Clear Sky Science · fr
Déformation induite par un aimant entraînant un capteur triboélectrique à perception double mode pour champ magnétique et pression de contact
Toucher intelligent et « sixième sens » pour les robots
Alors que les robots pénètrent dans les centrales électriques, les hôpitaux, les usines et les zones sinistrées, ils doivent éviter deux dangers cachés : des champs magnétiques forts qui peuvent brouiller leur électronique, et des collisions qui peuvent endommager à la fois le robot et son environnement. Cet article présente un nouveau capteur souple qui confère aux robots une sorte de « sixième sens » double — il peut détecter à la fois des champs magnétiques invisibles sans contact et la pression physique lorsqu’il heurte quelque chose, tout en générant sa propre électricité à partir du mouvement.
Pourquoi combiner deux perceptions importe
Beaucoup de robots modernes utilisent déjà des dispositifs séparés pour mesurer les champs magnétiques et la pression, mais ceux-ci sont souvent encombrants, requièrent une alimentation filaire, ou peinent dans les espaces confinés. Les capteurs bimodes existants reposent généralement sur l’électronique traditionnelle qui a besoin d’une alimentation externe et de circuits fermés, ce qui les rend moins adaptés aux systèmes compacts, sans fil ou mobiles. Les auteurs soutiennent qu’un capteur unique, flexible et auto-alimenté, capable de détecter à la fois les dangers magnétiques à proximité et le contact physique, améliorerait la sécurité, réduirait le câblage et la complexité, et correspondrait mieux aux besoins des machines autonomes de nouvelle génération.
Un capteur souple fabriqué à partir de liquides et de caoutchouc
L’équipe a conçu un capteur triboélectrique bimode, ou DM-TS, qui s’appuie sur le même effet fondamental qui fait qu’un ballon colle à vos cheveux après frottement — l’électrification par contact. Leur dispositif enferme deux liquides spéciaux dans un cadre en caoutchouc silicone extensible. La cavité inférieure contient un liquide magnétique appelé ferrofluide, tandis que la cavité supérieure abrite un alliage métallique liquide qui sert d’électrode. Entre les deux se trouve une couche de silicone à surface structurée en petites pointes. Lorsque le caoutchouc en pointe et le ferrofluide se mettent en contact puis se séparent, des charges électriques se forment et sont collectées par le métal liquide. Parce que les matériaux sont souples, le capteur peut se plier, s’étirer et s’adapter aux surfaces courbées des robots avec une bonne compatibilité biologique. 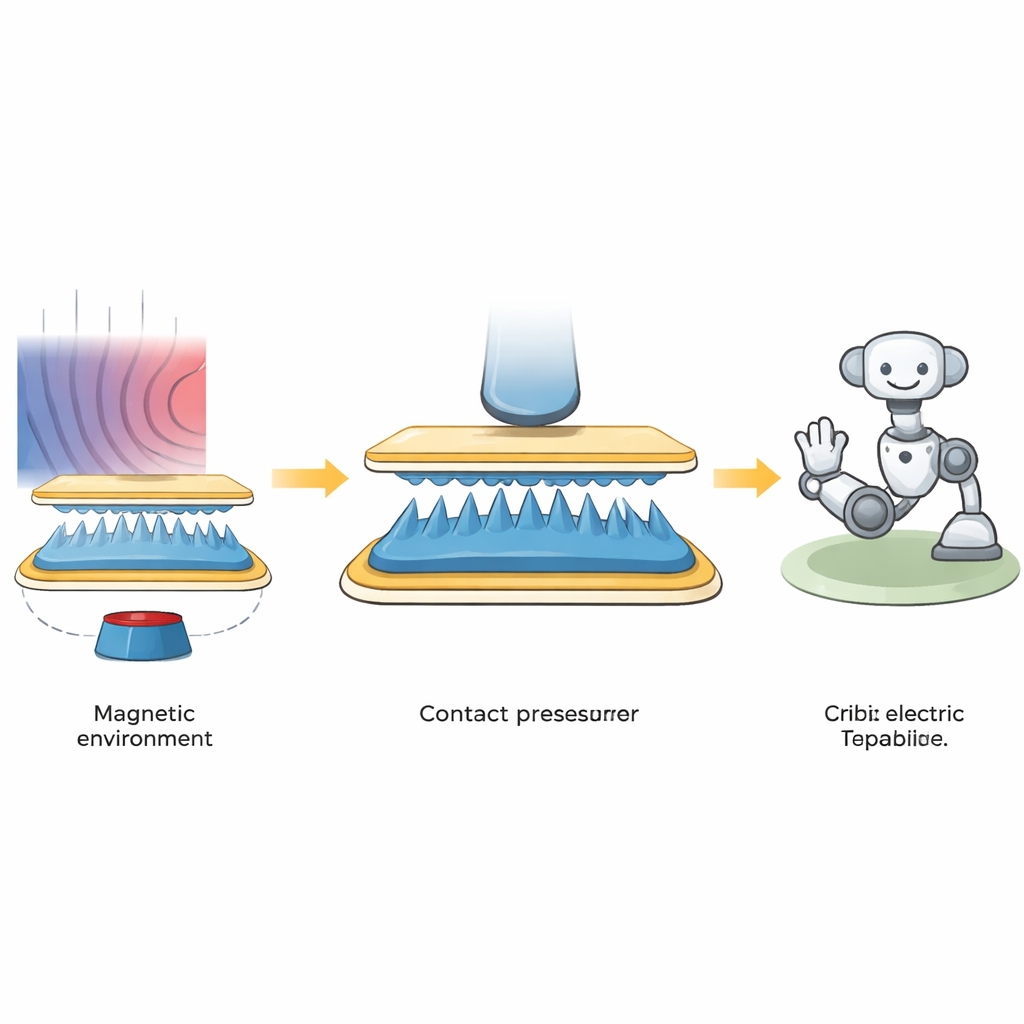
