Clear Sky Science · es
Un sistema robótico de patch-clamp con localización en tiempo real y captura sincronizada por fase de células dinámicas in vivo mediante modelado de la resistencia de micropipetas
Escuchando células cerebrales individuales
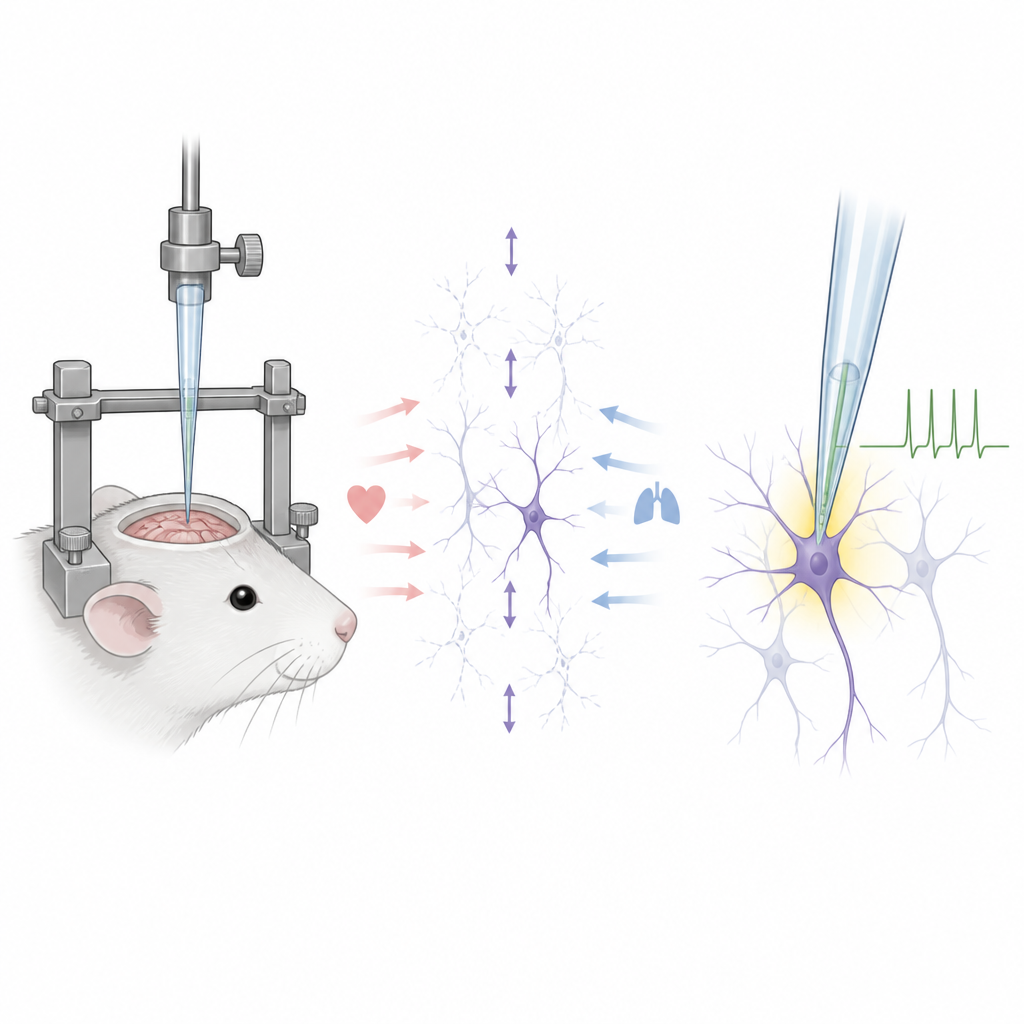
Comprender cómo las células cerebrales individuales se comunican entre sí es clave para explicar el pensamiento, la percepción y las enfermedades. Pero registrar las pequeñas señales eléctricas de neuronas individuales en un animal vivo y respirando es como intentar enchufar un micrófono a un blanco en movimiento. Este estudio presenta un sistema robótico que puede rastrear y capturar estas células cambiantes con mucha más fiabilidad, abriendo la puerta a mediciones más rutinarias y precisas en lo profundo del cerebro.
