Clear Sky Science · pt
Um sistema robótico de patch-clamp com localização em tempo real e captura sincronizada por fase de células dinâmicas in vivo usando modelagem da resistência da micropipeta
Ouvindo Células Cerebrais Individuais
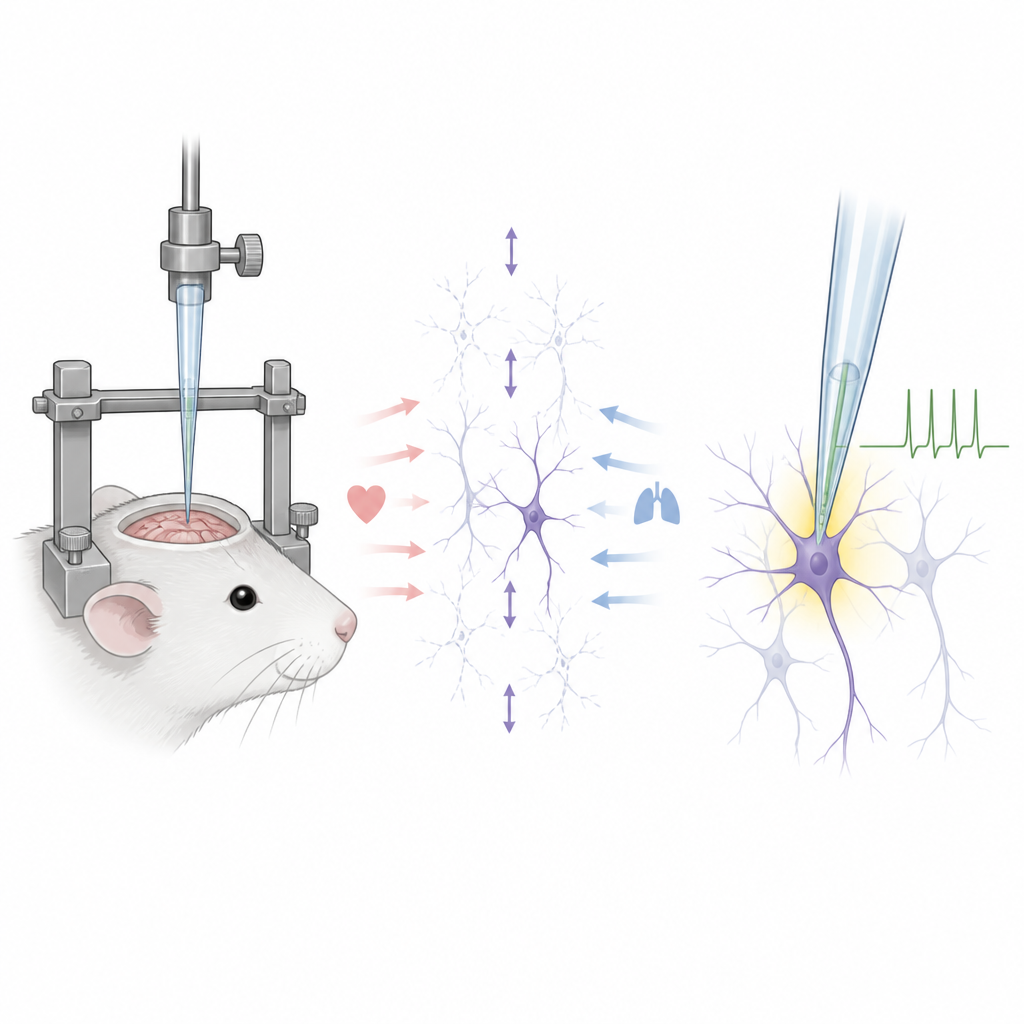
Entender como células cerebrais individuais se comunicam é crucial para explicar pensamento, percepção e doença. Mas registrar os minúsculos sinais elétricos de neurônios únicos em um animal vivo é como tentar encaixar um microfone em um alvo em movimento. Este estudo apresenta um sistema robótico capaz de rastrear e capturar essas células em movimento com muito mais confiabilidade, abrindo caminho para medições mais rotineiras e precisas em regiões profundas do cérebro.
