Clear Sky Science · ru
Роботизированная система патч-клампа с локализацией в реальном времени и фазосинхронизированным захватом динамических in vivo клеток с использованием моделирования сопротивления микропипетки
Подслушивание отдельных клеток мозга
Понимание того, как отдельные клетки мозга общаются друг с другом, ключ к объяснению мышления, восприятия и болезней. Но запись крошечных электрических сигналов отдельных нейронов в живом, дышащем животном похожа на попытку подключить микрофон к движущейся мишени. В этом исследовании представлена роботизированная система, которая может отслеживать и захватывать эти смещающиеся клетки с гораздо большей надёжностью, открывая путь к более рутинным и точным измерениям в глубине мозга.
Почему поймать клетку так сложно
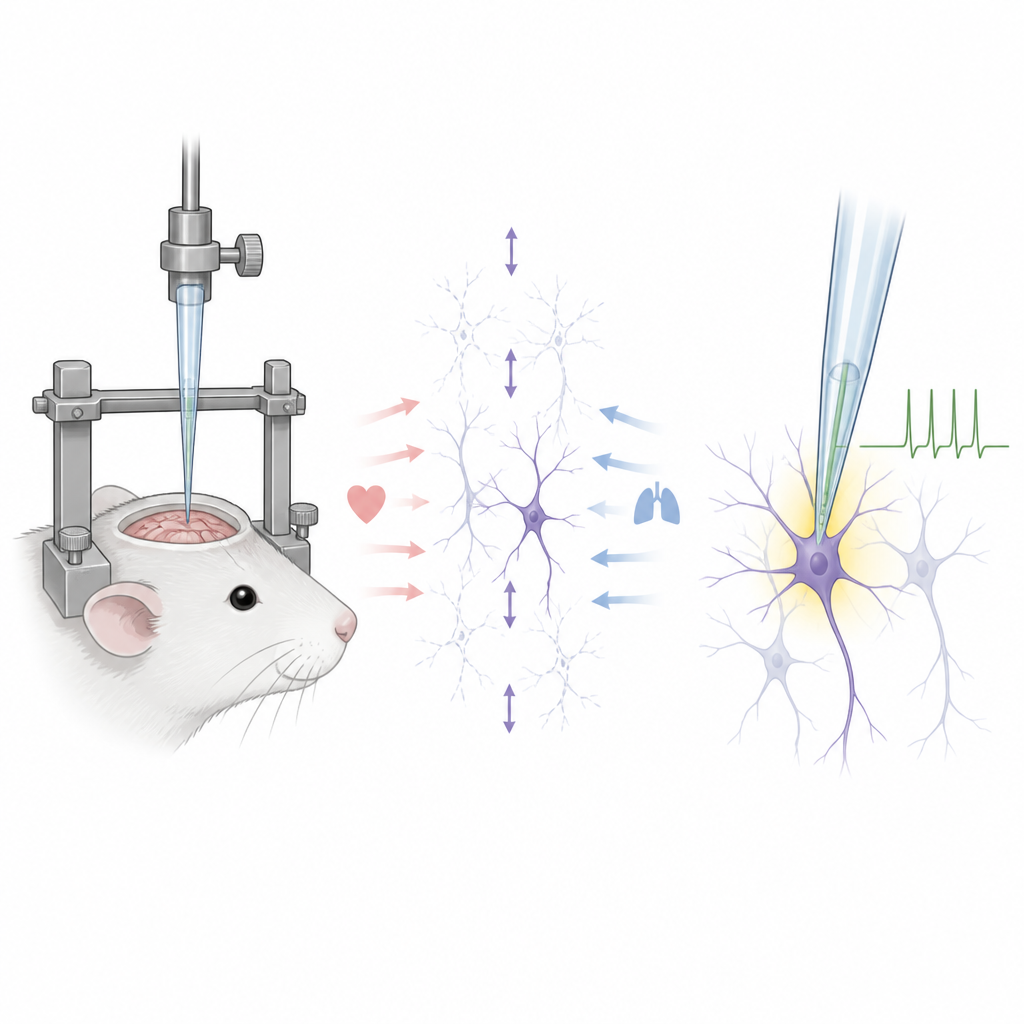
Патч-кламп использует тонкую стеклянную трубку — микропипетку — чтобы аккуратно запечатать мембрану нейрона и измерять токи размером в триллионные доли ампера. В лабораторной чашке это сложно, но выполнимо. В живом мозге клетка постоянно толкается из-за дыхания и пульсации сосудов. Даже при жёсткой фиксации головы и крошечных отверстиях в черепе нейроны всё равно смещаются на несколько микрометров — этого достаточно, чтобы пипетка промахнулась, соскоблила или проколола клетку. Существующие роботизированные системы либо ориентируются вслепую по грубым электрическим сигналам, либо полагаются на двухфотонную микроскопию, которая дорога, медленна в сканировании и ограничена поверхностными слоями ткани.
