Clear Sky Science · en
A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling
Listening In On Single Brain Cells
Understanding how individual brain cells talk to each other is key to explaining thought, perception, and disease. But recording the tiny electrical signals of single neurons in a living, breathing animal is like trying to plug a microphone into a moving target. This study introduces a robotic system that can track and catch these shifting cells with far greater reliability, opening the door to more routine, precise measurements deep inside the brain.
Why Catching a Cell Is So Hard
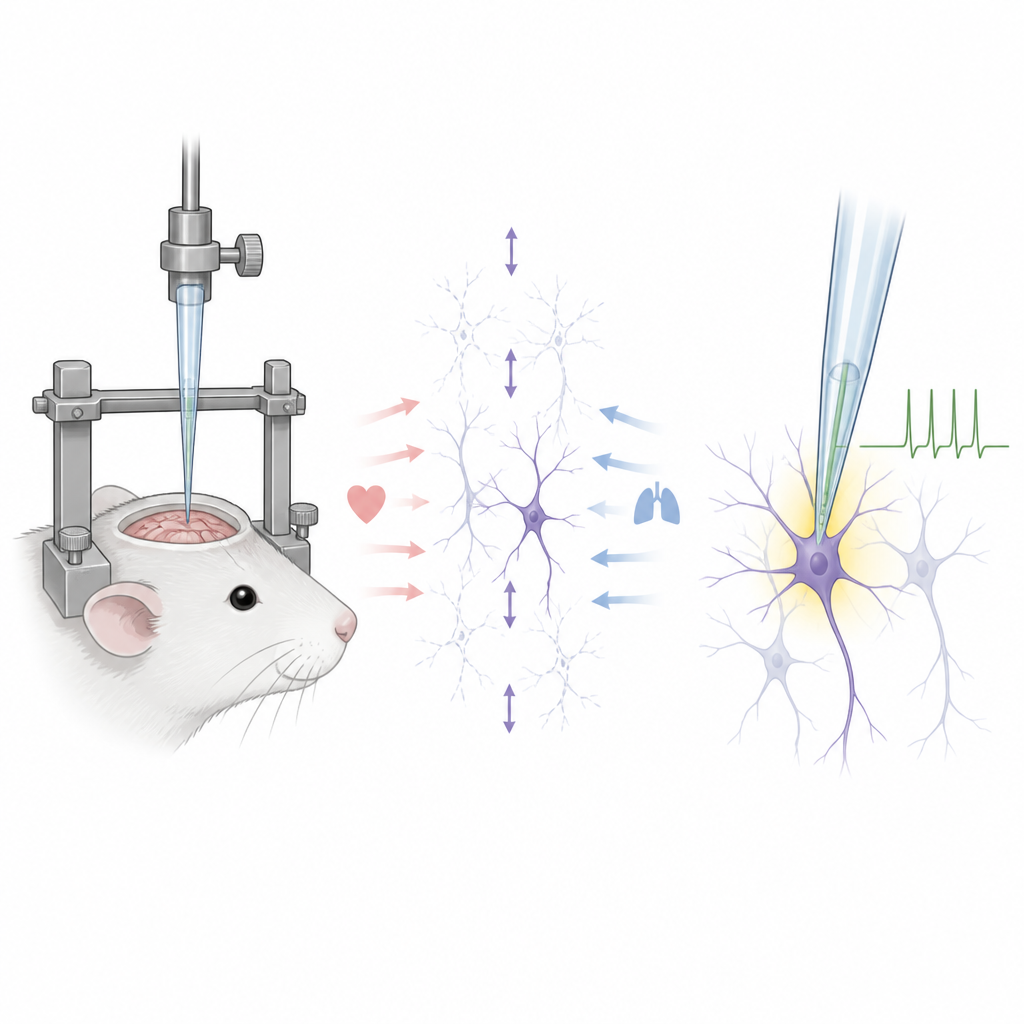
Patch clamp recording uses a fine glass tube, called a micropipette, to gently seal onto a neuron and measure currents a trillionth of an amp in size. In the lab dish this is demanding but manageable. Inside a living brain, however, the cell is constantly jostled by breathing and pulsing blood vessels. Even with rigid head fixation and tiny openings in the skull, neurons still move by several micrometers, enough to make the pipette miss, scrape past, or puncture the cell. Existing robotic systems either navigate blindly from crude electrical cues or rely on two-photon microscopes that are expensive, slow to scan, and limited to shallow tissue.
