Clear Sky Science · zh
磁诱导形变驱动的摩擦电传感器,具备磁场与接触压力的双模感知
为机器人提供智能触觉与“第六感”
随着机器人进入电力站、医院、工厂和灾区,它们必须防范两类隐蔽危险:会干扰电子设备的强磁场,以及可能损害机器人和周围环境的碰撞。本文介绍了一种新型软体传感器,为机器人提供一种双重“第六感”——它既能在不接触的情况下感知看不见的磁场,也能在发生碰撞时测量物理压力,并能从运动中自发产生电能。
为何将两种感知合二为一很重要
许多现代机器人已采用独立装置测量磁场和压力,但这些装置往往体积大、需有线供电或在狭小空间中难以使用。现有的双模传感器通常依赖传统电子器件,需要外部电源和封闭电路,使其不太适合紧凑、无线或移动系统。作者认为,一种能够同时检测附近磁性危险与物理接触、柔性且自供电的单一传感器,将提升安全性、减少布线与复杂度,更契合下一代自主机器的需求。
由液体与橡胶构成的软体传感器
研究团队设计了一种双模摩擦电传感器(DM-TS),其原理类似摩擦起电现象——比如吹起气球摩擦头发后会粘在头发上。该器件在可拉伸的硅胶框架内夹持两种特殊液体。下腔填充一种称为磁流体的磁性液体,上腔则装有作为电极的液态金属合金。两者之间是一层带有微小尖刺结构的硅胶橡皮。当尖刺状橡胶与磁流体反复接触分离时,会产生电荷并被液态金属拾取。由于材料柔软,传感器可弯曲、伸展并贴合曲面机器人结构,且具有良好的生物相容性。 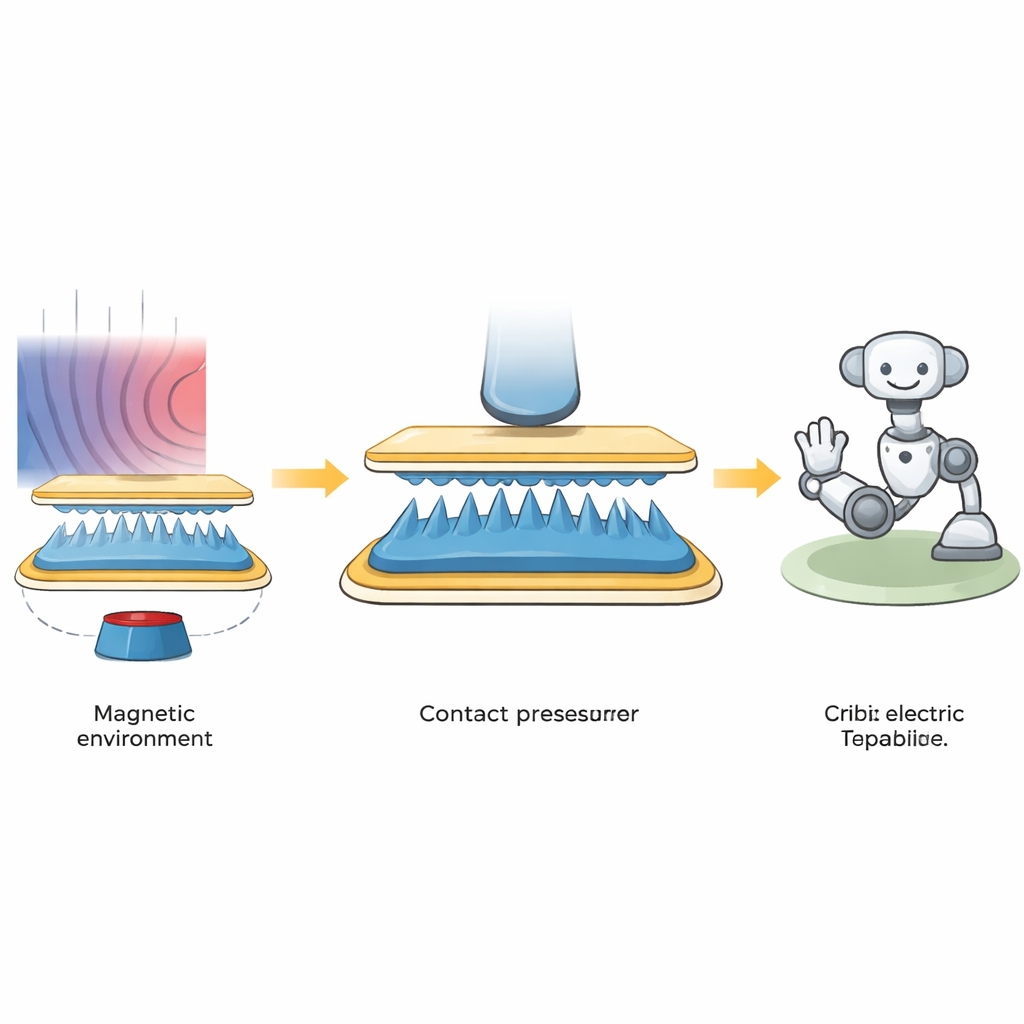
在不接触的情况下感知看不见的磁场
为了感知磁场,该传感器无需接触任何物体。当磁铁从下方靠近时,磁流体沿磁力线重组,从平坦液面上升成一排排锋利的尖峰,与上方的硅胶尖刺相互啮合。这显著增大了两表面的接触面积,从而增强了产生的电信号。通过将永久磁体前后移动,研究者表明输出电压随磁场强度上升且在有用范围内保持良好线性,灵敏度接近商用霍尔元件——但无需偏置电流或外部电源。该器件还能捕捉磁铁的侧向运动,产生更复杂的信号,编码速度与距离信息,有助于机器人绘制其进入或离开危险区域的速度信息。
