Clear Sky Science · fr
Un système robotisé de patch-clamp avec localisation en temps réel et capture synchronisée en phase des cellules dynamiques in vivo utilisant la modélisation de la résistance de la micropipette
Écouter une cellule cérébrale à la fois
Comprendre comment les cellules cérébrales individuelles dialoguent est essentiel pour expliquer la pensée, la perception et les maladies. Mais enregistrer les minuscules signaux électriques d’un neurone unique dans un animal vivant, en respiration, revient à essayer de brancher un microphone sur une cible en mouvement. Cette étude présente un système robotisé capable de suivre et d’attraper ces cellules mobiles avec une fiabilité bien supérieure, ouvrant la voie à des mesures plus systématiques et précises en profondeur dans le cerveau.
Pourquoi attraper une cellule est si difficile
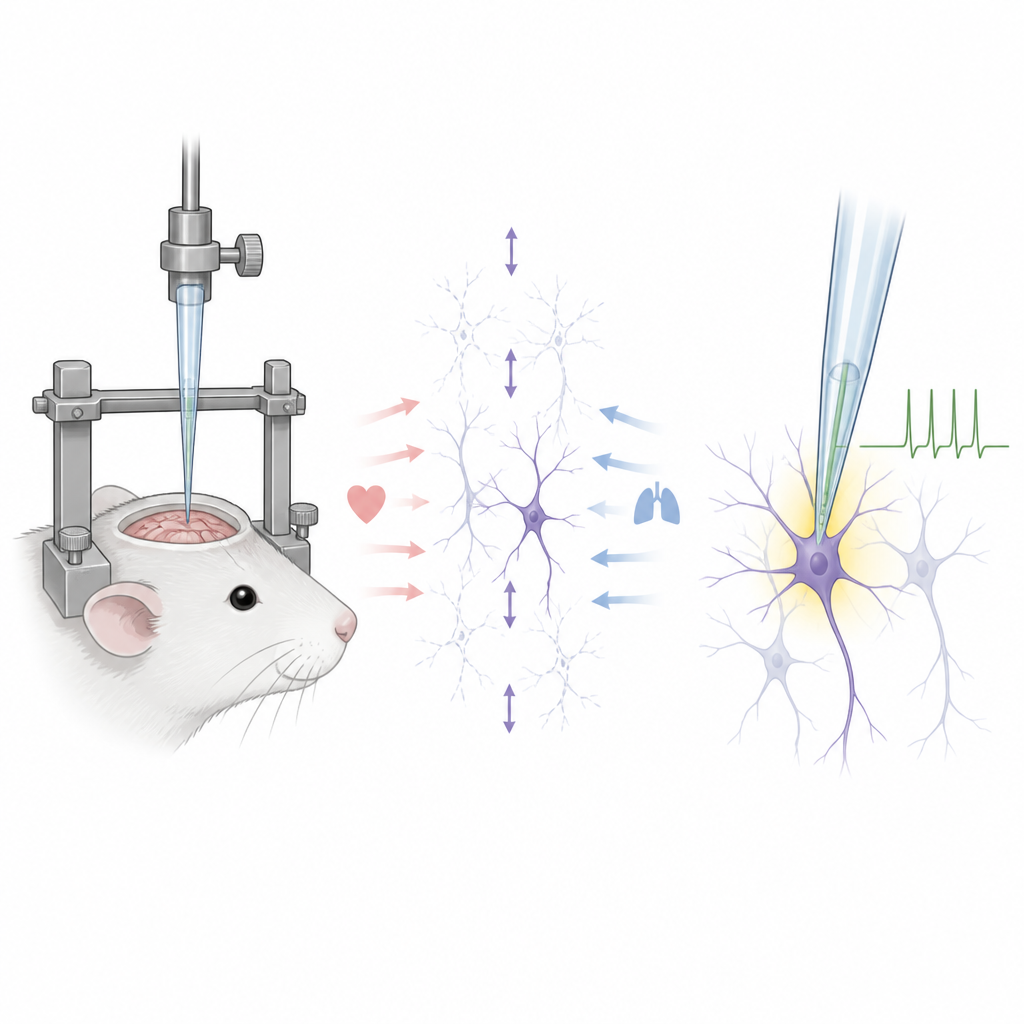
Le patch-clamp utilise un fin tube de verre, appelé micropipette, pour se sceller délicatement sur un neurone et mesurer des courants de l’ordre du trillionième d’ampère. En culture, c’est exigeant mais faisable. Dans un cerveau vivant, cependant, la cellule est constamment secouée par la respiration et les pulsations des vaisseaux. Même avec une fixation crânienne rigide et de petites ouvertures dans le crâne, les neurones se déplacent encore de plusieurs micromètres, suffisamment pour que la pipette rate la cellule, la frôle ou la perce. Les systèmes robotiques existants naviguent soit à l’aveugle à partir d’indices électriques grossiers, soit s’appuient sur des microscopes biphotoniques coûteux, lents à scanner et limités aux tissus superficiels.
