Clear Sky Science · ru
Деформация, вызванная магнитом, приводящая в действие трибоэлектрический датчик с двухрежимным восприятием магнитного поля и контактного давления
Умный такт и «шестое чувство» для роботов
По мере того как роботы входят на электростанции, в больницы, на заводы и в зоны бедствий, им нужно избегать двух скрытых угроз: сильных магнитных полей, которые могут нарушить их электронику, и столкновений, которые могут повредить как робота, так и окружение. В этой работе представлен новый мягкий датчик, обеспечивающий роботам своего рода двойное «шестое чувство» — он может ощущать как невидимые магнитные поля без контакта, так и физическое давление при столкновении, при этом генерируя собственную электроэнергию от движения.
Почему важно сочетать два чувства
Многие современные роботы уже используют разные устройства для измерения магнитных полей и давления, но они часто громоздки, требуют проводного питания или плохо работают в стеснённых условиях. Существующие датчики с двумя режимами обычно опираются на традиционную электронику, нуждающуюся во внешнем питании и замкнутых цепях, что делает их менее подходящими для компактных, беспроводных или мобильных систем. Авторы утверждают, что единый гибкий самопитающийся датчик, способный обнаруживать и близкие магнитные угрозы, и физический контакт, повысит безопасность, сократит количество проводки и сложность, а также лучше удовлетворит потребности следующего поколения автономных машин.
Мягкий датчик из жидкостей и резины
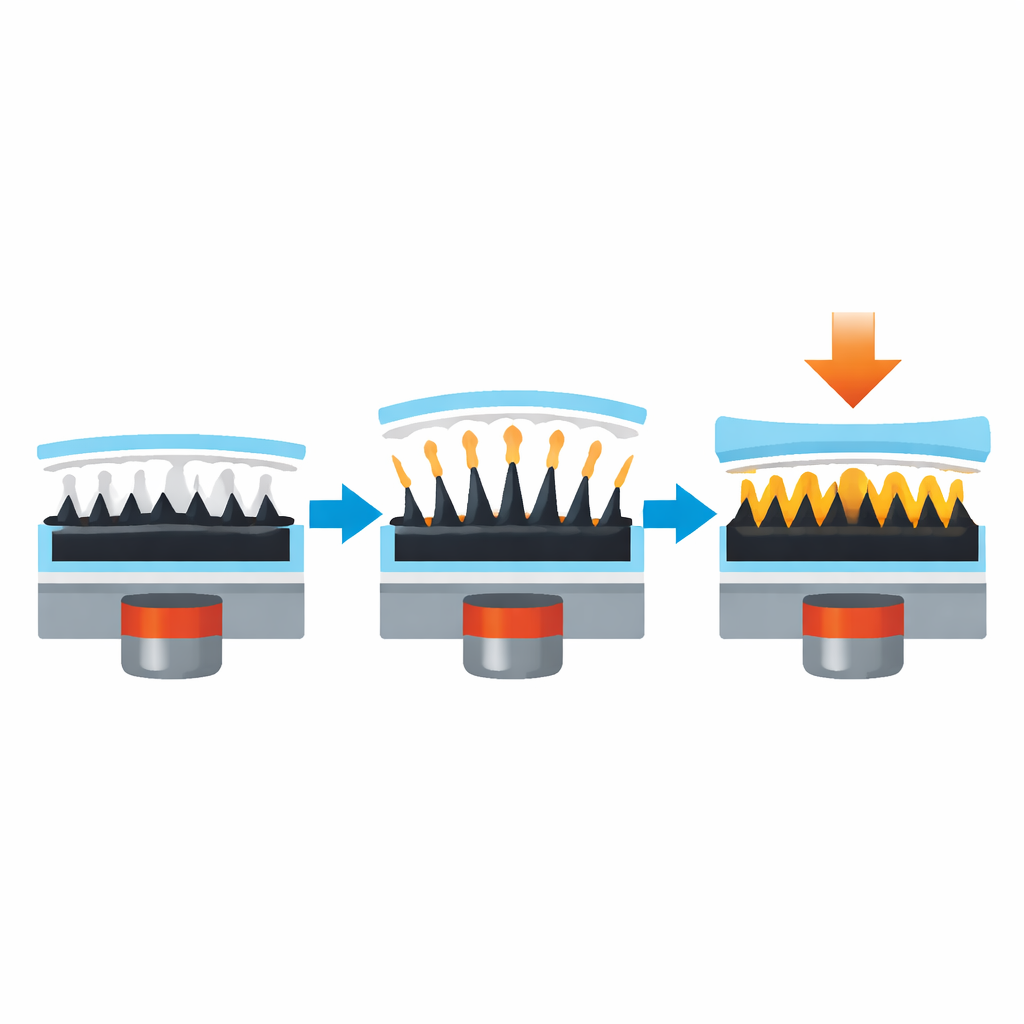
Команда разработала двухрежимный трибоэлектрический датчик (DM-TS), основанный на том же эффекте контактной электризации, который заставляет шарик прилипать к волосам после трения. Устройство помещает две специальные жидкости внутрь растягивающейся силиконовой рамки. Нижняя полость содержит магнитную жидкость — феррораствор, а верхняя полость заполнена жидкометаллическим сплавом, служащим электродом. Между ними расположен слой силиконовой резины с микрошипами. Когда шипованный резиновый слой и феррораствор входят в контакт и выходят из него, накапливаются электрические заряды, которые считываются жидким металлом. Благодаря мягким материалам датчик может гнуться, растягиваться и подстраиваться под изогнутые поверхности робота, обладая хорошей биосовместимостью. 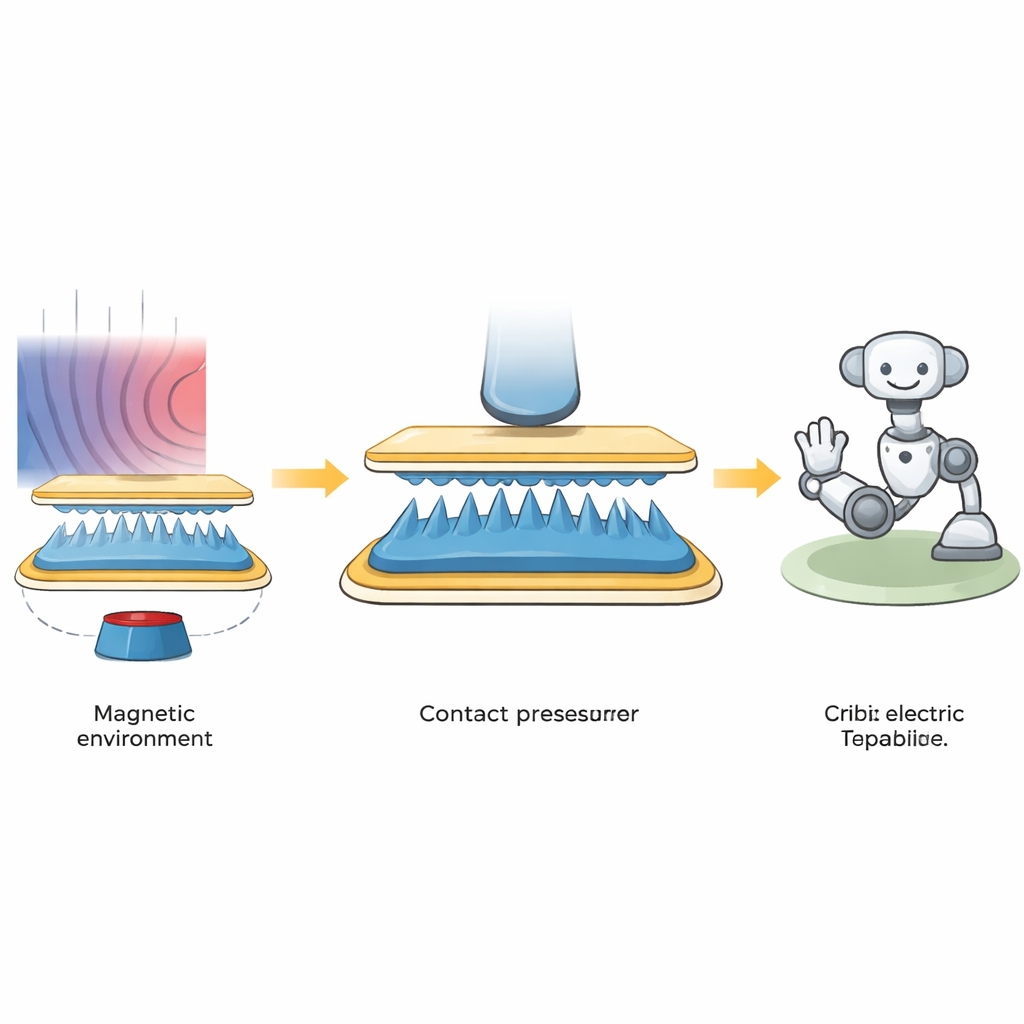
