Clear Sky Science · it
Un sistema robotico di patch-clamp con localizzazione in tempo reale e cattura sincronizzata alla fase di cellule dinamiche in vivo usando la modellizzazione della resistenza della micropipetta
Ascoltare singole cellule cerebrali
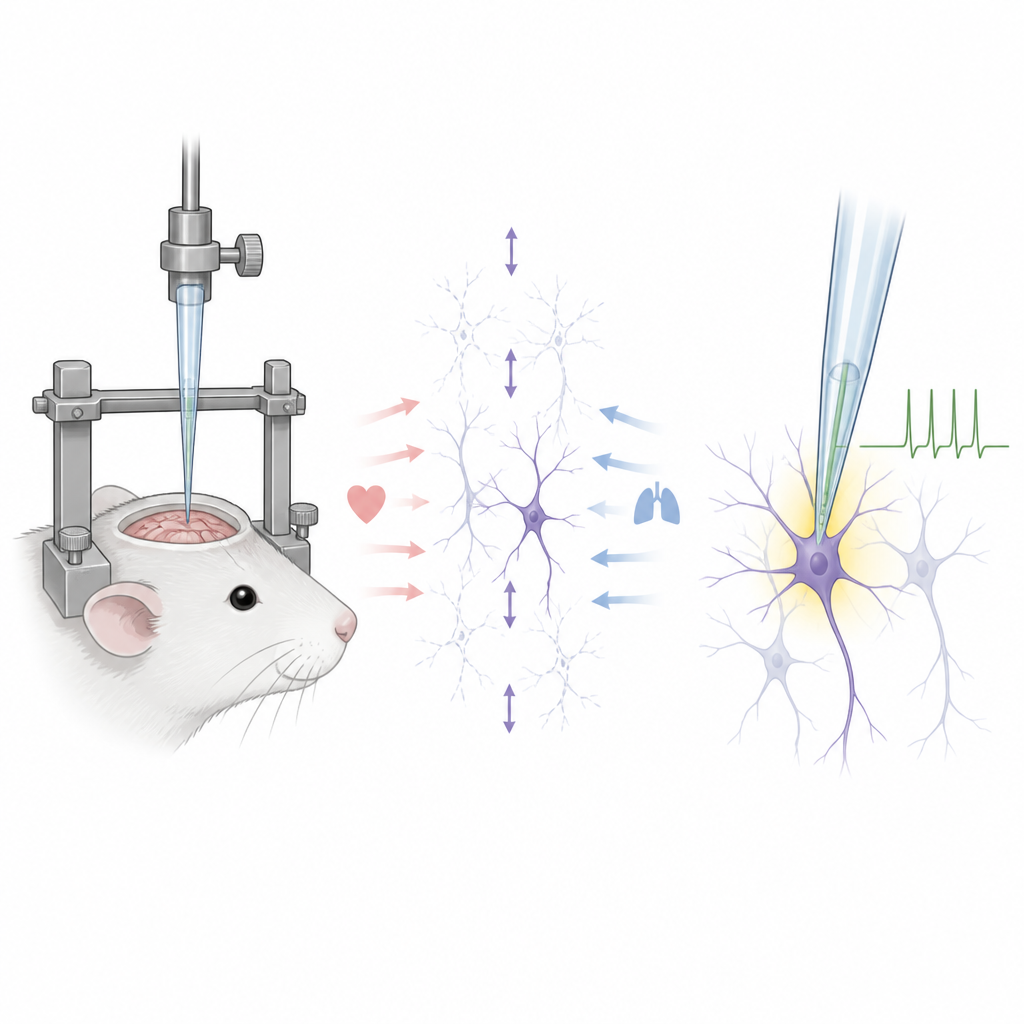
Capire come le singole cellule cerebrali comunicano tra loro è fondamentale per spiegare il pensiero, la percezione e le malattie. Ma registrare i deboli segnali elettrici dei singoli neuroni in un animale vivo che respira è come cercare di collegare un microfono a un bersaglio in movimento. Questo studio presenta un sistema robotico che può tracciare e catturare queste cellule in movimento con molta maggiore affidabilità, aprendo la strada a misurazioni più routinarie e precise in profondità nel cervello.