Por Que Capturar Uma Célula É Tão Difícil
O registro por patch clamp usa um tubo de vidro fino, chamado micropipeta, para selar suavemente sobre um neurônio e medir correntes da ordem de um trilionésimo de ampere. Em placas de cultura isso é exigente, mas administrável. No cérebro vivo, entretanto, a célula é constantemente sacudida pela respiração e pelos vasos sanguíneos pulsantes. Mesmo com fixação rígida da cabeça e pequenas aberturas no crânio, os neurônios ainda se movem por vários micrômetros, o suficiente para a pipeta errar, raspar ou perfurar a célula. Sistemas robóticos existentes ou navegam às cegas a partir de pistas elétricas grosseiras ou dependem de microscópios de dois fótons, que são caros, lentos para varredura e limitados a tecidos rasos.
Transformando Resistência Elétrica em Sensor de Distância
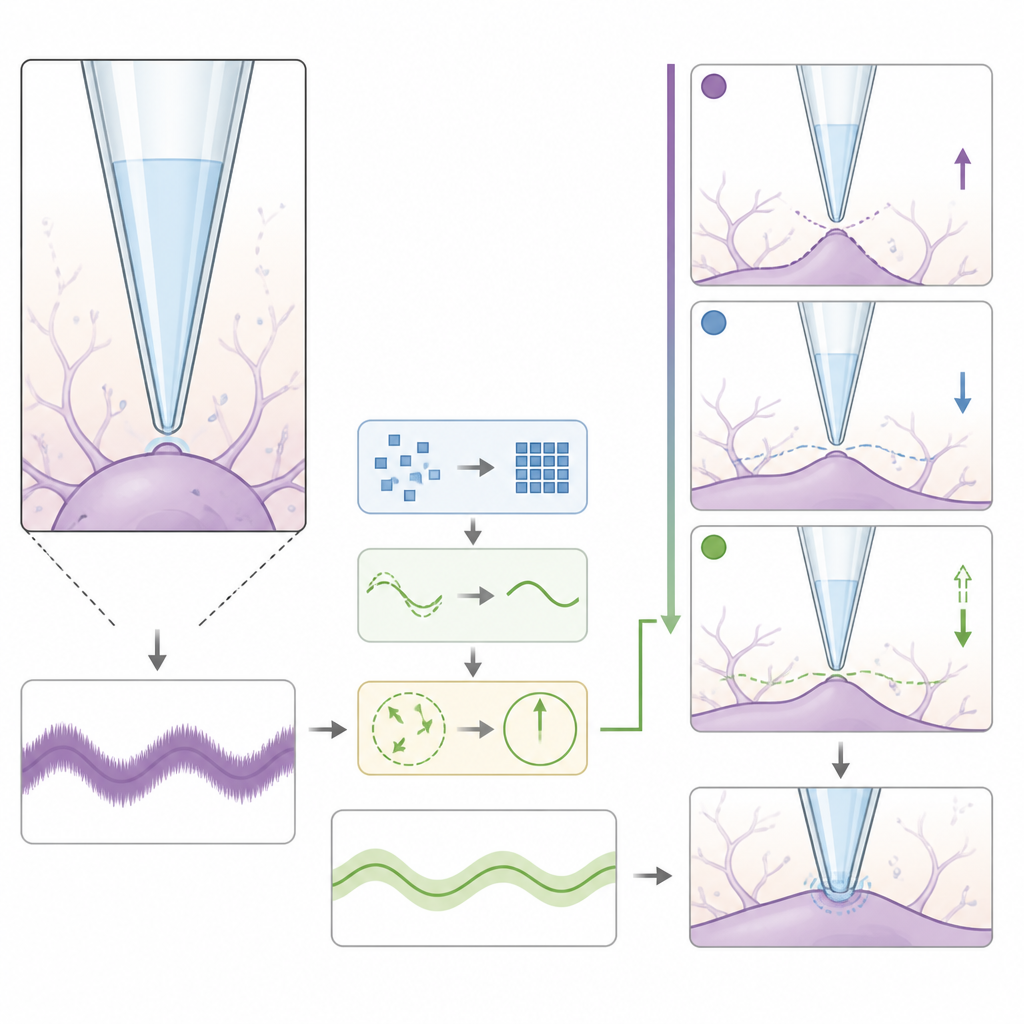
Li e colegas enfrentam esse problema tratando a micropipeta não apenas como um registrador, mas como um localizador preciso de distância. Porque o fluido cerebral conduz eletricidade muito melhor que a membrana celular, a resistência elétrica na ponta da pipeta aumenta de maneira previsível à medida que se aproxima da superfície celular. A equipe construiu um modelo físico e computacional detalhado que vincula essa resistência à distância real entre pipeta e membrana, levando em conta a forma da pipeta, o fluxo de fluido e a deformação do tecido mole sob pressão. Eles calibraram esse modelo usando simulações por elementos finitos e medições cuidadosas da geometria da pipeta, e então confirmaram que ele pode até estimar a rigidez de diferentes células e superfícies.
