Clear Sky Science · de
Magnetisch induzierte Deformation treibender triboelektrischer Sensor mit Dualmodus-Wahrnehmung für Magnetfeld und Kontaktdruck
Intelligente Berührung und „sechster Sinn“ für Roboter
Wenn Roboter in Kraftwerke, Krankenhäuser, Fabriken und Katastrophengebiete vordringen, müssen sie zwei verborgene Gefahren meiden: starke Magnetfelder, die ihre Elektronik stören können, und Kollisionen, die sowohl den Roboter als auch seine Umgebung beschädigen können. Diese Arbeit stellt einen neuen weichen Sensor vor, der Robotern eine Art doppelten „sechsten Sinn“ verleiht — er kann sowohl unsichtbare Magnetfelder aus der Ferne wahrnehmen als auch physischen Druck bei Kontakt spüren, und das alles, während er seine eigene Energie aus Bewegung erzeugt.
Warum die Kombination zweier Sinne wichtig ist
Viele moderne Roboter verwenden bereits separate Geräte zur Messung von Magnetfeldern und Druck, doch diese sind oft sperrig, benötigen verkabelte Energie oder funktionieren schlecht in engen Räumen. Bestehende Dualmodus-Sensoren basieren häufig auf herkömmlicher Elektronik, die externe Stromversorgung und geschlossene Schaltkreise verlangt, was sie weniger geeignet für kompakte, kabellose oder mobile Systeme macht. Die Autoren argumentieren, dass ein einzelner, flexibler, selbstversorgender Sensor, der sowohl nahe Magnetgefahren als auch physischen Kontakt erkennen kann, die Sicherheit verbessern, Verkabelung und Komplexität reduzieren und besser zu den Anforderungen autonomer Maschinen der nächsten Generation passen würde.
Ein weicher Sensor aus Flüssigkeiten und Gummi
Das Team entwickelte einen Dualmodus-triboelektrischen Sensor, kurz DM-TS, der auf dem gleichen grundlegenden Effekt beruht, der einen Ballon nach dem Reiben am Haar haften lässt — Kontakt-Elektrifizierung. Ihr Gerät legt zwei spezielle Flüssigkeiten in einem dehnbaren Silikongummi-Rahmen übereinander. Die untere Kammer enthält eine magnetische Flüssigkeit, ein Ferrofluid, während die obere Kammer eine flüssige Metalllegierung als Elektrode beherbergt. Dazwischen liegt eine Silikonschicht mit feinen, stachelartigen Strukturen. Wenn das gestachelte Gummi und das Ferrofluid in und aus Kontakt kommen, baut sich elektrische Ladung auf, die von der flüssigen Elektrode aufgenommen wird. Da die Materialien weich sind, kann der Sensor biegen, dehnen und sich an gewölbte Robotoberflächen anpassen und bietet dabei gute Biokompatibilität. 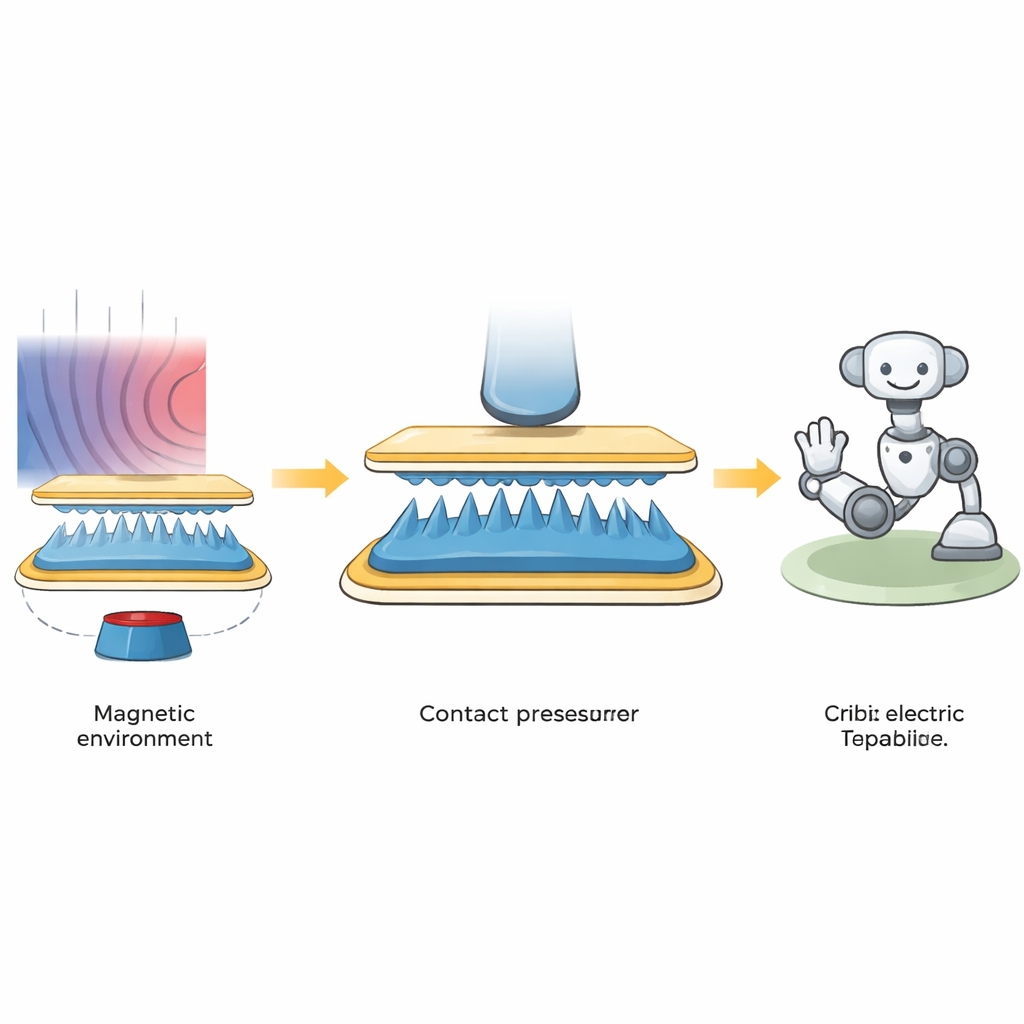