Perché catturare una cellula è così difficile
La registrazione patch-clamp utilizza un sottile tubo di vetro, chiamato micropipetta, per sigillarsi delicatamente su un neurone e misurare correnti dell’ordine del trilionesimo di ampere. In una piastra di coltura questo è impegnativo ma fattibile. Nel cervello vivente, però, la cellula è continuamente scossa dalla respirazione e dai vasi sanguigni pulsanti. Anche con fissazione rigidissima della testa e piccole aperture nel cranio, i neuroni si muovono ancora di diversi micrometri, abbastanza da far mancare la micropipetta, sfiorare o perforare la cellula. I sistemi robotici esistenti navigano o con indicazioni elettriche grossolane o si basano su microscopi a due fotoni che sono costosi, lenti nello scansione e limitati ai tessuti superficiali.
Trasformare la resistenza elettrica in un sensore di distanza
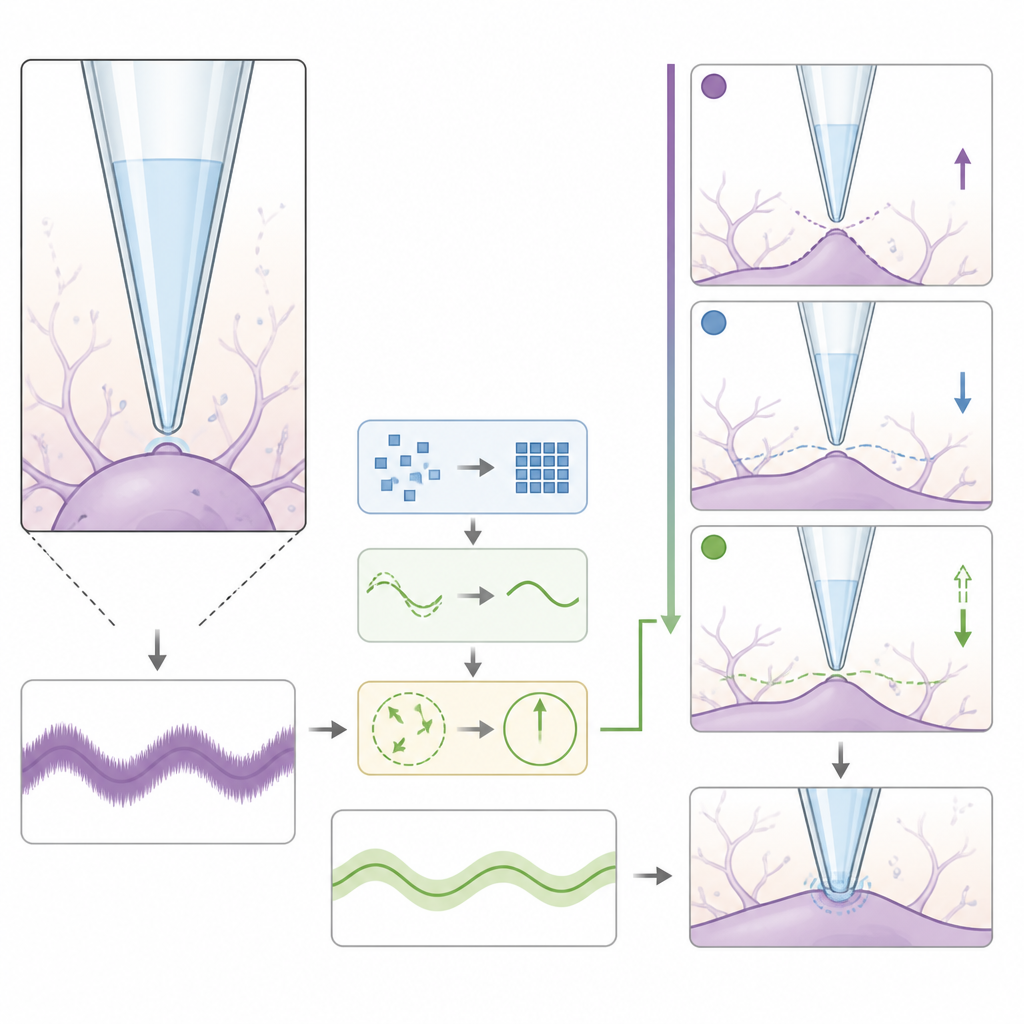
Li e colleghi affrontano questo problema trattando la micropipetta non solo come un registratore, ma come un preciso misuratore di distanza. Poiché il fluido cerebrale conduce elettricità molto meglio della membrana cellulare, la resistenza elettrica alla punta della pipetta aumenta in modo prevedibile avvicinandosi alla superficie cellulare. Il team ha costruito un modello fisico e computazionale dettagliato che collega questa resistenza alla distanza reale tra pipetta e membrana, tenendo conto della forma della pipetta, del flusso del fluido e del modo in cui i tessuti molli si deformano sotto pressione. Hanno calibrato il modello usando simulazioni agli elementi finiti e misure accurate della geometria della pipetta, quindi hanno confermato che può perfino stimare quanto siano rigide diverse cellule e superfici.
