Clear Sky Science · nl
Een robotisch patch-clamp-systeem met realtime lokalisatie en fasesynchronisatie voor het vangen van dynamische in vivo-cellen met behulp van micropipet-weerstandsmodellering
Luisteren naar individuele hersencellen
Begrijpen hoe individuele hersencellen met elkaar communiceren is essentieel om denken, waarneming en ziekte te verklaren. Maar de zeer kleine elektrische signalen van enkele neuronen opnemen in een levend, ademend dier is alsof je een microfoon op een bewegend doel probeert aan te sluiten. Deze studie introduceert een robotisch systeem dat deze verschuivende cellen veel betrouwbaarder kan volgen en vangen, wat de deur opent naar meer routinematige, precieze metingen diep in de hersenen.
Waarom het vangen van een cel zo moeilijk is
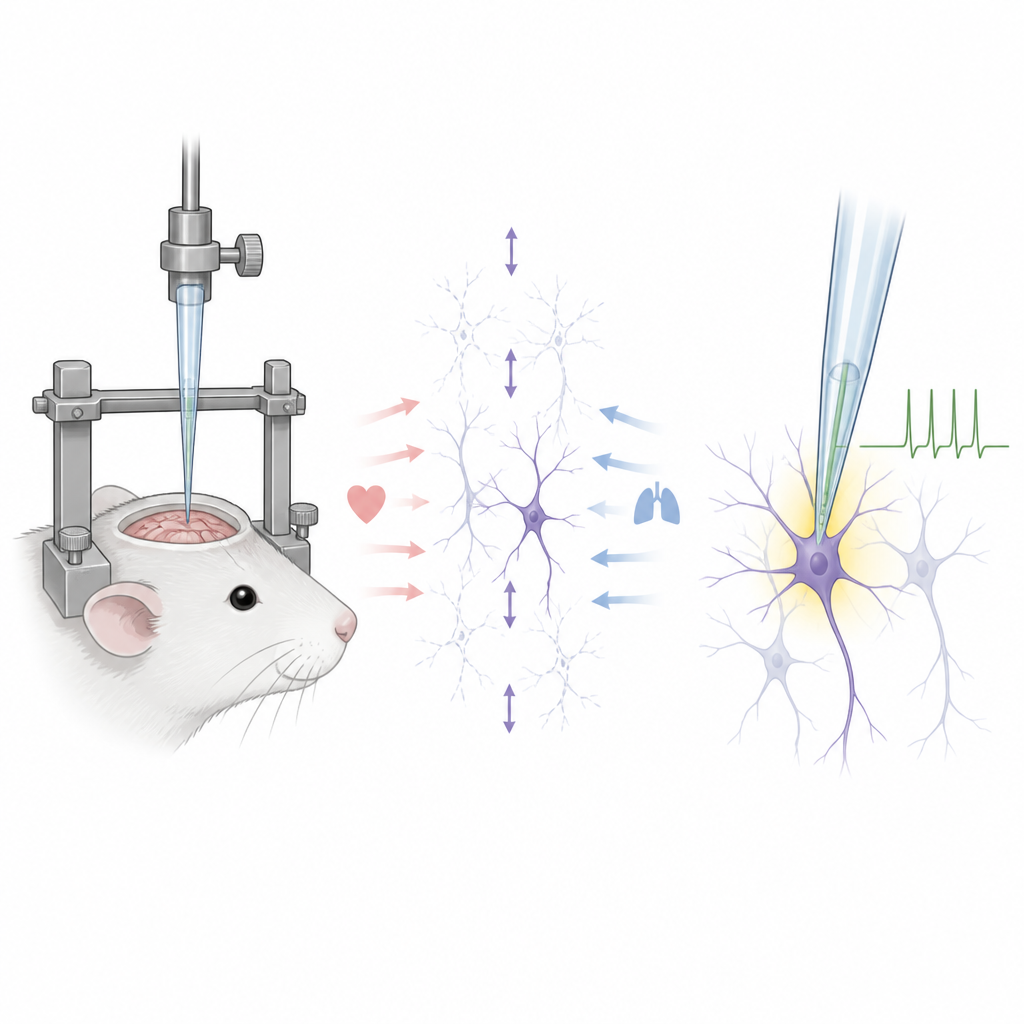
Patch-clamp-opname gebruikt een dun glazen buisje, een micropipet genoemd, om voorzichtig op een neuron te hechten en stromen te meten van de orde van een biljoenste ampère. In een schaaltje is dit veeleisend maar beheersbaar. In een levend brein daarentegen wordt de cel voortdurend geschud door ademhaling en pulserende bloedvaten. Zelfs met stevige hoofdfixatie en kleine openingen in de schedel bewegen neuronen nog enkele micrometers, genoeg om de pipet te laten missen, erlangs te schrapen of de cel te doorboren. Bestaande robotische systemen navigeren ofwel blind op grove elektrische aanwijzingen of vertrouwen op twee-fotonmicroscopen die duur zijn, langzaam scannen en beperkt zijn tot oppervlakkige weefsels.
