Clear Sky Science · tr
Hücre-mikropipet direnç modellemesi kullanarak gerçek zamanlı yerelleştirme ve faz-senkron yakalama ile dinamik in vivo hücrelerin robotik patch-clamp sistemi
Tek Beyin Hücrelerini Dinlemek
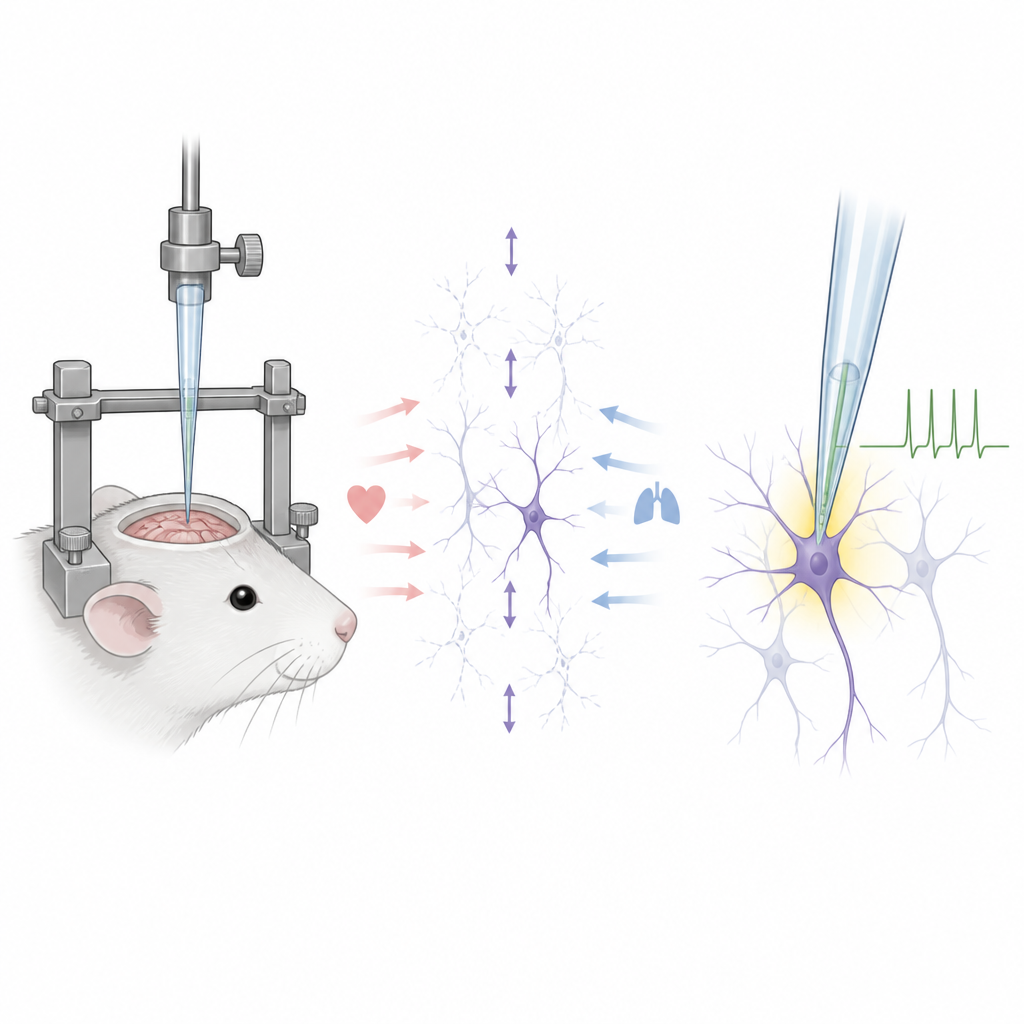
Bireysel beyin hücrelerinin birbirleriyle nasıl iletişim kurduğunu anlamak, düşünceyi, algıyı ve hastalıkları açıklamak için kilit önemdedir. Ancak canlı, nefes alan bir hayvanda tek nöronların çok küçük elektrik sinyallerini kaydetmek, hareket halindeki bir hedefe mikrofon takmaya çalışmaya benzer. Bu çalışma, bu hareketli hücreleri çok daha güvenilir biçimde izleyip yakalayabilen bir robotik sistemi tanıtıyor; bu da beynin derinliklerinde daha rutin ve hassas ölçümlere kapı açıyor.
