Clear Sky Science · sv
En robotiserad patch-clamp‑plattform med realtidslokalisering och fasesynkroniserad fångst av dynamiska celler in vivo med hjälp av modellering av mikropipettresistans
Lyssna på enskilda hjärnceller
Att förstå hur individuella hjärnceller kommunicerar är avgörande för att förklara tanke, perception och sjukdom. Men att spela in de mycket svaga elektriska signalerna från enskilda neuroner i ett levande, andande djur är som att försöka plugga in en mikrofon i ett rörligt mål. Denna studie presenterar ett robotiserat system som kan spåra och fånga dessa skiftande celler med avsevärt större tillförlitlighet, vilket öppnar för mer rutinmässiga och precisa mätningar djupt inne i hjärnan.
Varför det är så svårt att fånga en cell
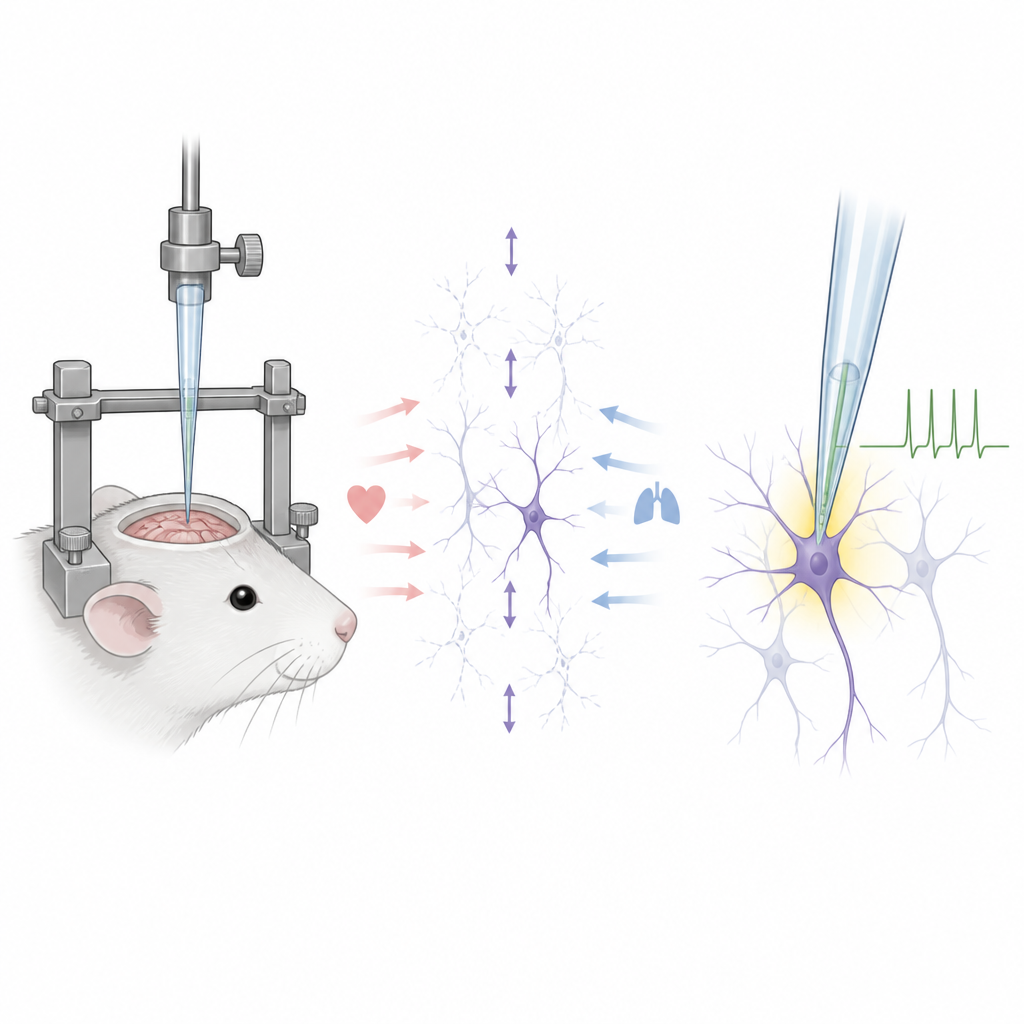
Patch‑clamp‑inspelning använder ett tunt glastråg, kallat mikropipett, för att försiktigt täta mot en neuron och mäta strömmar i storleksordningen en biljondel av en ampere. I en skåldesign är detta krävande men hanterbart. Inuti en levande hjärna rör sig dock cellen ständigt på grund av andning och pulserande blodkärl. Även med rigid huvudfixering och små öppningar i skallen rör sig neuroner flera mikrometer, tillräckligt för att pipetten ska missa, skrapa förbi eller punktera cellen. Befintliga robotsystem navigerar antingen blint utifrån grova elektriska ledtrådar eller förlitar sig på tvåfotonmikroskopi som är dyrt, långsamt att skanna och begränsat till ytliga vävnadsskikt.