Por qué es tan difícil atrapar una célula
La técnica de patch clamp utiliza un fino tubo de vidrio, llamado micropipeta, para sellarse suavemente sobre una neurona y medir corrientes del orden de un billonésimo de amperio. En una placa de laboratorio esto es exigente pero manejable. Sin embargo, dentro de un cerebro vivo la célula está constantemente sacudida por la respiración y los vasos sanguíneos pulsantes. Incluso con una fijación rígida de la cabeza y pequeñas aberturas en el cráneo, las neuronas se desplazan varios micrómetros, suficiente para que la pipeta falle, roce o perforé la célula. Los sistemas robóticos existentes o bien navegan a ciegas con indicios eléctricos toscos o dependen de microscopios de dos fotones que son caros, lentos para escanear y están limitados a tejidos superficiales.
Convertir la resistencia eléctrica en un sensor de distancia
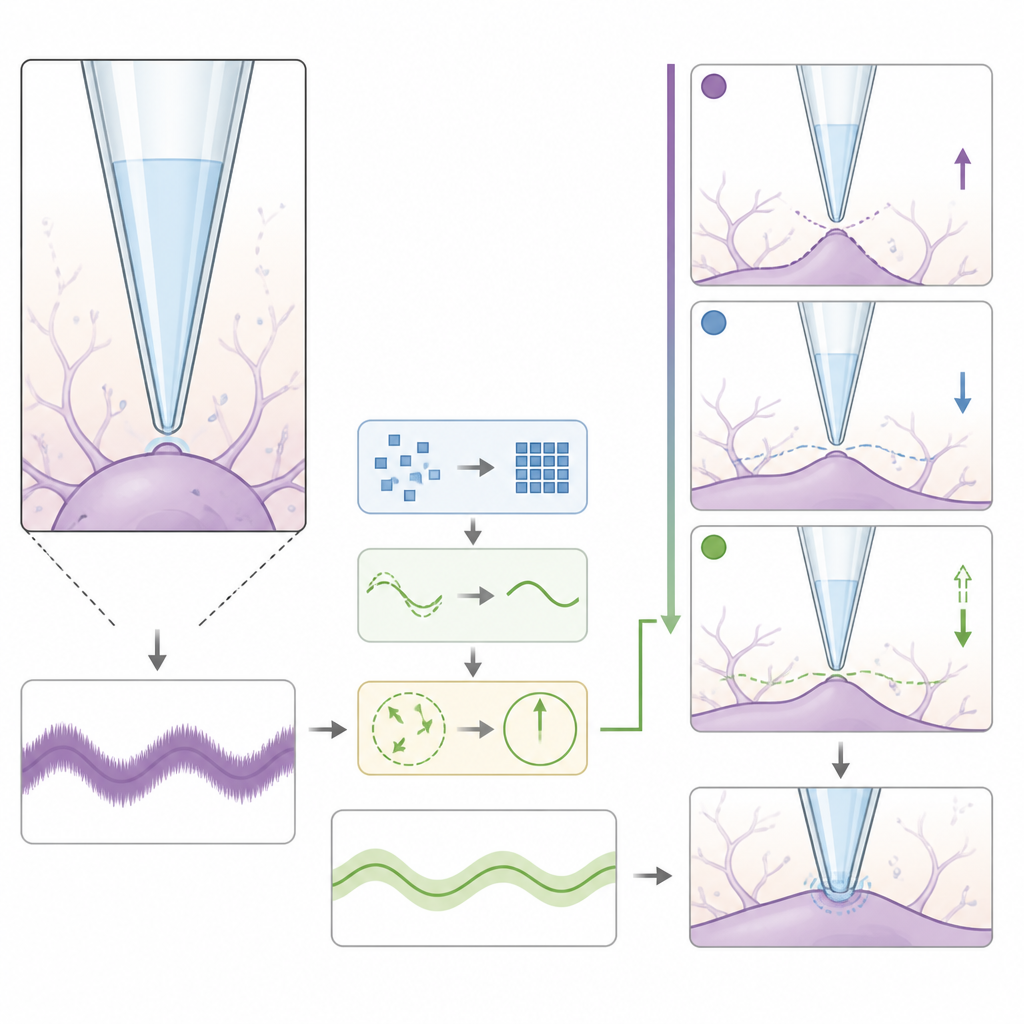
Li y colaboradores abordan este problema tratando la micropipeta no solo como un registrador, sino como un buscador de distancias preciso. Dado que el fluido cerebral conduce la electricidad mucho mejor que la membrana celular, la resistencia eléctrica en la punta de la pipeta aumenta de forma predecible a medida que se aproxima a la superficie celular. El equipo construyó un modelo físico y computacional detallado que vincula esa resistencia con la distancia real entre la pipeta y la membrana, teniendo en cuenta la forma de la pipeta, el flujo de fluido y la forma en que el tejido blando se deforma bajo presión. Calibraron este modelo mediante simulaciones por elementos finitos y mediciones cuidadosas de la geometría de la pipeta, y luego confirmaron que incluso puede estimar cuán rígidas son distintas células y superficies.