Ощущение невидимых магнитных полей без прикосновения
Для обнаружения магнитных полей датчику не требуется соприкасаться с объектом. Когда магнит приближается снизу, феррораствор перестраивается вдоль магнитных линий, поднимаясь из плоской лужицы в массив острых шпилей, которые «срастаются» с силиконовыми шипами сверху. Это значительно увеличивает площадь контакта между поверхностями и усиливает генерируемый электрический сигнал. Перемещая постоянный магнит ближе и дальше, исследователи показали, что выходное напряжение повышается с ростом магнитного поля и остаётся достаточно линейным в полезном диапазоне, достигая чувствительности, сопоставимой с коммерческими чипами эффекта Холла — но без необходимости в токе смещения или внешнем питании. Устройство также улавливает боковые перемещения магнита, давая более сложные сигналы, кодирующие и скорость, и расстояние, что может помочь роботам оценивать, с какой скоростью они входят в опасную зону или покидают её.
Обнаружение нежных прикосновений и более сильных толчков
В роли датчика давления DM-TS реагирует на силы, приложенные сверху. При нажатии на верхнюю поверхность гибкие силиконовые шипы вдавливаются в феррораствор, меняя площадь контакта. Эта деформация под давлением вызывает электрические импульсы, амплитуда которых растёт с увеличением силы. Примечательно, что датчик становится более чувствительным при больших давлениях, в отличие от многих стандартных датчиков давления. Авторы объясняют это двумя режимами деформации и тем, как феррораствор упрочняется под давлением: при малых нагрузках основное изменение связано с перераспределением жидкометаллического электрода, а при больших нагрузках шипы полностью контактируют с феррораствором, частицы которого уплотняются и образуют более твердую сеть, усиливающую перенос заряда. В наивысшем протестированном диапазоне чувствительность к давлению оказывается очень высокой, ограниченной в основном необходимостью не выдавливать жидкость из герметичных полостей.