Преобразование электрического сопротивления в датчик расстояния
Ли и соавторы решают эту проблему, рассматривая микропипетку не только как регистратор, но и как точный дальномер. Поскольку мозговая жидкость проводит электричество значительно лучше, чем клеточная мембрана, сопротивление на кончике пипетки предсказуемо возрастает по мере приближения к поверхности клетки. Команда создала подробную физическую и компьютерную модель, связывающую это сопротивление с реальным расстоянием между пипеткой и мембраной, учитывая форму пипетки, движение жидкости и то, как мягкая ткань деформируется под давлением. Они откалибровали модель с помощью конечно-элементных симуляций и тщательных измерений геометрии пипетки, а затем подтвердили, что модель даже позволяет оценивать жёсткость разных клеток и поверхностей.
Фильтрация шума и отслеживание движения клеток
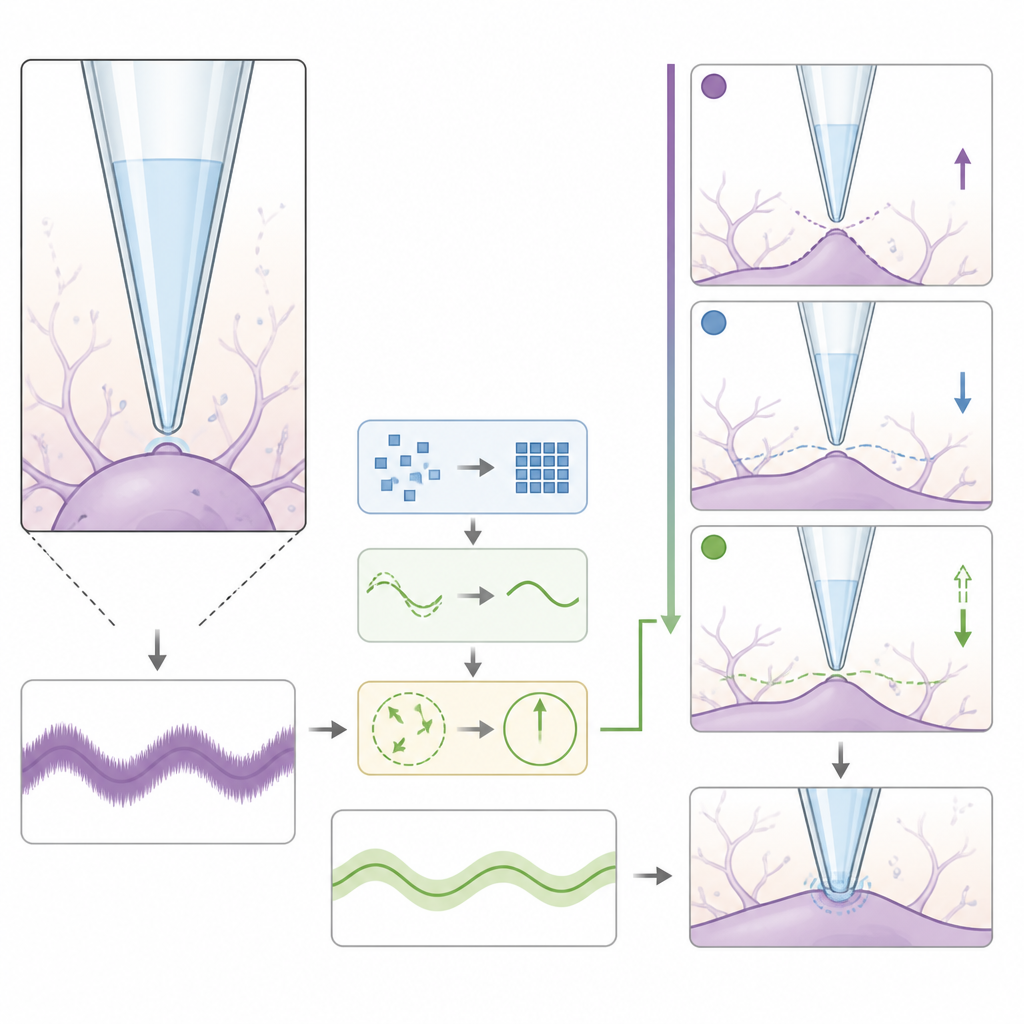
В живом мозге сигнал сопротивления шумный и смешан с ритмическими флуктуациями от сердцебиения и дыхания. Чтобы в реальном времени чисто отслеживать движение клетки, авторы разработали специальный подход к фильтрации, который сочетает адаптивное отслеживание частоты с фильтром Калмана. Этот метод разделяет два основных ритма движения, следит за их меняющимися частотами и восстанавливает сглаженный сигнал без искажения временной структуры. В экспериментах на срезах мозга, где пипетку перемещали в контролируемых шаблонах, имитируя физиологическое движение, система могла оценивать фактическое расстояние пипетка–клетка с ошибкой менее половины микрона. Такая точность достаточна, чтобы безопасно контролировать последние несколько микрометров, от которых зависит образование стабильного уплотнения или разрыв мембраны.
Выбор лучшего момента для запечатывания
Отслеживая движение в реальном времени, команда затем выясняла, в каком моменте каждого циклического движения следует прикасаться пипеткой к клетке. Они сравнили четыре стратегии по времени и обнаружили, что лучше всего целиться в фазу, когда клетка удалена от пипетки максимально. В этой точке разворота клетка кратко останавливается, а