Percevoir des champs magnétiques invisibles sans contact
Pour détecter les champs magnétiques, le capteur n’a pas besoin de toucher quoi que ce soit. Lorsqu’un aimant approche par en dessous, le ferrofluide se réorganise selon les lignes du champ magnétique, passant d’une nappe plate à un réseau d’épis pointus qui s’emboîtent avec les pointes en silicone ci‑dessus. Cela augmente fortement la surface de contact entre les deux surfaces et amplifie le signal électrique qu’elles génèrent. En rapprochant et en éloignant un aimant permanent, les chercheurs ont montré que la tension de sortie augmente avec l’intensité du champ magnétique et reste suffisamment linéaire sur une plage utile, atteignant une sensibilité comparable à celle de puces à effet Hall commerciales — mais sans nécessiter de courant d’alimentation ou d’énergie externe. Le dispositif peut également détecter le mouvement latéral d’un aimant, avec des signaux plus complexes codant à la fois la vitesse et la distance, ce qui pourrait aider les robots à cartographier la vitesse à laquelle ils entrent ou sortent de zones dangereuses.
Détecter de légères touches et des poussées plus fortes
Lorsque le DM-TS est utilisé comme capteur de pression, il répond aux forces appliquées depuis le dessus. Quand une charge appuie sur la surface supérieure, les pointes de silicone flexibles sont enfoncées dans le ferrofluide, modifiant la zone de contact. Cette déformation induite par la pression produit des impulsions de tension dont l’amplitude augmente avec la force. Fait intéressant, le capteur devient plus sensible à des pressions plus élevées, contrairement à de nombreux capteurs de pression standards. Les auteurs attribuent ce comportement à deux modes de déformation différents et à la façon dont le ferrofluide s’épaissit sous pression : sous faibles charges, la majorité du changement provient de la reconfiguration de l’électrode en métal liquide, tandis qu’à charges plus élevées, les pointes s’engagent complètement avec le ferrofluide et ses particules se rapprochent, formant un réseau plus solide qui améliore le transfert de charge. Dans la plage la plus élevée testée, le capteur atteint une sensibilité à la pression très élevée, limitée principalement par la nécessité d’éviter d’extraire du liquide des cavités scellées. 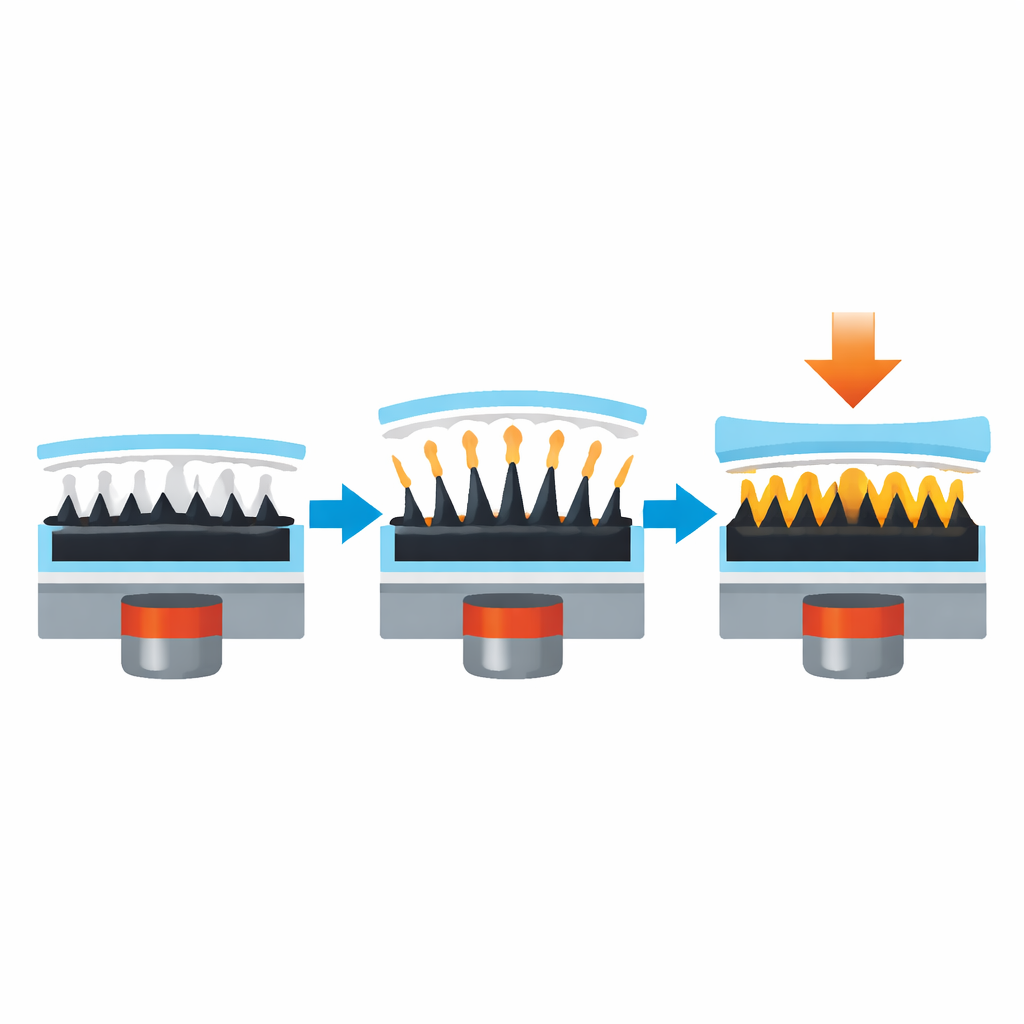