Transformer la résistance électrique en capteur de distance
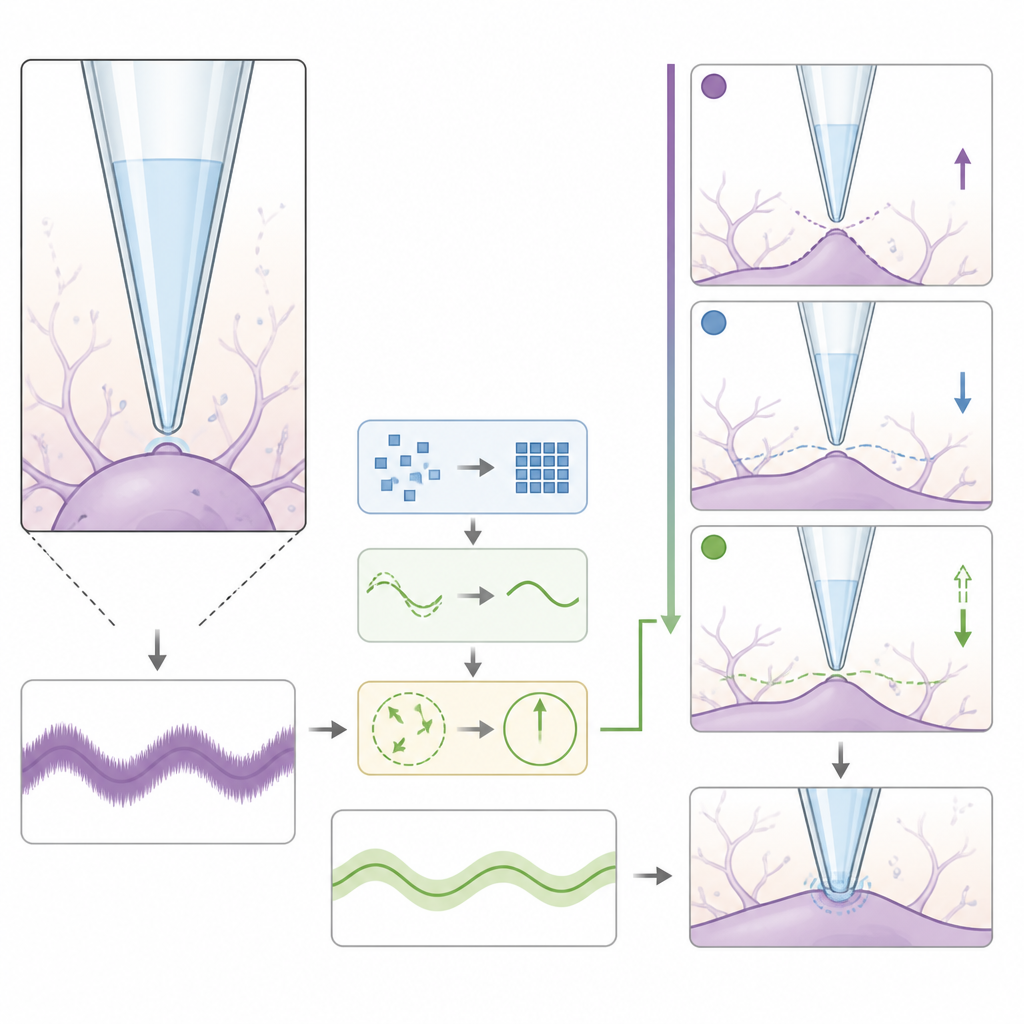
Li et ses collègues abordent ce problème en considérant la micropipette non seulement comme un enregistreur, mais comme un télémètre précis. Parce que le liquide cérébral conduit l’électricité bien mieux que la membrane cellulaire, la résistance électrique au niveau de l’extrémité de la pipette augmente de manière prévisible à mesure qu’elle s’approche de la surface cellulaire. L’équipe a construit un modèle physique et informatique détaillé qui relie cette résistance à la distance réelle entre la pipette et la membrane, en tenant compte de la forme de la pipette, de l’écoulement des fluides et de la déformation des tissus mous sous pression. Ils ont calibré ce modèle à l’aide de simulations par éléments finis et de mesures précises de la géométrie des pipettes, puis ont confirmé qu’il peut même estimer la rigidité de différentes cellules et surfaces.