Filtrare il rumore e tracciare il movimento cellulare
Nel cervello vivo, il segnale di resistenza è rumoroso e mescolato a fluttuazioni ritmiche dovute al battito cardiaco e alla respirazione. Per tracciare pulitamente il moto cellulare in tempo reale, gli autori hanno progettato un approccio di filtraggio su misura che combina il tracciamento adattivo delle frequenze con un filtro di Kalman. Questo metodo separa i due principali ritmi di movimento, segue le loro frequenze variabili e ricostruisce un segnale liscio senza distorcere i tempi. In esperimenti su sezioni di cervello, dove la pipetta è stata mossa con pattern controllati per imitare il moto fisiologico, il sistema è riuscito a stimare la distanza effettiva pipetta-cellula con errori inferiori a mezzo micrometro. Questa precisione è sufficiente per controllare in sicurezza gli ultimi pochi micrometri che determinano se si forma un sigillo stabile o se la membrana viene lacerata.
Scegliere il momento migliore per sigillare
Con il movimento tracciato in tempo reale, il team ha poi valutato quando, all’interno di ogni ciclo di movimento, la pipetta dovrebbe toccare la cellula. Hanno confrontato quattro strategie di temporizzazione e hanno scoperto che mirare al punto in cui la cellula si trova più lontana dalla pipetta dava i risultati migliori. In quel punto di inversione, la cellula si ferma brevemente e poi torna verso la pipetta, offrendo un periodo più lungo di contatto delicato che favorisce la formazione del sigillo. Nei topi anestetizzati, le catture a questa fase hanno prodotto resistenze di sigillo dell’ordine del gigaohm, fino a 55 volte più alte rispetto a temporizzazioni meno favorevoli. I test hanno inoltre mostrato che una moderata ulteriore indentazione causata dal movimento continuo dopo il contatto non danneggia le cellule né impedisce registrazioni stabili.
Robot che registrano attraverso specie diverse
Tutti questi elementi sono stati integrati in una piattaforma robotica di patch-clamp che controlla il movimento della pipetta, la pressione e l’acquisizione dei dati tramite un’interfaccia unificata. Nei topi, il sistema ha rilevato cellule vicine in oltre il 90 percento dei tentativi e ha formato sigilli di alta qualità in circa l’82 percento di quei casi, un chiaro miglioramento rispetto ai metodi robotici precedenti. Ha funzionato similmente bene sia in siti superficiali sia profondi, fino a circa un millimetro sotto la superficie cerebrale. I ricercatori hanno poi mostrato che lo stesso quadro può essere applicato a ratti e a marmoset, inclusi animali svegli, leggendo i distinti schemi di battito cardiaco e respirazione dalle variazioni di resistenza e temporizzandone l’approccio di conseguenza.
Cosa significa per la ricerca sul cervello
Per i non specialisti, il messaggio principale è che questo lavoro trasforma un’arte delicata in un processo più ripetibile e automatizzato. Sensendo la distanza tra pipetta e neurone in movimento e colpendo nella fase più indulgente del suo moto, il sistema facilita l’ottenimento di registrazioni stabili e durevoli da singole cellule in molte aree del cervello e specie diverse. Questo dovrebbe aiutare i neuroscienziati a raccogliere dati più puliti su come i neuroni si comportano durante l’attività normale e nelle malattie, e potrebbe infine supportare altre procedure su singole cellule che richiedono contatto accurato e gentile all’interno del cervello vivente.
Citazione: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Parole chiave: patch clamp, registrazione neuronale, robotica cerebrale, elettrofisiologia in vivo, tracciamento di singole cellule