。在脑切片实验中,研究者按受控模式移动吸管以模拟生理运动,系统可将实际吸管到细胞的距离估计误差控制在小于半微米。这一精度足以安全地控制决定最终形成稳定密封还是撕裂膜的最后几微米。
选择形成密封的最佳时刻
在实现实时运动跟踪后,团队接着研究在每个运动周期中何时接触细胞最为合适。他们比较了四种定时策略,发现以细胞远离吸管的时刻为目标效果最佳。在这个转折点,细胞会短暂停止然后向吸管方向回移,提供更长时间的温和接触,有利于形成密封。在麻醉小鼠中,在该相位进行捕获所得到的密封电阻达到十亿欧姆量级,比不那么有利的时机高出最多55倍。测试还表明,接触后持续运动引起的适度额外压入并不会损伤细胞或阻碍稳定记录。
跨物种的机器人记录
所有这些要素被集成到一个机器人贴片钳平台中,通过统一界面控制吸管运动、压力和数据采集。在小鼠中,该系统在超过90%的尝试中检测到附近的细胞,并在其中约82%的情况下形成高质量密封,显著优于早期的机器人方法。它在浅层和深层(大约到离脑表面一毫米)均表现良好。研究者还展示了相同框架可应用于大鼠和狨猴,包括清醒动物,通过从电阻变化中读出各自不同的心跳和呼吸模式并相应地调整接触时机。
这对脑科学意味着什么
对非专业读者而言,核心信息是这项工作将一项精细的技艺转变为更可重复、可自动化的过程。通过感知吸管与移动神经元之间的距离并在其运动的最宽容相位发起接触,该系统更容易在许多脑区和物种中获得稳定、持久的单细胞记录。这将帮助神经科学家收集更清晰的数据以研究神经元在正常活动及疾病状态下的行为,并可能最终支持其他需要在活体大脑内进行精确、温和接触的单细胞操作。
引用: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
关键词: 贴片钳, 神经元记录, 脑部机器人学, 体内电生理学, 单细胞跟踪