Clear Sky Science · ja
微小ピペット抵抗モデルを用いたリアルタイム局在化と位相同期捕捉を備えたロボット式パッチクランプシステム
単一の脳細胞の内部を聞く
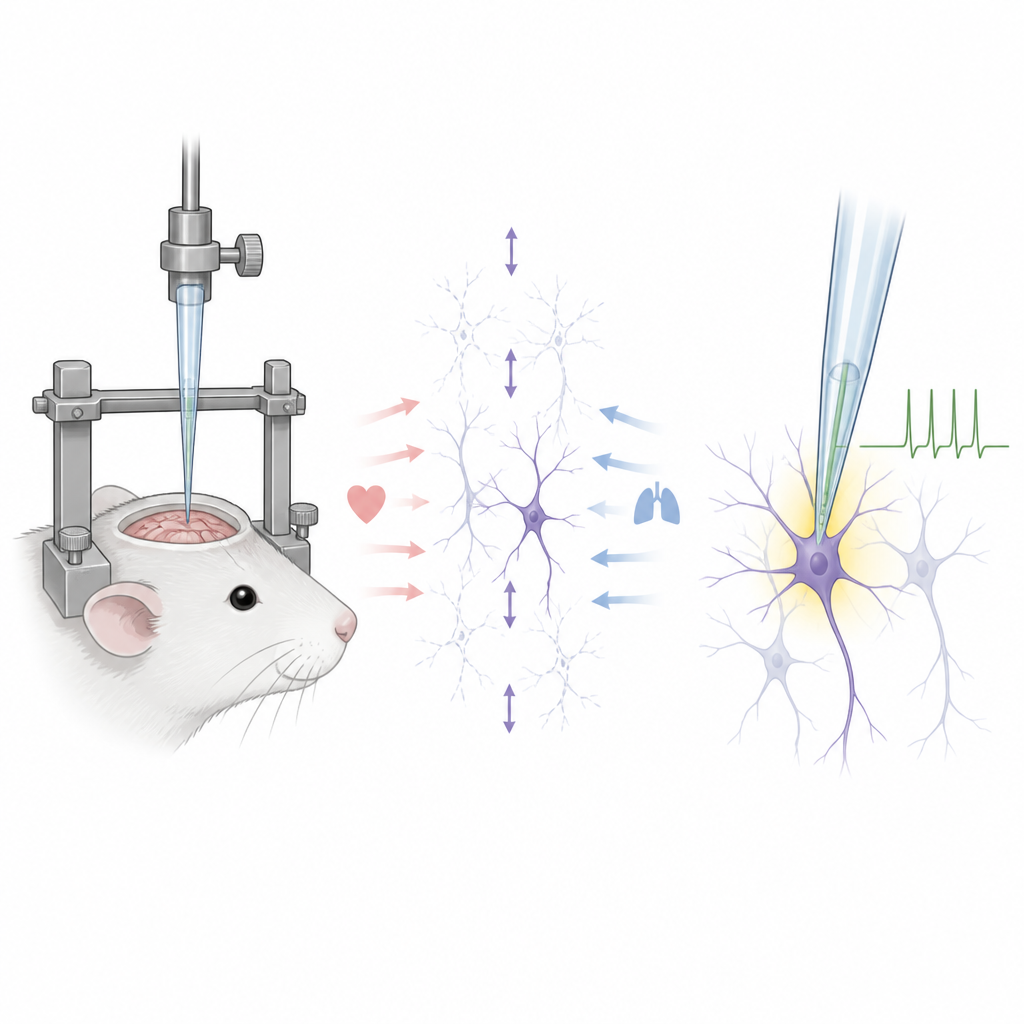
個々の脳細胞が互いにどうやり取りしているかを理解することは、思考や知覚、病気を説明する鍵です。しかし、生きた動物の中で単一ニューロンの微細な電気信号を記録することは、動く標的にマイクを差し込もうとするようなものです。本研究は、こうした位置変動する細胞をより高い信頼性で追跡・捕捉できるロボットシステムを提示し、脳の深部でより日常的かつ精密な計測を可能にします。
なぜ細胞を捕まえるのは難しいのか
パッチクランプ記録では、微細なガラス管(マイクロピペット)を用いてニューロンにやさしくシールし、兆分の一アンペア程度の電流を測定します。シャーレ内では困難ではあるものの管理可能ですが、生体内では呼吸や血管の拍動で細胞が常に揺さぶられます。頭部を固定し小さな開口部を用いても、ニューロンは数マイクロメートル移動し、ピペットが外れてしまったり、擦り過ぎたり、膜を破ってしまったりします。既存のロボット手法は粗い電気的手がかりで盲目的に操作するか、二光子顕微鏡に依存しますが、後者は高価で走査が遅く、浅い組織に限られます。
電気抵抗を距離センサーに変える
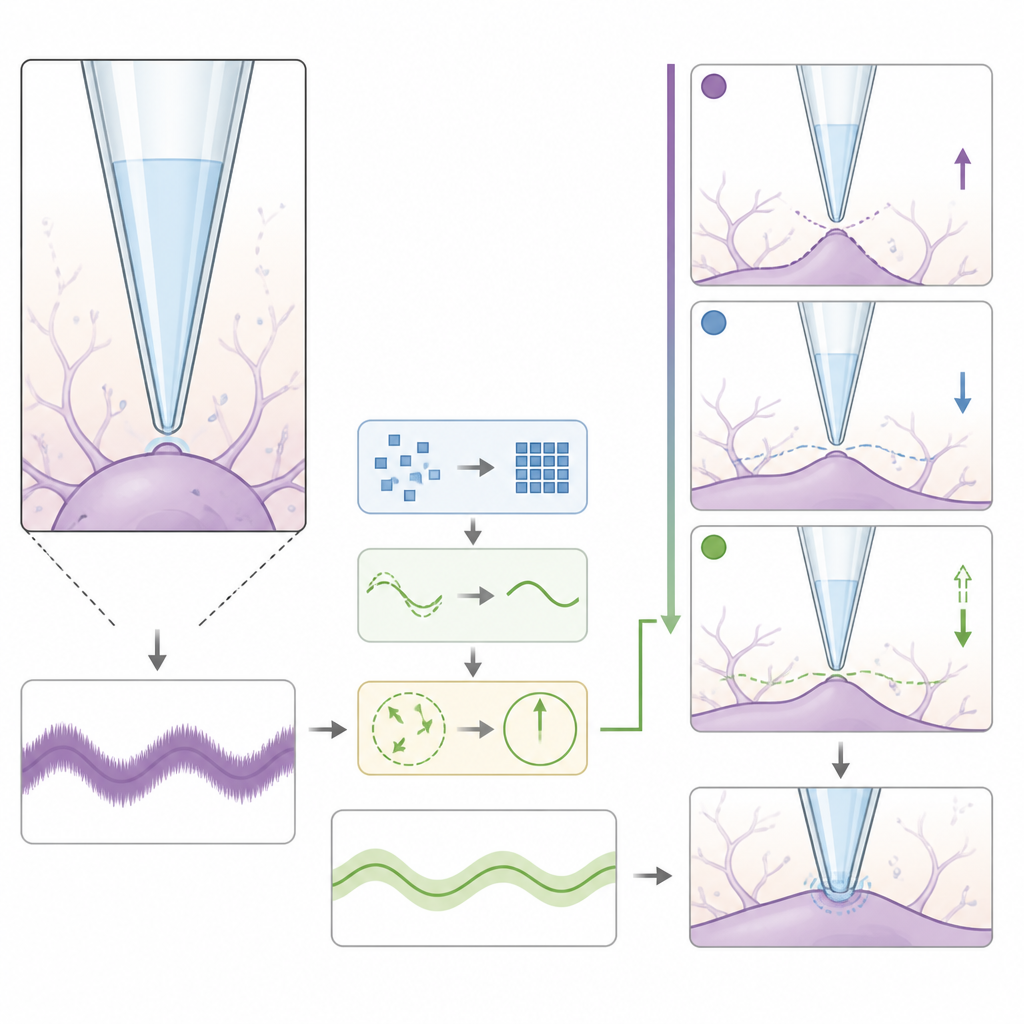
Liらは、マイクロピペットを単なる記録装置としてではなく、精密な距離計として扱うことでこの問題に取り組みました。脳脊髄液や細胞外液は細胞膜より電気伝導性が高いため、ピペット先端の電気抵抗は細胞表面に近づくにつれて予測可能な形で上昇します。研究チームは、ピペット形状、流体の流れ、圧力による軟組織の変形を考慮して、この抵抗をピペットと膜との実際の距離に結びつける詳細な物理・計算モデルを構築しました。有限要素シミュレーションとピペット幾何学の慎重な測定でこのモデルを較正し、さらに細胞や表面の剛性を推定できることを確認しました。