Filtrer le bruit et suivre le mouvement des cellules
Dans un cerveau vivant, le signal de résistance est bruité et mêlé à des fluctuations rythmiques liées au battement cardiaque et à la respiration. Pour suivre proprement le mouvement des cellules en temps réel, les auteurs ont conçu une approche de filtrage personnalisée qui combine suivi adaptatif de fréquence et filtre de Kalman. Cette méthode sépare les deux rythmes principaux du mouvement, suit l’évolution de leurs fréquences et reconstruit un signal lisse sans déformer la temporalité. Dans des expériences sur tranches de cerveau, où la pipette était déplacée selon des motifs contrôlés pour imiter le mouvement physiologique, le système a pu estimer la distance réelle pipette–cellule avec des erreurs inférieures à un demi-micromètre. Cette précision suffit à contrôler en toute sécurité les derniers micromètres qui décident si l’on obtient un scellement stable ou une membrane déchirée.
Choisir le meilleur moment pour sceller
Avec le mouvement suivi en temps réel, l’équipe s’est alors demandé à quel moment de chaque cycle il fallait que la pipette touche la cellule. Ils ont comparé quatre stratégies de synchronisation et constaté que viser le point où la cellule est le plus éloignée de la pipette donnait les meilleurs résultats. À ce point de retournement, la cellule fait une brève pause puis revient vers la pipette, offrant une période de contact plus longue et plus douce qui favorise la formation du scellement. Chez la souris anesthésiée, les captures réalisées à cette phase ont produit des résistances de scellement de l’ordre du gigaohm, jusqu’à 55 fois supérieures aux synchronisations moins favorables. Les tests ont également montré que de modestes indentations supplémentaires causées par le mouvement continu après le contact n’endommageaient pas les cellules ni n’empêchaient des enregistrements stables.
Des robots qui enregistrent chez plusieurs espèces
Tous ces éléments ont été intégrés dans une plateforme robotisée de patch-clamp qui contrôle le mouvement de la pipette, la pression et l’acquisition des données via une interface unifiée. Chez la souris, le système détectait des cellules à proximité dans plus de 90 % des tentatives et formait des scellements de haute qualité dans environ 82 % de ces cas, une nette amélioration par rapport aux méthodes robotiques antérieures. Il fonctionnait de façon similaire en sites superficiels et profonds, jusqu’à environ un millimètre sous la surface cérébrale. Les chercheurs ont ensuite montré que le même cadre peut s’appliquer au rat et au singe marmoset, y compris chez des animaux éveillés, en détectant leurs motifs cardiaques et respiratoires distincts à partir des variations de résistance et en synchronisant l’approche en conséquence.
Ce que cela signifie pour la recherche cérébrale
Pour les non-spécialistes, le message central est que ce travail transforme un art délicat en un procédé plus reproductible et automatisé. En détectant la distance entre la pipette et un neurone en mouvement et en frappant à la phase la plus favorable de son mouvement, le système facilite l’obtention d’enregistrements stables et durables de cellules uniques dans de nombreuses régions et espèces cérébrales. Cela devrait aider les neuroscientifiques à recueillir des données plus propres sur le comportement des neurones en activité normale et en pathologie, et pourrait ultimement soutenir d’autres procédures monoprotocellulaires nécessitant un contact précis et délicat dans le cerveau vivant.
Citation: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Mots-clés: patch clamp, enregistrement neuronal, robotique cérébrale, électrophysiologie in vivo, suivi monoprotocellulaire