Clear Sky Science · pl
Robotyczny system patch-clamp z lokalizacją w czasie rzeczywistym i fazowo-synchronizowanym uchwytem dynamicznych komórek in vivo z użyciem modelowania oporu mikropipety
Słuchanie pojedynczych komórek mózgu
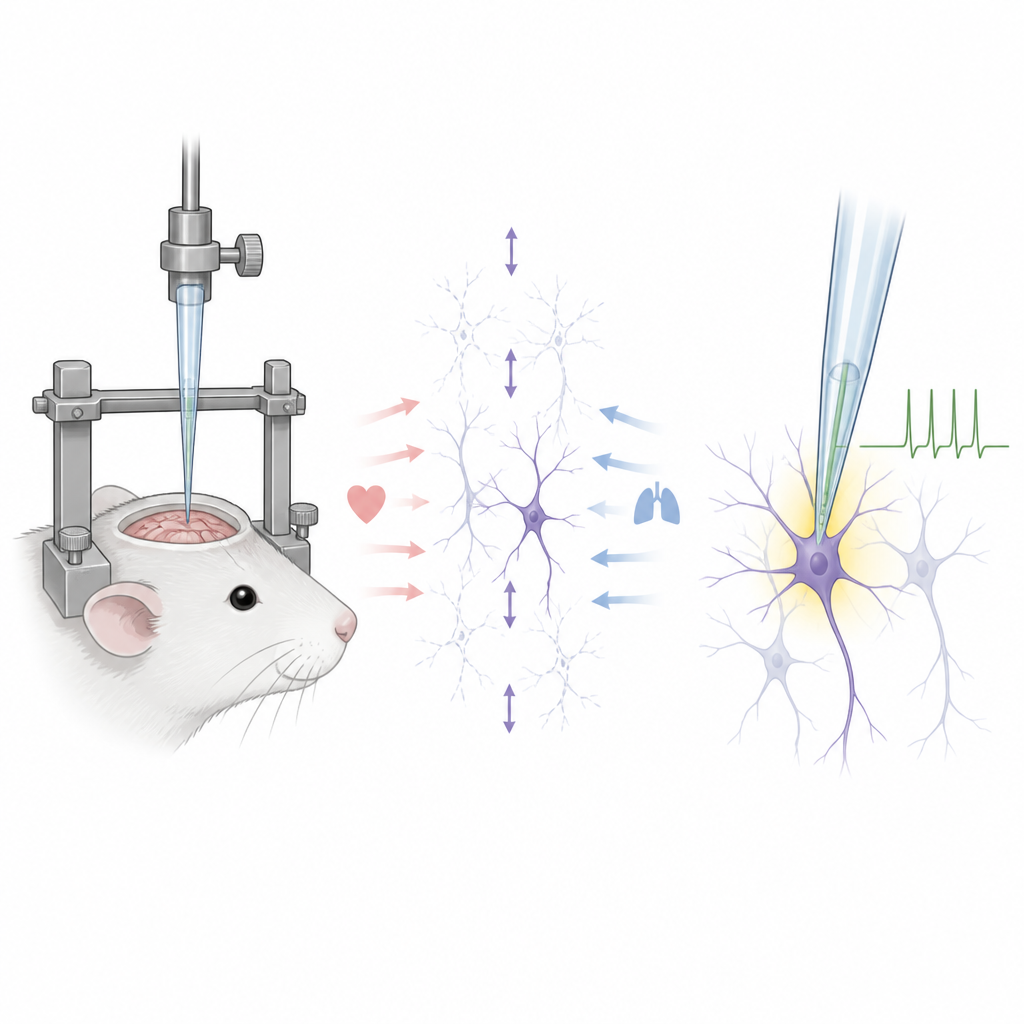
Zrozumienie, jak poszczególne komórki mózgu komunikują się ze sobą, jest kluczowe dla wyjaśnienia myślenia, percepcji i chorób. Jednak rejestrowanie maleńkich sygnałów elektrycznych pojedynczych neuronów w żyjącym, oddychającym zwierzęciu przypomina próbę podłączenia mikrofonu do poruszającego się celu. W tym badaniu przedstawiono system robotyczny, który może śledzić i chwytać te przesuwające się komórki z dużo większą niezawodnością, otwierając drogę do bardziej rutynowych i precyzyjnych pomiarów głęboko w mózgu.