Filtrando o Ruído e Rastreando o Movimento Celular
No cérebro vivo, o sinal de resistência é ruidoso e misturado com flutuações rítmicas do batimento cardíaco e da respiração. Para rastrear o movimento celular em tempo real de forma limpa, os autores projetaram uma abordagem de filtragem personalizada que combina rastreamento adaptativo de frequência com um filtro de Kalman. Esse método separa os dois principais ritmos de movimento, segue suas frequências mutáveis e reconstrói um sinal suave sem distorcer o tempo. Em experimentos em fatias cerebrais, onde a pipeta foi movida em padrões controlados para imitar o movimento fisiológico, o sistema pôde estimar a distância real entre pipeta e célula com erros inferiores a meio micrômetro. Essa precisão é suficiente para controlar com segurança os poucos micrômetros finais que decidem se resulta um selo estável ou uma membrana rasgada.
Escolhendo o Melhor Momento para Selar
Com o movimento rastreado em tempo real, a equipe então investigou quando, dentro de cada ciclo de movimento, a pipeta deveria tocar a célula. Compararam quatro estratégias de temporização e descobriram que mirar no ponto mais afastado da célula em relação à pipeta funcionou melhor. Nesse ponto de inversão, a célula faz uma breve pausa e então se move de volta em direção à pipeta, oferecendo um período mais longo de contato suave que favorece a formação do selo. Em camundongos anestesiados, capturas nesse estágio produziram resistências de selo da ordem de um bilhão de ohms, até 55 vezes maiores do que em temporizações menos favoráveis. Testes também mostraram que uma ligeira indentação adicional causada pelo movimento contínuo após o contato não danificava as células nem impedia registros estáveis.
Robôs Gravando em Diferentes Espécies
Todos esses elementos foram integrados em uma plataforma robótica de patch-clamp que controla o movimento da pipeta, a pressão e a aquisição de dados por meio de uma interface unificada. Em camundongos, o sistema detectou células próximas em mais de 90% das tentativas e formou selos de alta qualidade em cerca de 82% desses casos, uma melhoria clara sobre métodos robóticos anteriores. Funcionou de forma semelhante em sítios rasos e profundos, até cerca de um milímetro abaixo da superfície cerebral. Os pesquisadores então demonstraram que a mesma estrutura pode ser aplicada a ratos e a saguis marmosets, incluindo animais acordados, ao ler seus distintos padrões de batimento cardíaco e respiração a partir das mudanças de resistência e cronometrar a aproximação de acordo.
O Que Isso Significa para a Pesquisa Cerebral
Para não especialistas, a mensagem central é que este trabalho transforma uma arte delicada em um processo mais repetível e automatizado. Ao perceber quão distante a pipeta está de um neurônio em movimento e intervir na fase mais favorável de seu movimento, o sistema facilita obter gravações estáveis e duradouras de células individuais em muitas regiões cerebrais e espécies. Isso deve ajudar neurocientistas a coletar dados mais limpos sobre como os neurônios se comportam durante atividade normal e em doenças, e pode, em última instância, apoiar outros procedimentos unicelulares que exigem contato preciso e suave dentro do cérebro vivo.
Citação: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Palavras-chave: patch clamp, registro de neurônios, robótica cerebral, eletrofisiologia in vivo, rastreamento unicelular