ノイズを取り除き、細胞の動きを追跡する
生体内では、抵抗信号はノイズが多く心拍や呼吸に伴う周期的変動と重なります。リアルタイムで細胞の動きを鮮明に追うために、著者らは適応周波数追跡とカルマンフィルタを組み合わせたカスタムフィルタリング手法を設計しました。この方法は主要な二つの運動リズムを分離し、その変化する周波数を追い、タイミングを歪めずに滑らかな信号を再構築します。ピペットを制御されたパターンで移動させ生理学的な動きを模した脳スライス実験では、ピペットと細胞間の実際の距離を誤差0.5マイクロメートル以下で推定できました。この精度は、安定したシールが得られるか膜が破れるかを左右する最後数マイクロメートルを安全に制御するのに十分です。
シールする最良の瞬間を選ぶ
動きをリアルタイムで追跡できるようになった後、チームは運動周期のどの位相でピペットを細胞に接触させるべきかを検討しました。4つのタイミング戦略を比較したところ、ピペットから最も遠ざかる点(転回点)を狙うのが最も良いことが分かりました。その転回点では細胞が一時的に止まり、再びピペットに向かって動くため、優しく長めに接触する時間が得られシール形成に有利です。麻酔下マウスでの実験では、この位相での捕捉は10億オーム級のシール抵抗を生み、他のタイミングに比べ最大55倍高くなりました。継続する運動によるわずかな追加押し込みは細胞を損傷したり安定記録を妨げたりしないことも示されました。
種を超えたロボット記録