Elektrische weerstand als afstandssensor
Li en collega’s tackelen dit probleem door de micropipet niet alleen als recorder te zien, maar als een precieze afstandsmeter. Omdat hersenvocht elektriciteit veel beter geleidt dan een celmembraan, stijgt de elektrische weerstand bij de pipetpunt op een voorspelbare manier naarmate deze het celoppervlak nadert. Het team bouwde een gedetailleerd fysisch en computermodel dat deze weerstand koppelt aan de werkelijke afstand tussen pipet en membraan, rekening houdend met pipetvorm, vloeistofstroming en de wijze waarop zacht weefsel onder druk vervormt. Ze kalibreerden dit model met eindige-elementensimulaties en zorgvuldige metingen van pipetgeometrie, en bevestigden vervolgens dat het zelfs kan inschatten hoe stijf verschillende cellen en oppervlakken zijn.
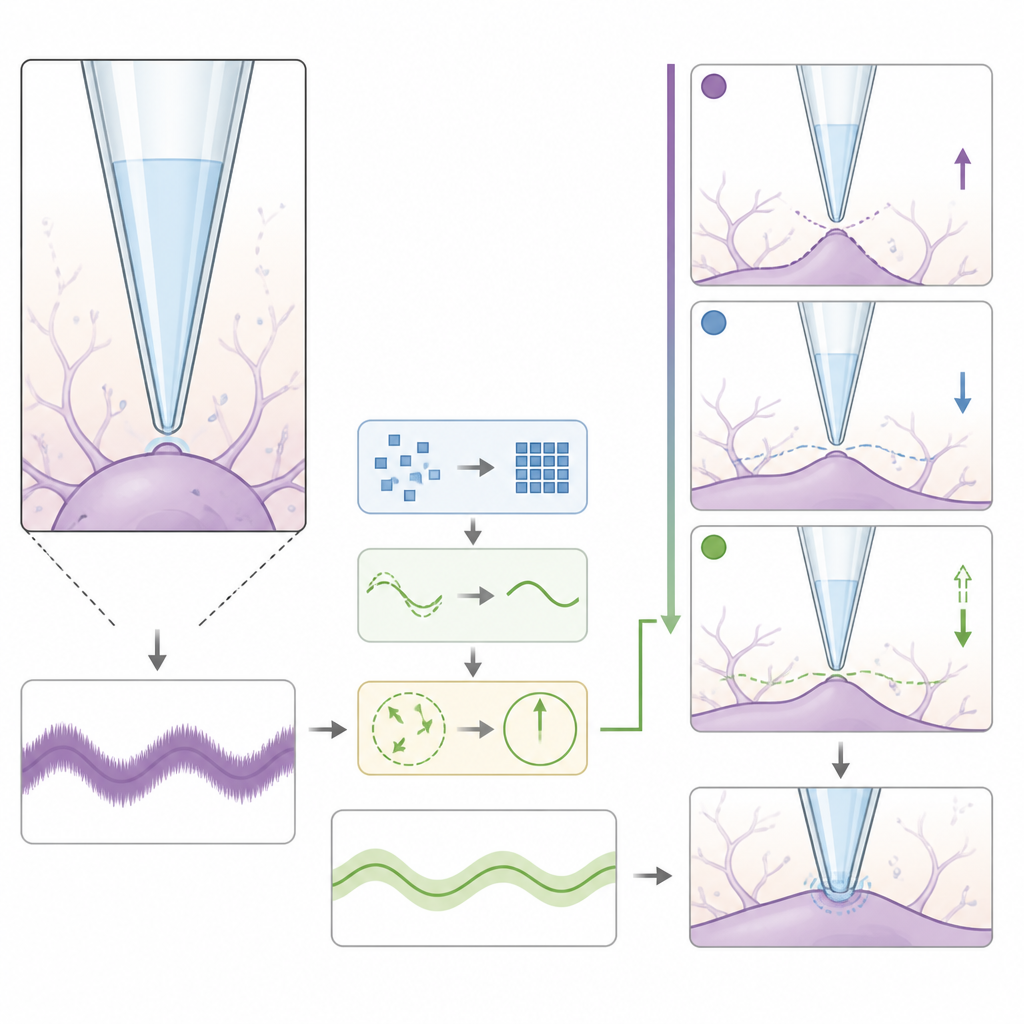
De ruis filteren en celbeweging volgen
In een levend brein is het weerstandssignaal ruisig en vermengd met ritmische schommelingen door hartslag en ademhaling. Om celbeweging in realtime schoon te volgen, ontwierpen de auteurs een aangepaste filtermethode die adaptieve frequentietracking combineert met een Kalman-filter. Deze methode scheidt de twee belangrijkste bewegingsritmes, volgt hun veranderende frequenties en reconstrueert een glad signaal zonder de timing te vervormen. In hersenplatenexperimenten, waarbij de pipet in gecontroleerde patronen werd bewogen om fysiologische beweging na te bootsen, kon het systeem de werkelijke pipet-tot-celafstand schatten met fouten onder een halve micrometer. Die nauwkeurigheid is voldoende om veilig de laatste paar micrometers te beheersen die bepalen of er een stabiele afdichting of een gescheurd membraan ontstaat.
Het beste moment kiezen om te hechten
Met beweging in realtime gevolgd vroeg het team vervolgens wanneer, binnen elke bewegingscyclus, de pipet het beste de cel kan aanraken. Ze vergeleken vier timingstrategieën en vonden dat mikken op het verste punt van de cel ten opzichte van de pipet het beste werkte. Op dat keerpunt staat de cel kort stil en beweegt daarna terug naar de pipet, wat een langere periode van