Clear Sky Science · de
Ein robotisches Patch‑Clamp‑System mit Echtzeit‑Lokalisierung und phasensynchroner Erfassung dynamischer in vivo‑Zellen mittels Mikropipetten‑Widerstandsmodellierung
Einzelne Gehirnzellen belauschen
Zu verstehen, wie einzelne Gehirnzellen miteinander kommunizieren, ist zentral, um Denken, Wahrnehmung und Erkrankungen zu erklären. Aber die winzigen elektrischen Signale einzelner Neuronen in einem lebenden, atmenden Tier aufzuzeichnen, ist wie versuchen, ein Mikrofon an ein sich bewegendes Ziel anzuschließen. Diese Studie stellt ein robotisches System vor, das diese verschobenen Zellen deutlich zuverlässiger verfolgen und erfassen kann und somit den Weg für routinemäßigere, präzisere Messungen tief im Gehirn öffnet.
Warum das Erfassen einer Zelle so schwierig ist
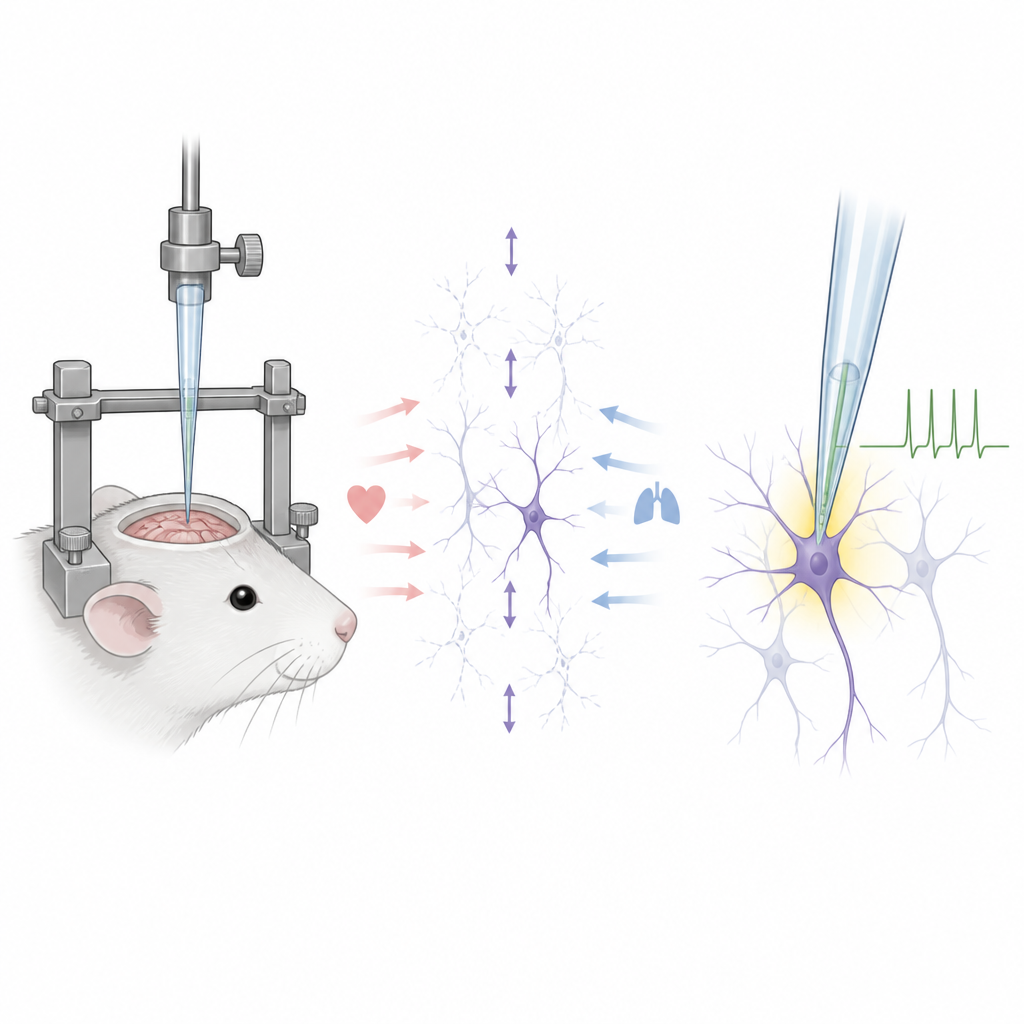
Patch‑Clamp‑Aufzeichnungen verwenden ein feines Glasröhrchen, eine Mikropipette, die sich sanft an ein Neuron abdichtet und Ströme in der Größenordnung eines Billionstels Ampere misst. In der Petrischale ist das anspruchsvoll, aber handhabbar. Im lebenden Gehirn jedoch wird die Zelle ständig durch Atmung und pulsierende Blutgefäße gestört. Selbst bei fester Kopffixierung und winzigen Schädelöffnungen bewegen sich Neuronen um mehrere Mikrometer, genug, damit die Pipette vorbeisegelt, die Zelle streift oder punktiert. Bestehende robotische Systeme navigieren entweder blind anhand grober elektrischer Hinweise oder sind auf Zwei‑Photonen‑Mikroskope angewiesen, die teuer, langsam beim Abtasten und auf flache Gewebetiefen beschränkt sind.