Помощь роботам в обходе опасностей
Чтобы продемонстрировать практическую полезность двойного датчика, исследователи смонтировали DM-TS на беспилотном наземном транспорте и подключили его к простой схеме детектирования порога и контроллеру моторов. Когда машина проезжала вблизи сильного магнита, выход датчика рос до пересечения заданного предела, что вызывало срабатывание контроллера — реверс моторов и отведение робота от магнитного «очага». При столкновении с препятствием гораздо более крупный и резкий сигнал давления активировал отдельный порог, заставляя транспорт отступить и избежать дальнейшего удара. Даже когда магнитные и ударные сигналы накладывались, их суммарная сила всё равно запускала защитную реакцию, показывая, что точное разделение двух типов сигналов менее важно, чем надёжное срабатывание избегания опасности.
Что это означает для будущих машин
Проще говоря, авторы создали мягкий самопитающийся патч, который позволяет роботу одновременно ощущать прикосновение к чему-то и обнаруживать невидимую магнитную угрозу поблизости, используя одно компактное устройство. Подбором жидкостей, реагирующих на магнит и давление, и сочетанием их с рельефной резиновой поверхностью им удалось достичь показателей, сравнимых или превосходящих многие питавшиеся датчики, при этом сохранив тонкость, гибкость и простоту интеграции. По мере улучшения подобных конструкций для более суровых условий и длительного срока службы аналогичные двухрежимные трибоэлектрические датчики могут стать стандартной «кожей» для роботов и носимых систем, помогая им безопаснее и разумнее передвигаться в сложной среде с невидимыми опасностями.
Цитирование: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Ключевые слова: трибоэлектрический датчик, феррораствор, сенсор магнитного поля, сенсор давления, интеллектуальные роботы