これらの要素は、ピペットの動き、圧力、データ取得を統合インターフェースで制御するロボティック・パッチクランププラットフォームに組み込まれました。マウスでは、システムは試行の90%以上で近傍の細胞を検出し、そのうち約82%で高品質なシールを形成し、従来のロボット手法より明らかな改善を示しました。浅部・深部(脳表面から約1ミリメートル下)いずれでも同様に機能しました。さらに、抵抗の変化からそれぞれの心拍や呼吸パターンを読み取り、それに合わせてアプローチのタイミングを調整することで、ラットやマーモセット(サル)にも応用でき、覚醒動物でも作動することを示しました。
脳研究にとっての意義
専門外の方への核心的なメッセージは、本研究が繊細な技能をより再現可能で自動化されたプロセスに変えたことです。ピペットが動くニューロンからどれだけ離れているかを感知し、その運動の最も取り扱いやすい位相で接触することで、さまざまな脳領域や種から単一細胞の安定で長時間の記録を得やすくします。これにより、ニューロンが正常な活動や病態でどのように振る舞うかについて、より明瞭なデータが収集されるようになり、最終的には生体内での正確で穏やかな接触を必要とする他の単一細胞操作の支援にもつながる可能性があります。
引用: Li, R., Chen, H., Hu, B. et al. A robotic patch-clamp system with real-time localization and phase-synchronized capture of dynamic in vivo cells using micropipette resistance modelling. Microsyst Nanoeng 12, 191 (2026). https://doi.org/10.1038/s41378-026-01325-x
キーワード: パッチクランプ, ニューロン記録, 脳ロボティクス, in vivo 電気生理学, 単一細胞追跡