затем движется обратно к пипетке, что даёт более длительный период мягкого контакта, благоприятный для образования уплотнения. В анестезированных мышах захваты в этой фазе давали сопротивления уплотнения порядка миллиарда ом — до 55 раз больше, чем при менее удачном времени. Тесты также показали, что умеренное дополнительное вдавливание, вызванное продолжающимся движением после контакта, не повреждает клетки и не препятствует стабильным записям.
Роботы, записывающие разные виды
Все эти элементы были интегрированы в роботизированную платформу патч-клампа, которая управляет движением пипетки, давлением и сбором данных через единый интерфейс. У мышей система обнаруживала близко расположенные клетки в более чем 90% попыток и формировала высококачественные уплотнения примерно в 82% из них, что явно лучше по сравнению с ранними роботизированными методами. Она работала одинаково хорошо на поверхностных и глубоких участках — до примерно одного миллиметра ниже поверхности мозга. Исследователи также показали, что та же схема применима к крысам и мармозеткам, включая бодрствующих животных, считывая их отличительные ритмы сердца и дыхания по изменениям сопротивления и синхронизируя подход соответствующим образом.
Что это означает для исследований мозга
Для неспециалистов основной вывод таков: эта работа превращает деликатное мастерство в более воспроизводимый, автоматизированный процесс. Чувствуя, насколько пипетка удалена от движущегося нейрона, и захватывая в наиболее благоприятную фазу его движения, система облегчает получение стабильных, долговременных записей с отдельных клеток во множестве областей мозга и у разных видов. Это поможет нейроучёным собирать более чистые данные о поведении нейронов при нормальной активности и при заболеваниях и в конечном итоге может поддержать и другие процедуры на уровне отдельных клеток, требующие точного и бережного контакта внутри живого мозга.
Цитирование: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Ключевые слова: патч-кламп, регистрация нейронов, робототехника для мозга, in vivo электрофизиология, отслеживание отдельных клеток