Göra elektrisk resistans till en avståndssensor
Li och kollegor angriper problemet genom att betrakta mikropipetten inte bara som ett inspelningsverktyg utan som en precis avståndsmätare. Eftersom hjärnvätska leder elektricitet mycket bättre än ett cellmembran ökar den elektriska resistansen vid pipetttippen på ett förutsägbart sätt när den närmar sig cellens yta. Teamet byggde en detaljerad fysisk och datorbaserad modell som kopplar denna resistans till det verkliga avståndet mellan pipett och membran, och tar hänsyn till pipettens form, vätskeflöde och hur mjuk vävnad deformeras under tryck. De kalibrerade modellen med finita element‑simuleringar och noggranna mätningar av pipettgeometri, och bekräftade sedan att den till och med kan uppskatta hur styva olika celler och ytor är.
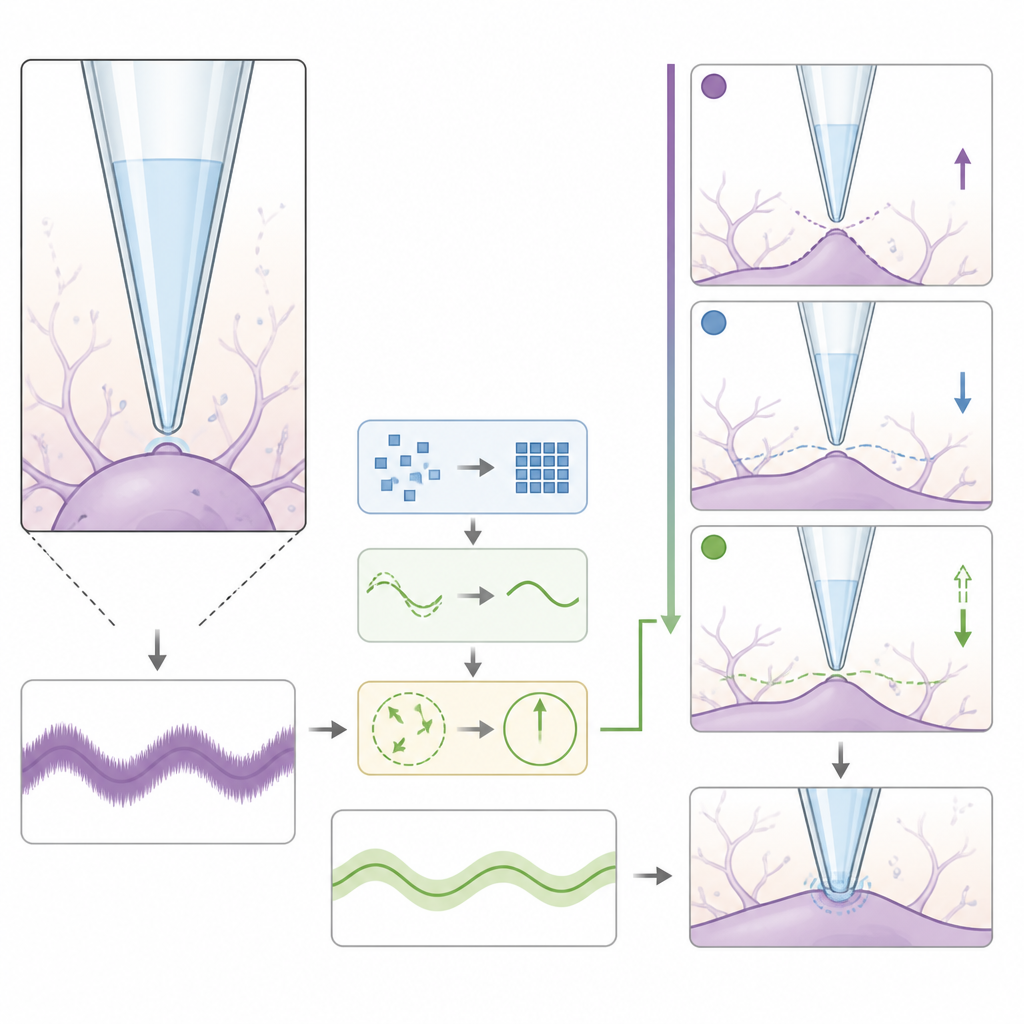
Filtrera bort brus och spåra cellrörelse
I en levande hjärna är resistanssignalen brusig och blandad med rytmiska fluktuationer från hjärtslag och andning. För att rent spåra cellrörelse i realtid designade författarna ett skräddarsytt filterförfarande som kombinerar adaptiv frekvensspårning med en Kalman‑filteransats. Denna metod separerar de två huvudsakliga rörelse rytmerna, följer deras förändrade frekvenser och rekonstruerar en jämn signal utan att förvränga tidpunkten. I försök på hjärnskivor, där pipetten förflyttades i kontrollerade mönster för att efterlikna fysiologisk rörelse, kunde systemet uppskatta det faktiska avståndet mellan pipett och cell med fel under en halv mikrometer. Denna noggrannhet räcker för att säkert styra de sista få mikrometrarna som avgör om en stabil tätning eller ett trasigt membran uppstår.
Välja bästa ögonblicket för tätning