Filtrar el ruido y seguir el movimiento celular
En un cerebro vivo, la señal de resistencia es ruidosa y está mezclada con fluctuaciones rítmicas del latido cardíaco y la respiración. Para rastrear limpiamente el movimiento celular en tiempo real, los autores diseñaron un enfoque de filtrado personalizado que combina seguimiento adaptativo de frecuencia con un filtro de Kalman. Este método separa los dos ritmos principales del movimiento, sigue sus frecuencias cambiantes y reconstruye una señal suave sin distorsionar el cronometraje. En experimentos con cortes cerebrales, donde la pipeta se movió en patrones controlados para imitar el movimiento fisiológico, el sistema pudo estimar la distancia real pipeta-célula con errores por debajo de medio micrómetro. Esta precisión es suficiente para controlar de forma segura los últimos micrómetros que deciden si se forma un sellado estable o si la membrana se rasga.
Elegir el mejor momento para sellar
Con el movimiento rastreado en tiempo real, el equipo se planteó cuándo, dentro de cada ciclo de movimiento, la pipeta debería tocar la célula. Compararon cuatro estrategias de sincronización y hallaron que apuntar al punto más alejado de la célula respecto a la pipeta daba mejores resultados. En ese punto de inflexión la célula hace una pausa breve y luego se mueve de vuelta hacia la pipeta, proporcionando un período más largo de contacto suave que favorece la formación del sello. En ratones anestesiados, las capturas en esta fase produjeron resistencias de sello del orden de miles de millones de ohmios, hasta 55 veces mayores que con sincronizaciones menos favorables. Las pruebas también demostraron que una modesta indentación adicional causada por el movimiento continuo después del contacto no dañaba las células ni impedía grabaciones estables.
Robots grabando en varias especies
Todos estos elementos se integraron en una plataforma robótica de patch-clamp que controla el movimiento de la pipeta, la presión y la adquisición de datos a través de una interfaz unificada. En ratones, el sistema detectó células cercanas en más del 90 por ciento de los intentos y formó sellos de alta calidad en aproximadamente el 82 por ciento de esos casos, una mejora clara respecto a métodos robóticos anteriores. Funcionó de manera similar bien en sitios superficiales y profundos, hasta alrededor de un milímetro bajo la superficie cerebral. Los investigadores mostraron también que el mismo marco puede aplicarse a ratas y a monos tití marmosete, incluidos animales despiertos, leyendo sus patrones distintivos de latido y respiración a partir de los cambios de resistencia y temporizando el acercamiento en consecuencia.
Qué significa esto para la investigación cerebral
Para un público no especialista, el mensaje central es que este trabajo convierte un arte delicado en un proceso más reproducible y automatizado. Al detectar a qué distancia está la pipeta de una neurona en movimiento y actuar en la fase más favorable de su movimiento, el sistema facilita obtener grabaciones estables y duraderas de células individuales en muchas regiones cerebrales y especies. Esto debería ayudar a los neurocientíficos a recopilar datos más nítidos sobre cómo se comportan las neuronas durante la actividad normal y la enfermedad, y podría en última instancia respaldar otros procedimientos a nivel de célula única que requieren un contacto preciso y suave dentro del cerebro vivo.
Cita: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Palabras clave: patch clamp, grabación de neuronas, robótica cerebral, electrofisiología in vivo, seguimiento de una sola célula