Bir Hücreyi Yakalamayı Bu Kadar Zorlaştıran Nedir
Patch-clamp kaydı, mikropipet adı verilen ince bir cam tüpün nörona nazikçe yapıştırılması ve trilyonda bir amper düzeyindeki akımların ölçülmesiyle yapılır. Laboratuvar kabında bu zorlayıcı ama yönetilebilirdir. Canlı bir beynin içinde ise hücre, solunum ve nabız atımıyla sürekli sallanır. Sert kafa sabitlemesi ve kafatasında küçük açıklıklar olsa bile nöronlar birkaç mikrometre hareket eder; bu da pipetin hücreyi ıskalayacak, sürtecek veya delmesine yol açacak kadar fazladır. Mevcut robotik sistemler ya kaba elektriksel ipuçlarıyla körü körüne yönleniyor ya da pahalı, taraması yavaş ve yüzeye yakın doku ile sınırlı iki-foton mikroskoplara dayanıyor.
Elektriksel Direnci Bir Mesafe Sensörüne Dönüştürmek
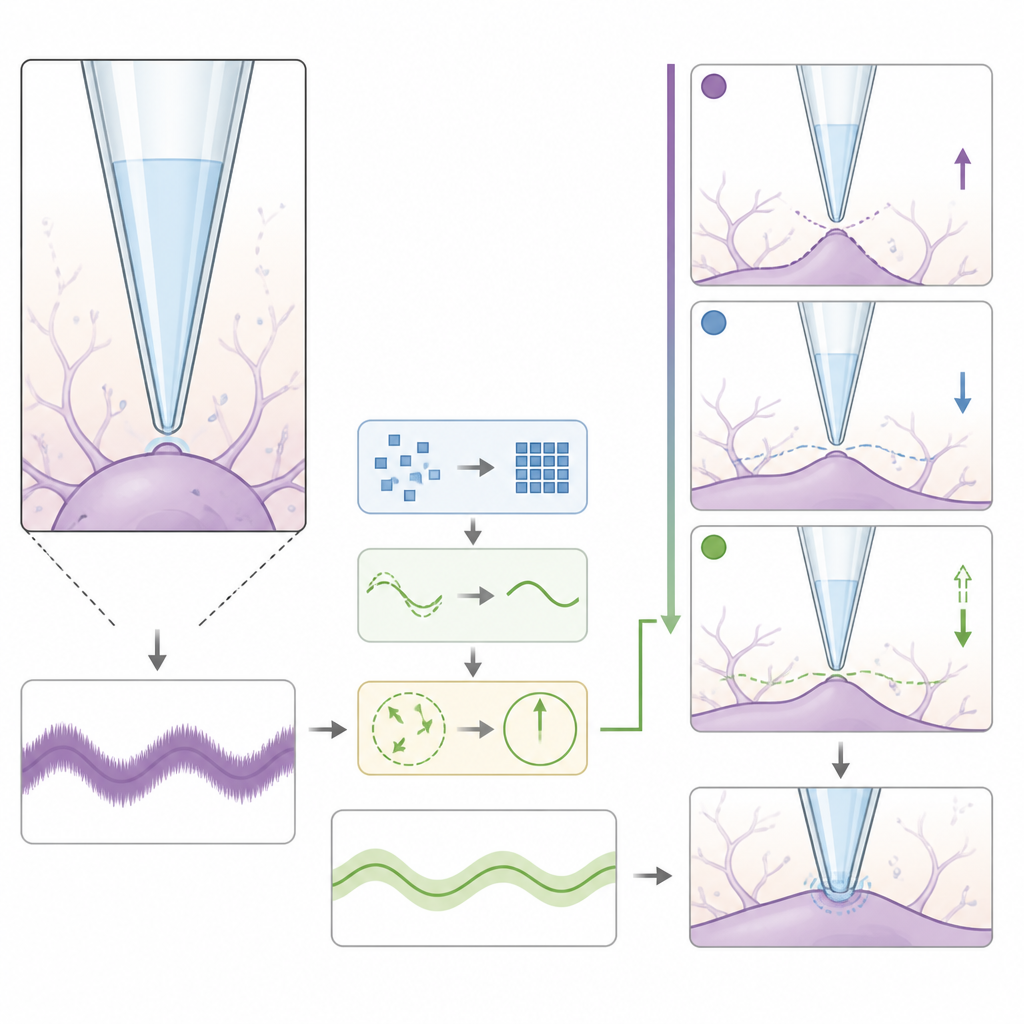
Li ve meslektaşları bu sorunu, mikropipeti yalnızca bir kayıt cihazı olarak değil, hassas bir uzaklıkölçer olarak ele alarak çözüyor. Beyin sıvısı hücre zarından çok daha iyi elektrik ilettiği için, pipet ucundaki elektriksel direnç, pipet hücre yüzeyine yaklaştıkça öngörülebilir bir şekilde artar. Ekip, bu direnci pipet ile zar arasındaki gerçek mesafeye bağlayan ayrıntılı bir fiziksel ve bilgisayar modeli geliştirdi; pipet şekli, sıvı akışı ve yumuşak dokunun basınç altında nasıl deforme olduğu gibi etkenleri hesaba kattılar. Bu modeli sonlu eleman simülasyonları ve pipet geometrisinin dikkatli ölçümleriyle kalibre ettiler ve bunun farklı hücre ve yüzeylerin sertliğini bile tahmin edebildiğini doğruladılar.