Elektrischen Widerstand in einen Distanzsensor verwandeln
Li und Kollegen gehen dieses Problem an, indem sie die Mikropipette nicht nur als Aufzeichnungsgerät, sondern als präzisen Entfernungsmesser behandeln. Da Gehirnflüssigkeit den Strom deutlich besser leitet als eine Zellmembran, steigt der elektrische Widerstand an der Pipettenspitze in vorhersagbarer Weise, je näher sie sich der Zelloberfläche nähert. Das Team entwickelte ein detailliertes physikalisches und rechnerisches Modell, das diesen Widerstand mit dem tatsächlichen Abstand zwischen Pipette und Membran verknüpft und Pipettenform, Flüssigkeitsströmung und die Verformung weichen Gewebes unter Druck berücksichtigt. Sie kalibrierten dieses Modell mit Finite‑Elemente‑Simulationen und sorgfältigen Messungen der Pipettengeometrie und zeigten anschließend, dass es sogar Schätzungen zur Steifigkeit unterschiedlicher Zellen und Oberflächen liefern kann.
Rauschen filtern und Zellbewegung verfolgen
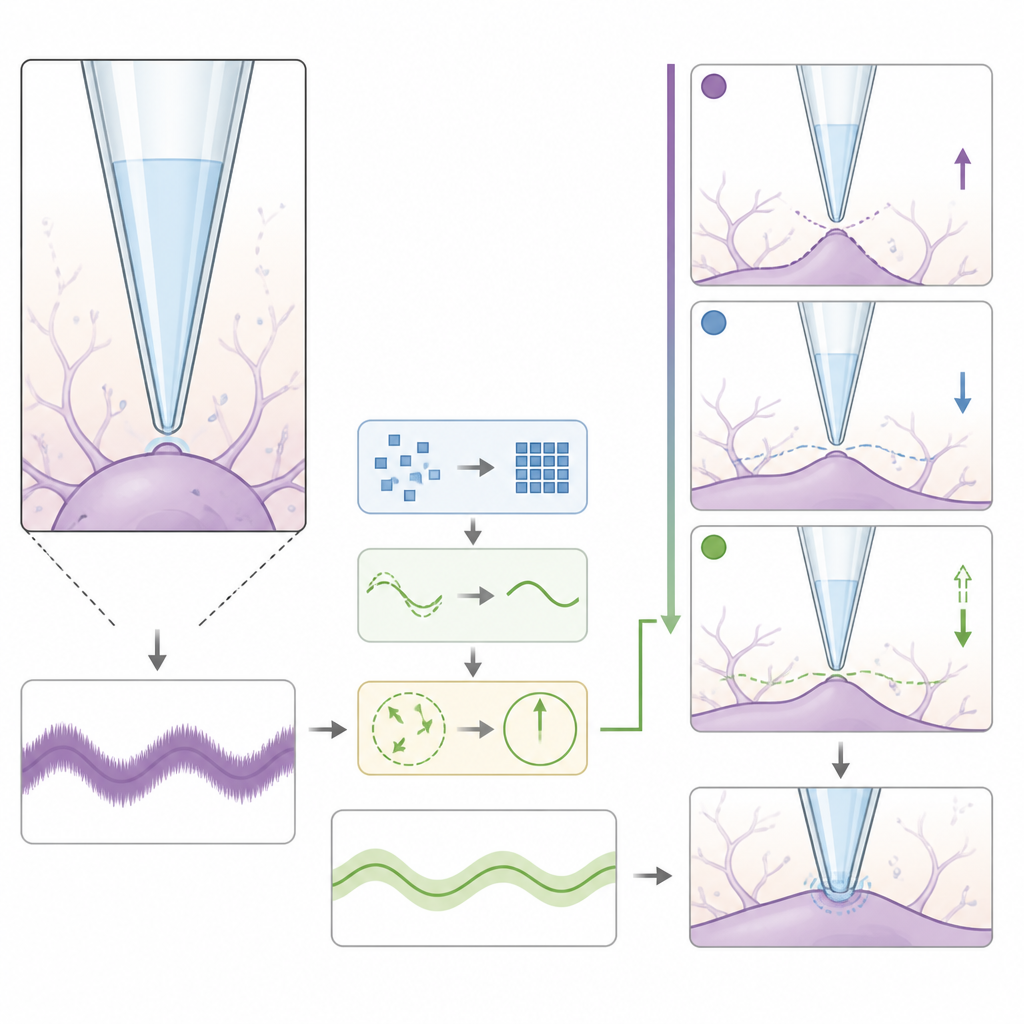
Im lebenden Gehirn ist das Widerstandssignal verrauscht und mit rhythmischen Schwankungen durch Herzschlag und Atmung überlagert. Um die Zellbewegung in Echtzeit sauber zu verfolgen, entwarfen die Autoren einen maßgeschneiderten Filteransatz, der adaptive Frequenzverfolgung mit einem Kalman‑Filter kombiniert. Diese Methode trennt die beiden Hauptbewegungsrhythmen, folgt ihren sich ändernden Frequenzen und rekonstruiert ein glattes Signal, ohne die Zeitverläufe zu verzerren. In Versuchen an Gehirnschnitten, bei denen die Pipette in kontrollierten Mustern bewegt wurde, um physiologische Bewegungen zu simulieren, konnte das System den tatsächlichen Pipetten‑zu‑Zell‑Abstand mit Fehlern unter einer halben Mikrometerschätzen. Diese Genauigkeit reicht aus, um die letzten wenigen Mikrometer sicher zu steuern, die darüber entscheiden, ob eine stabile Dichtung entsteht oder die Membran reißt.
Den besten Moment zum Abdichten wählen