Unsichtbare Magnetfelder fühlen, ohne zu berühren
Um Magnetfelder zu erfassen, muss der Sensor nichts berühren. Wenn sich ein Magnet von unten nähert, ordnet sich das Ferrofluid entlang der Feldlinien neu und steigt von einer flachen Fläche zu einer Anordnung scharfer Spitzen auf, die mit den Silikonstacheln darüber verzahnen. Das vergrößert die Kontaktfläche zwischen den beiden Oberflächen deutlich und verstärkt das erzeugte elektrische Signal. Durch das Nähern und Entfernen eines Permanentmagneten zeigten die Forschenden, dass die Ausgangsspannung mit der Magnetfeldstärke ansteigt und über einen nützlichen Bereich linear bleibt, wobei eine Empfindlichkeit erreicht wird, die mit kommerziellen Halleffektchips vergleichbar ist — jedoch ohne Biasstrom oder externe Energiequelle. Das Gerät erkennt auch seitliche Magnetbewegungen und liefert komplexere Signale, die sowohl Geschwindigkeit als auch Abstand kodieren können, was Robotern helfen könnte, abzuschätzen, wie schnell sie in oder aus Gefahrenzonen hinein- bzw. herausfahren.
Sanfte Berührungen und stärkere Stöße erkennen
Als Drucksensor reagiert der DM-TS auf von oben aufgebrachte Kräfte. Wenn eine Last auf die obere Fläche drückt, werden die flexiblen Silikonstacheln in das Ferrofluid hineingedrückt, wodurch sich die Kontaktfläche verändert. Diese druckgetriebene Deformation erzeugt Spannungspulse, deren Amplitude mit der Kraft zunimmt. Interessanterweise wird der Sensor bei höheren Drücken empfindlicher, anders als viele Standarddrucksensoren. Die Autoren führten dieses Verhalten auf zwei unterschiedliche Deformationsmodi und auf die Verdickung des Ferrofluids unter Druck zurück: Bei geringen Lasten resultiert der Großteil der Veränderung aus der Umformung der flüssigen Metallelektrode, während bei höheren Lasten die Stacheln vollständig in das Ferrofluid eingreifen und dessen Partikel dichter gepackt werden, sodass ein eher festigkeitsähnliches Netzwerk entsteht, das den Ladungstransfer verstärkt. Im höchsten getesteten Bereich erreicht der Sensor sehr hohe Druckempfindlichkeit, begrenzt vor allem durch die Notwendigkeit, ein Herausdrücken der Flüssigkeiten aus den versiegelten Kammern zu vermeiden. 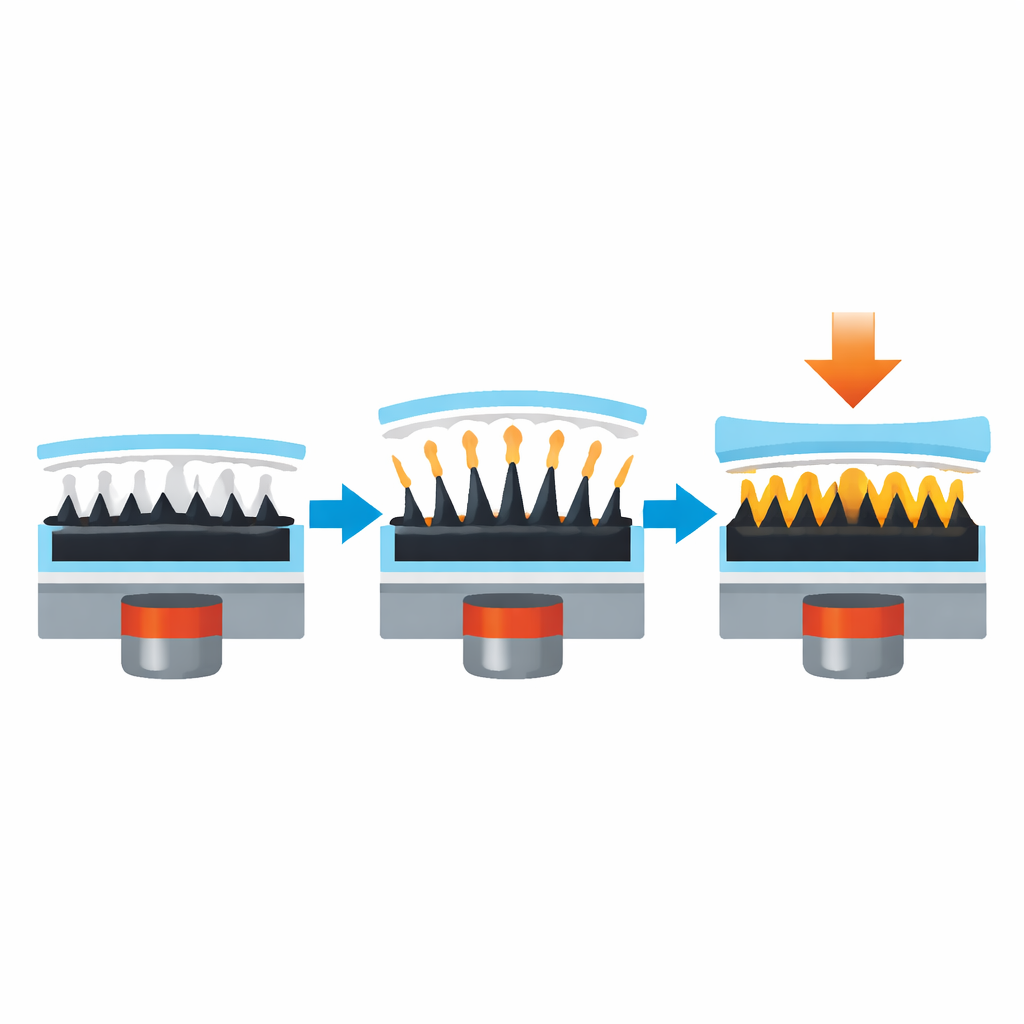