Aider les robots à éviter le danger
Pour montrer comment cette double détection pourrait fonctionner dans le monde réel, les chercheurs ont monté le DM-TS sur un véhicule terrestre sans pilote et l’ont connecté à un circuit simple de détection par seuil et à un contrôleur moteur. Lorsque le véhicule passait près d’un aimant puissant, la sortie du capteur augmentait jusqu’à franchir une limite prédéfinie, déclenchant le contrôleur qui inversait les moteurs et éloignait le robot du « point chaud » magnétique. Quand le robot heurtait un obstacle, le signal de pression, bien plus grand et plus net, activait un autre seuil distinct, provoquant la retraite du véhicule pour éviter d’autres impacts. Même lorsque les signaux magnétiques et de collision se chevauchaient, leur intensité combinée déclenchait toujours une réponse protectrice, démontrant que la séparation précise des deux n’était pas aussi importante que la capacité fiable à provoquer un comportement d’évitement.
Ce que cela implique pour les machines du futur
En termes simples, les auteurs ont construit une pastille souple et auto‑alimentée qui permet à un robot de sentir à la fois quand il appuie sur quelque chose et quand un danger magnétique invisible se trouve à proximité, en utilisant un même petit dispositif. En choisissant soigneusement des liquides répondant au magnétisme et à la pression et en les associant à une surface en caoutchouc structurée, ils égalent ou dépassent les performances de nombreux capteurs alimentés tout en restant minces, flexibles et faciles à intégrer. À mesure que ces conceptions seront améliorées pour résister à des environnements plus rudes et durer plus longtemps, des capteurs triboélectriques bimodes similaires pourraient devenir la « peau » standard des robots et des systèmes portables, les aidant à se déplacer de façon plus sûre et plus intelligente à travers des dangers complexes et invisibles.
Citation: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Mots-clés: capteur triboélectrique, ferrofluide, détection de champ magnétique, détection de pression, robots intelligents