Gürültüyü Filtreleme ve Hücre Hareketini İzleme
Canlı bir beyinde direnç sinyali gürültülü olup kalp atışı ve solunumdan kaynaklanan ritmik dalgalanmalarla karışır. Hücre hareketini gerçek zamanlı olarak temiz biçimde izlemek için yazarlar, uyarlanabilir frekans takibi ile Kalman filtresini birleştiren özel bir filtreleme yaklaşımı tasarladılar. Bu yöntem iki ana hareket ritmini ayırır, değişen frekanslarını izler ve zamanlamayı bozmayacak şekilde düzgün bir sinyal yeniden inşa eder. Pipetin fizyolojik hareketleri taklit edecek kontrollü desenlerde hareket ettirildiği beyin dilimi deneylerinde, sistem pipet ile hücre arasındaki gerçek mesafeyi yarım mikrometrenin altında hatayla tahmin edebildi. Bu doğruluk, kararlı bir sızdırmazlık (seal) ya da yırtılmış bir zar arasındaki son birkaç mikrometreyi güvenle kontrol etmek için yeterlidir.
Sızdırmazlık İçin En İyi Anı Seçmek
Hareket gerçek zamanda izlendiğinde, ekip pipetin hücreye hangi aşamada dokunması gerektiğini sorguladı. Dört zamanlama stratejisini karşılaştırdılar ve pipetin en uzak olduğu, yani hücrenin pipetten en uzak noktada olduğu zamana hedeflemenin en iyi sonucu verdiğini buldular. Bu dönüm noktasında hücre kısa süreliğine duraklar ve sonra pipete doğru geri hareket eder; bu da daha uzun süren nazik bir temas periyodu sağlayarak seal oluşumunu kolaylaştırır. Anestezili farelerde, bu fazda yapılan yakalamalar milyar ohm mertebesinde seal dirençleri üretti; bu, daha az uygun zamanlamalara kıyasla 55 kata kadar daha yüksek oldu. Testler ayrıca, temas sonrası devam eden hareketin neden olduğu makul ek içine gömülmenin hücrelere zarar vermediğini veya kararlı kayıtları engellemediğini gösterdi.
Farklı Türlerde Kayıt Yapan Robotlar
Tüm bu bileşenler, pipet hareketini, basıncı ve veri edinimini tek bir arayüzle kontrol eden robotik bir patch-clamp platformuna entegre edildi. Farelerde sistem, denemelerin yüzde 90'ından fazlasında yakın hücreleri tespit etti ve bu tespitlerin yaklaşık yüzde 82'sinde yüksek kaliteli seal'ler oluşturdu; bu, önceki robotik yöntemlere kıyasla belirgin bir iyileşme. Sistem, yüzeye yakın ve yaklaşık bir milimetreye kadar derin bölgelerde benzer şekilde iyi çalıştı. Araştırmacılar ayrıca aynı çerçevenin, direnç değişikliklerinden farklı kalp atışı ve solunum desenlerini okuyup yaklaşımı ona göre zamanlayarak sıçanlar ve marmoset maymunları dahil uyanık hayvanlarda da uygulanabileceğini gösterdiler.
Bu Çalışmanın Beyin Araştırmalarına Etkisi
Uzman olmayanlar için temel mesaj şudur: bu çalışma hassas bir sanatı daha tekrar edilebilir, otomatik bir sürece dönüştürüyor. Pipetin hareketli bir nörondan ne kadar uzak olduğunu algılayıp hareketinin en affedici fazında saldırarak, sistem birçok beyin bölgesinde ve türde tek hücrelerden kararlı, uzun süreli kayıtlar elde etmeyi kolaylaştırıyor. Bu, sinirbilimcilerin nöronların normal aktivite ve hastalık sırasında nasıl davrandığına dair daha temiz veriler toplamasına yardımcı olacak ve nihayetinde canlı beyin içinde hassas, nazik temas gerektiren diğer tek hücre prosedürlerini destekleyebilir.
Atıf: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Anahtar kelimeler: patch clamp, nöron kaydı, beyin robotikleri, in vivo elektrofizyoloji, tek-hücre izleme