Dlaczego złapanie komórki jest takie trudne
Metoda patch-clamp używa cienkiej szklanej rurki, zwanej mikropipetą, aby delikatnie zeszczelnić się z neuronem i mierzyć prądy o wielkości bilionowej części ampera. Na szalce laboratoryjnej jest to wymagające, ale wykonalne. W żyjącym mózgu komórka jest jednak stale potrząsana przez oddech i pulsujące naczynia krwionośne. Nawet przy sztywnym unieruchomieniu głowy i malutkich otworach w czaszce neurony nadal poruszają się o kilka mikrometrów, co wystarcza, by pipeta chybiła, przejechała bokiem lub przebiła komórkę. Istniejące systemy robotyczne albo poruszają się po omacku na podstawie prymitywnych wskazówek elektrycznych, albo polegają na mikroskopii dwufotonowej, która jest droga, wolna w skanowaniu i ograniczona do płytkich warstw tkanki.
Przekształcanie oporu elektrycznego w czujnik odległości
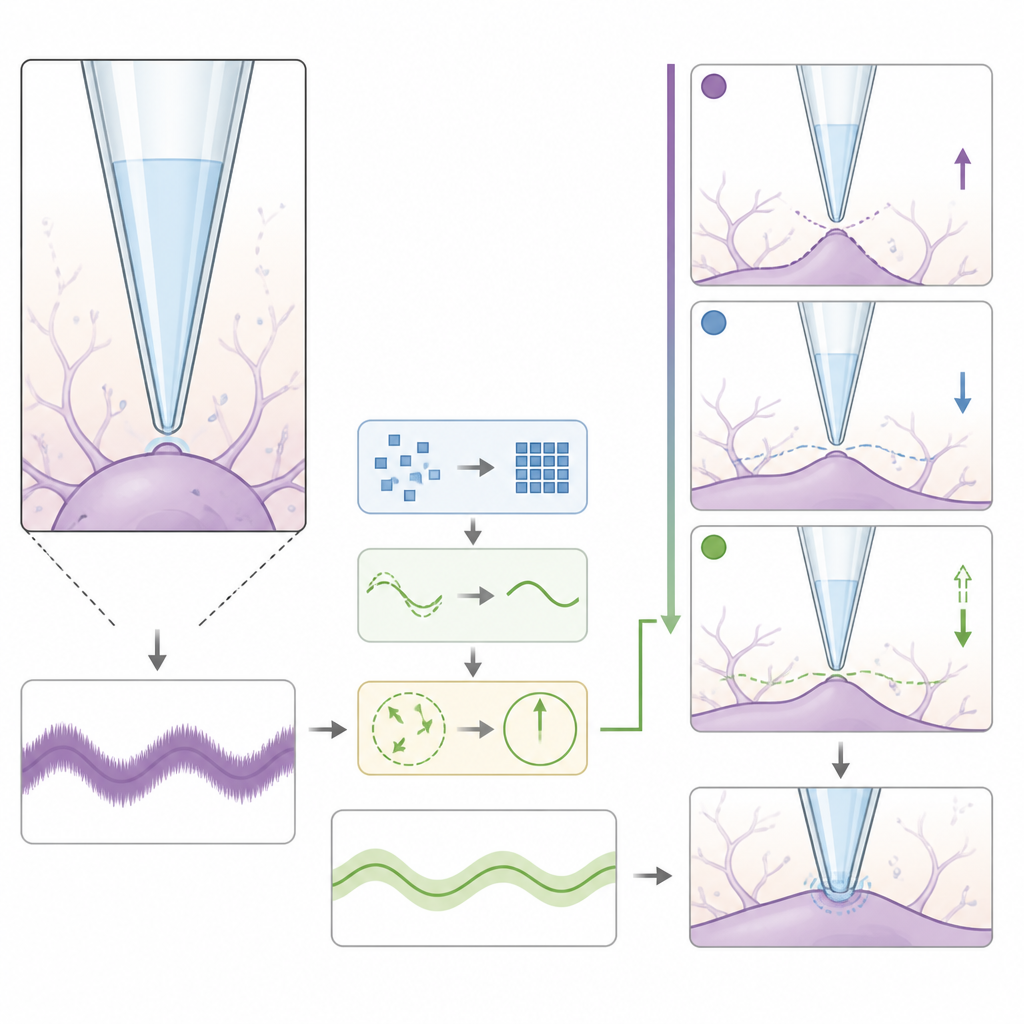
Li i współpracownicy rozwiązują ten problem, traktując mikropipetę nie tylko jako rejestrator, lecz także jako precyzyjny dalmierz. Ponieważ płyn mózgowy przewodzi prąd znacznie lepiej niż błona komórkowa, opór elektryczny na końcu pipety wzrasta w przewidywalny sposób w miarę zbliżania się do powierzchni komórki. Zespół zbudował szczegółowy model fizyczny i komputerowy łączący ten opór z rzeczywistą odległością między pipetą a błoną, uwzględniając kształt pipety, przepływ płynu i sposób, w jaki miękka tkanka odkształca się pod naciskiem. Skalowali ten model za pomocą symulacji elementów skończonych i starannych pomiarów geometrii pipety, a następnie potwierdzili, że potrafi on nawet oszacować sztywność różnych komórek i powierzchni.