Roboter vor Gefahren meiden helfen
Um zu demonstrieren, wie diese Dualwahrnehmung in der Praxis funktionieren kann, montierten die Forschenden den DM-TS an einem unbemannten Bodenfahrzeug und schlossen ihn an eine einfache Schwellenwert-Erkennungsschaltung und einen Motorcontroller an. Wenn das Fahrzeug an einem starken Magneten vorbeifuhr, wuchs das Sensorsignal, bis es einen voreingestellten Grenzwert überschritt, was den Controller veranlasste, die Motoren umzudrehen und das Fahrzeug vom magnetischen „Hot-Spot“ wegzulenken. Stieß der Roboter gegen ein Hindernis, aktivierte das deutlich größere und schärfere Drucksignal einen separaten Schwellwert, wodurch das Fahrzeug zurückwich und weiteren Aufprall vermied. Selbst wenn Magnet- und Aufprallsignale überlappten, löste ihre kombinierte Stärke weiterhin eine Schutzreaktion aus, was zeigt, dass eine präzise Trennung der beiden Signale weniger wichtig ist als das zuverlässige Auslösen von Ausweichverhalten.
Was das für zukünftige Maschinen bedeutet
Kurz gesagt haben die Autoren einen weichen, selbstversorgenden Aufkleber entwickelt, der einem Roboter erlaubt, sowohl zu spüren, ob er etwas berührt, als auch eine unsichtbare magnetische Gefahr in der Nähe wahrzunehmen — und das mit demselben winzigen Bauteil. Durch die gezielte Auswahl von Flüssigkeiten, die auf Magnetfelder und Druck reagieren, und deren Kombination mit einer gemusterten Gummoberfläche erreichen sie die Leistung vieler gespeister Sensoren und übertreffen sie in einigen Punkten, während die Lösung dünn, flexibel und leicht integrierbar bleibt. Mit Verbesserungen für rauere Umgebungen und längere Lebensdauer könnten ähnliche Dualmodus-triboelektrische Sensoren künftig zur Standard-„Haut“ von Robotern und tragbaren Systemen werden und ihnen helfen, sicherer und intelligenter durch komplexe, oft unsichtbare Gefahren zu navigieren.
Zitation: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Schlüsselwörter: triboelektrischer Sensor, Ferrofluid, Magnetfeldmessung, Druckmessung, intelligente Roboter