Turning Electrical Resistance Into a Distance Sensor
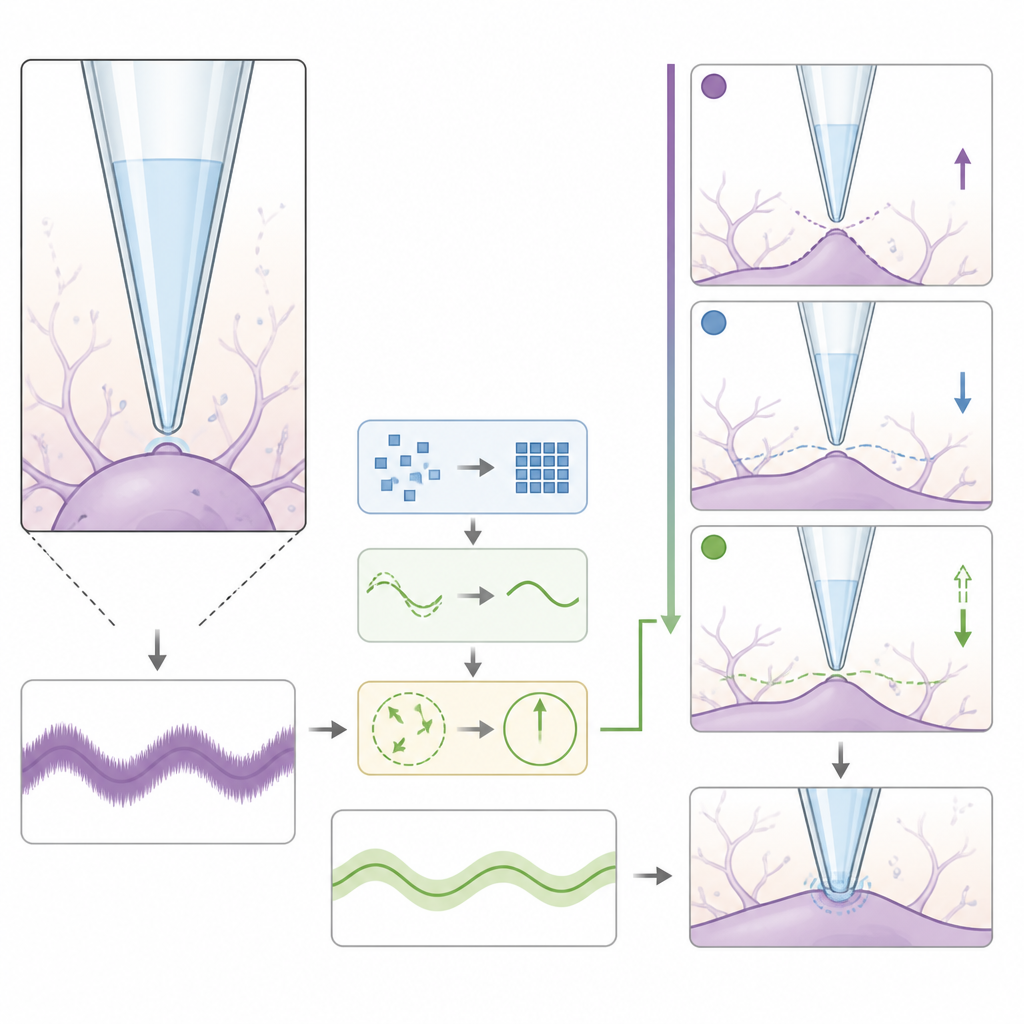
Li and colleagues tackle this problem by treating the micropipette not just as a recorder, but as a precise range finder. Because brain fluid conducts electricity much better than a cell membrane, the electrical resistance at the pipette tip rises in a predictable way as it approaches the cell surface. The team built a detailed physical and computer model that links this resistance to the true distance between pipette and membrane, accounting for pipette shape, fluid flow, and the way soft tissue deforms under pressure. They calibrated this model using finite element simulations and careful measurements of pipette geometry, then confirmed that it can even estimate how stiff different cells and surfaces are.
Filtering the Noise and Tracking Cell Motion
In a living brain, the resistance signal is noisy and mixed with rhythmic fluctuations from heartbeat and breathing. To cleanly track cell motion in real time, the authors designed a custom filtering approach that combines adaptive frequency tracking with a Kalman filter. This method separates the two main motion rhythms, follows their changing frequencies, and reconstructs a smooth signal without distorting timing. In brain slice experiments, where the pipette was moved in controlled patterns to mimic physiological motion, the system could estimate the actual pipette-to-cell distance with errors under half a micrometer. This accuracy is enough to safely control the final few micrometers that decide whether a stable seal or a torn membrane results.
Choosing the Best Moment to Seal
With motion tracked in real time, the team then asked when, within each motion cycle, the pipette should touch the cell. They compared four timing strategies and found that aiming for the cell’s farthest point from the pipette worked best. At this turning point, the cell briefly pauses and then moves back toward the pipette, giving a longer period of gentle contact that favors seal formation. In anesthetized mice, captures at this phase produced seal resistances on the order of a billion ohms, up to 55 times higher than less favorable timings. Tests also showed that modest extra indentation caused by ongoing motion after contact did not damage cells or prevent stable recordings.
Robots Recording Across Species
All of these elements were integrated into a robotic patch-clamp platform that controls pipette motion, pressure, and data acquisition through a unified interface. In mice, the system detected nearby cells in over 90 percent of attempts and formed high-quality seals in about 82 percent of those cases, a clear improvement over earlier robotic methods. It worked similarly well at shallow and deep sites, down to about one millimeter below the brain surface. The researchers then showed that the same framework can be applied to rats and to marmoset monkeys, including awake animals, by reading out their distinct heartbeat and breathing patterns from resistance changes and timing the approach accordingly.
What This Means for Brain Research
For non-specialists, the core message is that this work turns a delicate art into a more repeatable, automated process. By sensing how far the pipette is from a moving neuron and striking at the most forgiving phase of its motion, the system makes it easier to obtain stable, long-lasting recordings from single cells in many brain regions and species. This should help neuroscientists gather cleaner data on how neurons behave during normal activity and disease, and may ultimately support other single-cell procedures that require accurate, gentle contact inside the living brain.
Citation: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Keywords: patch clamp, neuron recording, brain robotics, in vivo electrophysiology, single-cell tracking