Filtrowanie szumu i śledzenie ruchu komórki
W żyjącym mózgu sygnał oporu jest zaszumiony i zmieszany z rytmicznymi fluktuacjami pochodzącymi z bicia serca i oddechu. Aby w czasie rzeczywistym czysto śledzić ruch komórki, autorzy zaprojektowali niestandardowe podejście filtrujące, łączące adaptacyjne śledzenie częstotliwości z filtrem Kalmana. Metoda ta rozdziela dwa główne rytmy ruchu, śledzi ich zmieniające się częstotliwości i rekonstruuje gładki sygnał bez zniekształcania czasowania. W eksperymentach na plastrach mózgu, gdzie pipeta była poruszana w kontrolowanych wzorcach imitujących ruchy fizjologiczne, system potrafił oszacować rzeczywistą odległość pipeta–komórka z błędami poniżej pół mikrometra. Taka dokładność wystarcza, by bezpiecznie kontrolować ostatnie kilka mikrometrów decydujących o tym, czy powstanie trwałe uszczelnienie, czy błona ulegnie rozerwaniu.
Wybieranie najlepszego momentu do uszczelnienia
Z ruchu śledzonego w czasie rzeczywistym zespół zapytał następnie, kiedy w cyklu ruchu pipeta powinna dotknąć komórki. Porównali cztery strategie czasowania i stwierdzili, że najlepsze efekty daje celowanie w punkt, gdy komórka jest najdalej od pipety. W tym punkcie zwrotnym komórka przez chwilę zatrzymuje się, a następnie rusza z powrotem w kierunku pipety, co daje dłuższy okres delikatnego kontaktu sprzyjający tworzeniu uszczelnienia. Uśpione myszy załapanie w tej fazie dawało rezystywności uszczelnienia rzędu miliardów omów, aż do 55 razy wyższe niż przy mniej korzystnych momentach. Testy wykazały również, że umiarkowane dodatkowe wgłębienie spowodowane trwającym ruchem po kontakcie nie uszkadzało komórek ani nie uniemożliwiało stabilnych nagrań.
Roboty rejestrujące w różnych gatunkach
Wszystkie te elementy zintegrowano w platformę robotyczną patch-clamp, która kontroluje ruch pipety, ciśnienie i akwizycję danych przez zunifikowany interfejs. U myszy system wykrywał pobliskie komórki w ponad 90 procentach prób i tworzył uszczelnienia wysokiej jakości w około 82 procentach z tych przypadków, co stanowi wyraźną poprawę w stosunku do wcześniejszych metod robotycznych. Działał równie dobrze w miejscach płytszych i głębszych, sięgając do około jednego milimetra poniżej powierzchni mózgu. Badacze pokazali następnie, że ta sama rama może być zastosowana u szczurów i u małp gibonów (marmosetów), również u zwierząt świadomych, poprzez odczyt ich charakterystycznych wzorców tętna i oddechu z zmian oporu i odpowiednie timingowanie podejścia.
Co to oznacza dla badań mózgu
Dla osób spoza specjalności główny przekaz jest taki, że ta praca zamienia delikatną sztukę w proces bardziej powtarzalny i zautomatyzowany. Dzięki wykrywaniu, jak daleko pipeta znajduje się od poruszającego się neuronu, i uderzaniu w najbardziej wyrozumiałą fazę jego ruchu, system ułatwia uzyskiwanie stabilnych, długotrwałych zapisów z pojedynczych komórek w wielu regionach mózgu i gatunkach. Powinno to pomóc neurobiologom w zbieraniu czystszych danych o zachowaniu neuronów podczas normalnej aktywności i w chorobie, a w końcu może także wspierać inne procedury na pojedynczych komórkach, które wymagają dokładnego, delikatnego kontaktu w żywym mózgu.
Cytowanie: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
Słowa kluczowe: patch clamp, rejestracja neuronów, robotyka mózgowa, elektrofizjologia in vivo, śledzenie pojedynczych komórek