检测轻触与较强的按压
作为压力传感器时,DM-TS对自上而下施加的力有响应。随着载荷压在顶面,柔性的硅胶尖刺被推动进入磁流体,改变接触面积。这种由压力驱动的形变会产生幅度随力增大的电压脉冲。有趣的是,该传感器在较高压力下灵敏度反而提高,这与许多标准压力传感器不同。作者将这种行为归因于两种不同的形变模式以及磁流体在压力下黏度增加的特性:在低负载下,变化主要来源于液态金属电极的重塑;而在较高负载下,尖刺完全与磁流体接合,磁流体颗粒更紧密堆积,形成更类固体的网络,增强电荷传递。在测试的最高压力范围内,传感器达到极高的压力灵敏度,其主要限制是需避免将液体从密封腔体中挤出。 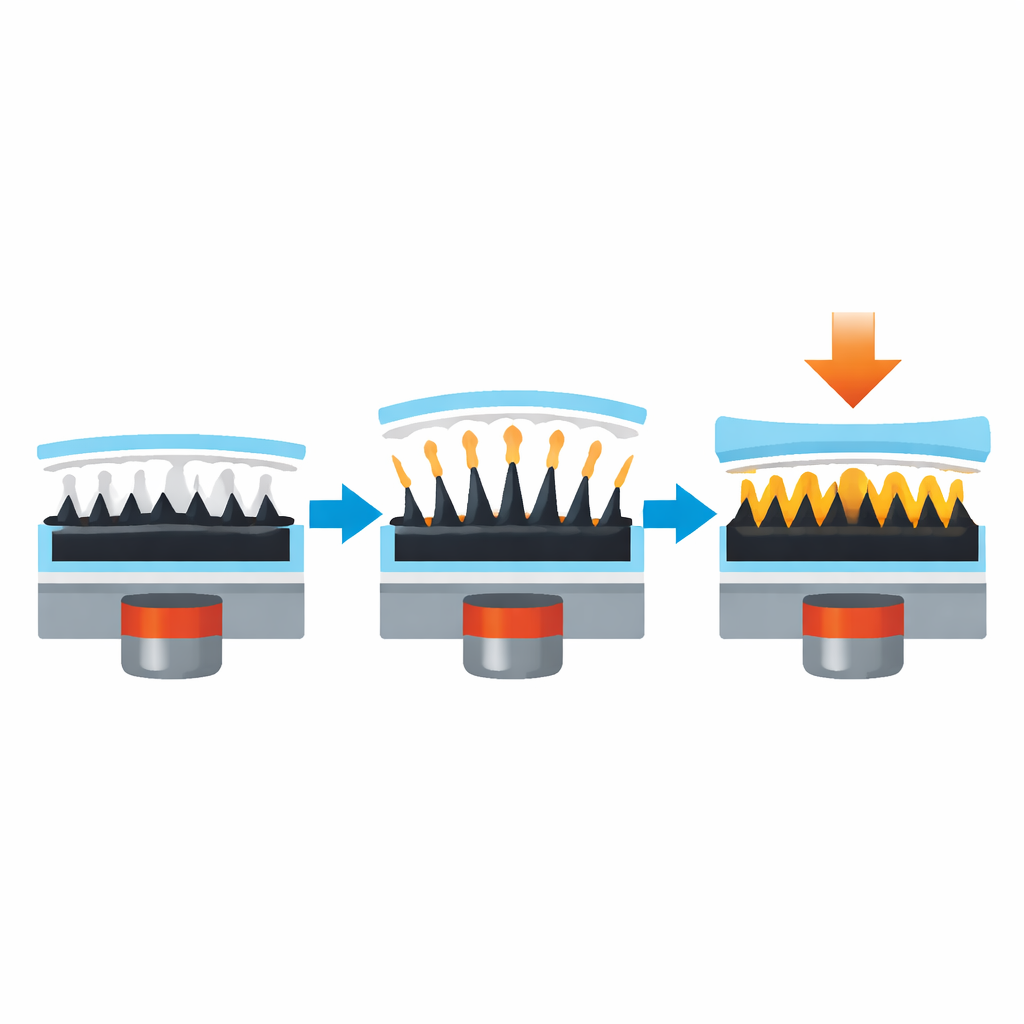
帮助机器人避开危险
为了展示这种双模感知在现实中的应用,研究者将DM-TS安装在一台无人地面车上,并将其连接到简单的阈值检测电路与电机控制器。当车辆经过强磁体附近时,传感器输出增大直至超过预设阈值,触发控制器反转电机以引导机器人远离磁性“热点”。当机器人撞到障碍物时,幅值更大且更尖锐的压力信号激活另一个阈值,使车辆后退以避免进一步碰撞。即便磁场与碰撞信号重叠,其叠加强度仍能触发保护性响应,表明两者精确分离并非关键,可靠触发规避行为更为重要。
对未来机器的意义
简言之,作者构建了一种柔软、自供电的贴片,使机器人能用同一微小器件同时感知自身接触到物体的压力和附近不可见的磁性危险。通过精心选择对磁场与压力有响应的液体,并配以花纹化的橡胶表面,他们在保持薄型、柔性与易于集成的同时,达到了甚至超越许多需外供电传感器的性能。随着这些设计在更恶劣环境和更长寿命方向上的改进,类似的双模摩擦电传感器有望成为机器人与可穿戴系统的标准“皮肤”,帮助它们在复杂且不可见的危险中更安全、更智能地移动。
引用: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
关键词: 摩擦电传感器, 磁流体, 磁场感测, 压力感测, 智能机器人