zachte aanraking oplevert die de vorming van een afdichting bevordert. Bij geënte muizen leverden captures in deze fase afdichtingsweerstanden op de orde van miljarden ohm op, tot 55 keer hoger dan bij minder gunstige timingen. Tests toonden ook aan dat bescheiden extra indrukking veroorzaakt door aanhoudende beweging na contact de cellen niet beschadigde of stabiele opnames verhinderde.
Robots die in meerdere diersoorten opnemen
Al deze elementen werden geïntegreerd in een robotisch patch-clamp-platform dat pipetbeweging, druk en data-acquisitie via een verenigde interface aanstuurt. Bij muizen detecteerde het systeem in meer dan 90 procent van de pogingen nabijgelegen cellen en vormde het in ongeveer 82 procent van die gevallen hoogwaardige afdichtingen, een duidelijke verbetering ten opzichte van eerdere robotmethoden. Het werkte vergelijkbaar goed op oppervlakkige en diepe locaties, tot ongeveer één millimeter onder het hersenoppervlak. De onderzoekers toonden vervolgens aan dat hetzelfde raamwerk kan worden toegepast op ratten en op prachtmaki’s (marmosets), inclusief ontwakende dieren, door hun onderscheidende hartslag- en ademhalingspatronen uit weerstandveranderingen te lezen en de benadering dienovereenkomstig te timen.
Wat dit betekent voor hersenonderzoek
Voor niet-specialisten is de kernboodschap dat dit werk een delicaat ambacht verandert in een meer herhaalbaar, geautomatiseerd proces. Door te voelen hoe ver de pipet van een bewegend neuron verwijderd is en te slaan in de meest vergevingsgezinde fase van zijn beweging, maakt het systeem het gemakkelijker om stabiele, langdurige opnames van individuele cellen in vele hersengebieden en diersoorten te verkrijgen. Dit zal neurowetenschappers helpen schonere data te verzamelen over hoe neuronen zich gedragen tijdens normale activiteit en ziekte, en kan uiteindelijk andere single-cell-procedures ondersteunen die nauwkeurig, zacht contact in het levende brein vereisen.
Bronvermelding: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Trefwoorden: patch clamp, neuronaal opnemen, hersenrobotica, in vivo elektrofysiologie, single-cell tracking