När rörelsen spårats i realtid ställde teamet sedan frågan när, inom varje rörelsecykel, pipetten bör röra vid cellen. De jämförde fyra tidpunktsstrategier och fann att sikta på cellens punkt längst bort från pipetten gav bäst resultat. Vid denna vändpunkt pausar cellen kort och rör sig sedan tillbaka mot pipetten, vilket ger en längre period av mjuk kontakt som gynnar tätning. I sövda möss gav fångster vid denna fas tätningar med resistans i storleksordningen en miljard ohm, upp till 55 gånger högre än vid mindre gynnsamma tidpunkter. Tester visade också att måttlig extra inbuktning orsakad av fortsatt rörelse efter kontakt inte skadade cellerna eller förhindrade stabila inspelningar.
Robotar som spelar in över arter
Alla dessa element integrerades i en robotiserad patch‑clamp‑plattform som styr pipettrörelse, tryck och datafångst via ett enhetligt gränssnitt. Hos möss upptäckte systemet närliggande celler i över 90 procent av försöken och bildade högkvalitativa tätningar i cirka 82 procent av dessa fall, en tydlig förbättring jämfört med tidigare robotmetoder. Det fungerade lika bra i ytliga som i djupa områden, ned till ungefär en millimeter under hjärnans yta. Forskarna visade också att samma ramverk kan tillämpas på råttor och marmosetapor, även vakna djur, genom att avläsa deras karakteristiska hjärtslags‑ och andningsmönster från resistansförändringar och tajma ansatsen därefter.
Vad detta betyder för hjärnforskningen
För icke‑specialister är huvudbudskapet att detta arbete förvandlar en känslig konst till en mer upprepningsbar, automatiserad process. Genom att känna hur långt pipetten är från en rörlig neuron och slå till vid den mest förlåtande fasen av dess rörelse gör systemet det enklare att erhålla stabila, långvariga inspelningar från enskilda celler i många hjärnregioner och arter. Detta bör hjälpa neuroforskare att samla renare data om hur neuroner beter sig under normal aktivitet och vid sjukdom, och kan i förlängningen stödja andra enkla‑cellsprocedurer som kräver noggrann, skonsam kontakt inne i den levande hjärnan.
Citering: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Nyckelord: patch clamp, neuroninspelning, hjärnrobotik, in vivo elektrofysiologi, spårning av enskilda celler