Mit in Echtzeit verfolgter Bewegung untersuchten die Forscher, wann innerhalb jedes Bewegungszyklus die Pipette die Zelle berühren sollte. Sie verglichen vier Timing‑Strategien und stellten fest, dass das Anpeilen desjenigen Zeitpunkts, an dem sich die Zelle am weitesten von der Pipette entfernt, am besten funktioniert. An diesem Wendepunkt hält die Zelle kurz an und bewegt sich dann zurück zur Pipette, was eine längere Phase sanften Kontakts erlaubt, die die Ausbildung einer Dichtung begünstigt. Bei betäubten Mäusen ergaben Erfassungen in dieser Phase Dichtungswiderstände in der Größenordnung von Gigaohm, bis zu 55‑mal höher als bei ungünstigeren Zeitpunkten. Tests zeigten außerdem, dass moderate zusätzliche Eindrücke durch fortlaufende Bewegung nach dem Kontakt die Zellen nicht schädigen und keine stabilen Aufzeichnungen verhindern.
Roboter‑Aufzeichnungen über Arten hinweg
All diese Elemente wurden in eine robotische Patch‑Clamp‑Plattform integriert, die Pipettenbewegung, Druck und Datenerfassung über eine einheitliche Schnittstelle steuert. Bei Mäusen erkannte das System nahegelegene Zellen in über 90 Prozent der Versuche und bildete in etwa 82 Prozent dieser Fälle hochwertige Dichtungen — eine deutliche Verbesserung gegenüber früheren robotischen Methoden. Es funktionierte gleichermaßen gut in flachen und tiefen Regionen bis etwa einem Millimeter unter der Gehirnoberfläche. Die Forscher zeigten außerdem, dass dasselbe Konzept auf Ratten und Marmoset‑Affen anwendbar ist, auch bei wachen Tieren, indem sie deren unterschiedliche Herz‑ und Atemmuster aus den Widerstandsänderungen auslasen und die Annäherung entsprechend zeitlich abstimmten.
Was das für die Hirnforschung bedeutet
Für Nicht‑Spezialisten lautet die Kernbotschaft, dass diese Arbeit eine filigrane Kunst in einen besser wiederholbaren, automatisierten Prozess verwandelt. Indem das System misst, wie weit die Pipette von einem sich bewegenden Neuron entfernt ist, und im nachgiebigsten Moment seines Bewegungszyklus zuschlägt, erleichtert es das Erhalten stabiler, lang anhaltender Aufzeichnungen von Einzelzellen in vielen Hirnregionen und Arten. Das sollte Neurowissenschaftlern helfen, sauberere Daten über das Verhalten von Neuronen bei normaler Aktivität und bei Erkrankungen zu gewinnen, und könnte letztlich auch andere Einzelzellverfahren unterstützen, die präzisen, schonenden Kontakt im lebenden Gehirn erfordern.
Zitation: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Schlüsselwörter: Patch‑Clamp, Neuron‑Aufzeichnung, Gehirnrobotik, in vivo Elektrophysiologie, Einzelzell‑Tracking