Clear Sky Science · ja
磁気誘起変形が駆動する、磁場と接触圧を二重モードで感知するトリボエレクトリックセンサー
ロボットのスマートタッチと“第六感”
ロボットが発電所や病院、工場、災害現場などで活動するようになると、電子機器を誤動作させる強い磁場や、ロボットや周囲に損傷を与える衝突という二つの潜在的危険を避ける必要があります。本論文は、ロボットに二重の“第六感”を与える新しいソフトセンサーを紹介します。本センサーは、物理的に触れずに見えない磁場を感じることと、衝突時の物理的な圧力を感知することの両方が可能で、しかも運動から自身で電力を生み出します。
二つの感覚を組み合わせる意義
現在の多くのロボットは磁場と圧力を別個の機器で計測していますが、それらはしばしばかさばり、配線が必要だったり、狭い場所では扱いにくかったりします。既存の二重モードセンサーは外部電源や閉回路を必要とする従来の電子機器に依存することが多く、小型・無線・可搬システムには不向きです。著者らは、近接する磁気ハザードと物理的接触の両方を検出でき、柔軟で自己発電する単一のセンサーが、安全性の向上、配線と複雑さの削減、次世代自律機械のニーズにより適合すると主張します。
液体とゴムで作られたソフトセンサー
チームは二重モードのトリボエレクトリックセンサー(DM-TS)を設計しました。これは風船をこすった後に髪にくっつく現象と同じ接触電気化学の効果を応用しています。装置は伸縮性のシリコーンゴム枠に二種類の特殊液体を挟む構造です。下部の空洞にはフェロフルードと呼ばれる磁性流体を、上部の空洞には電極として働く液体金属合金を収めています。その間のシリコーン層には小さなスパイク状のパターンが刻まれています。スパイク状ゴムとフェロフルードが接触・離脱するたびに電荷が発生し、液体金属がそれを拾います。材料が柔らかいため、センサーは曲げたり伸ばしたりでき、曲面にフィットして良好な生体適合性を備えています。 
触れずに見えない磁場を“感じる”
磁場を感知する際、センサーは何かに触れる必要がありません。下方から磁石が近づくと、フェロフルードは磁力線に沿って再配列し、平坦な液面から上方へと鋭いスパイク状に立ち上がり、上側のシリコーンスパイクと噛み合います。これにより両表面の接触面積が大幅に増え、生成される電気信号が増強されます。永久磁石を近づけたり遠ざけたりする実験で、出力電圧は磁場強度とともに上昇し、有用な範囲で良好に線形性を保つことが示されました。バイアス電流や外部電源を必要とせずに、市販のホール素子に匹敵する感度に達することも可能です。さらに、横方向の磁石の動きも検出でき、速度と距離を符号化するより複雑な信号を得られるため、ロボットが危険領域に出入りする速度を把握するのに役立ちます。
軽いタッチから強い押し込みまで検知
DM-TSを圧力センサーとして用いると、上方から加わる力に反応します。荷重が上面を押すと、柔軟なシリコーンスパイクがフェロフルードに押し込まれ、接触面積が変化します。この圧力による変形が電圧パルスを生み、その振幅は力とともに増加します。興味深いことに、このセンサーは多くの標準的な圧力センサーとは異なり、高い圧力で感度が向上します。著者らはこれを二つの異なる変形モードと、圧力下でフェロフルードが濃縮する挙動に起因すると説明します。低荷重では主に液体金属電極の形状変化が支配的ですが、高荷重ではスパイクがフェロフルードと完全にかみ合い、粒子が密に詰まりより固体に近いネットワークを形成して電荷移動を増強します。試験した最大範囲では、封入空洞から液体が押し出されないようにする必要が主な制約となるものの、非常に高い圧力感度に到達します。 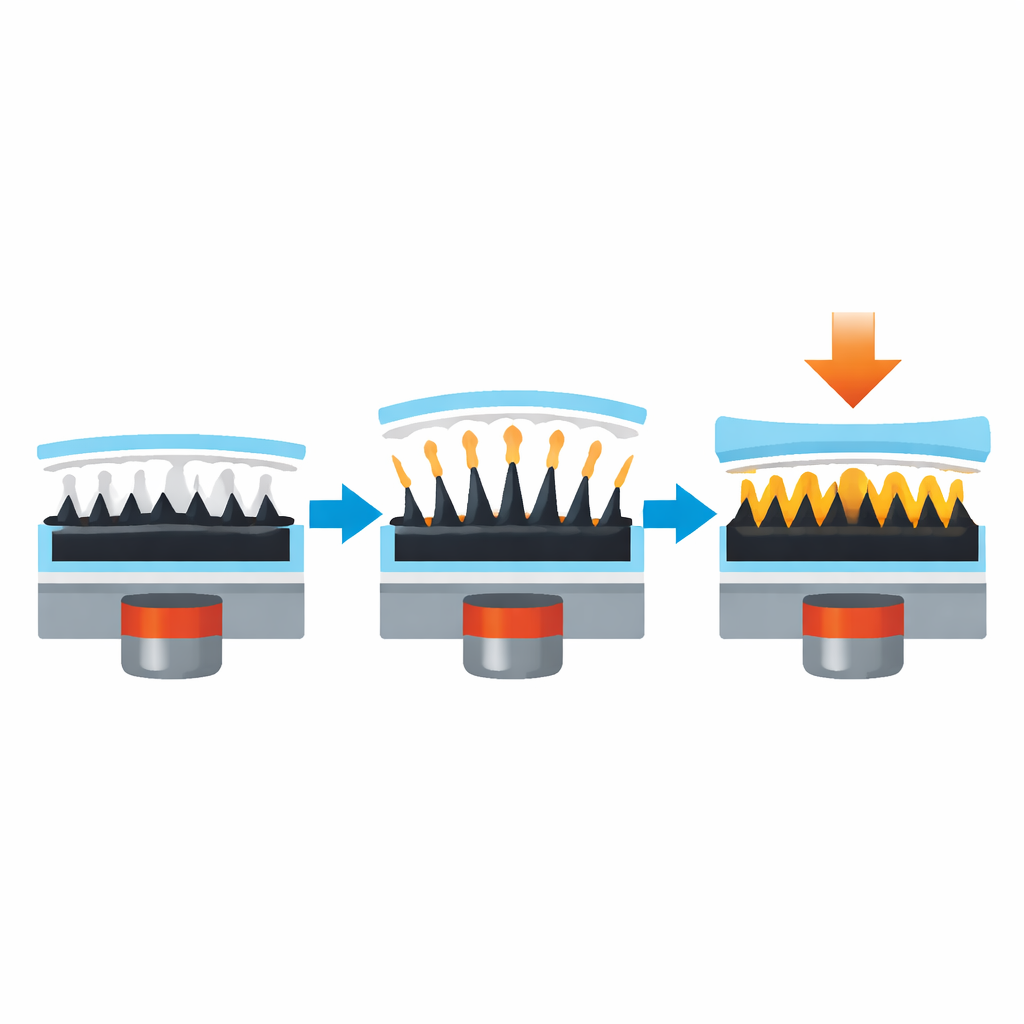
ロボットが危険を回避するのを支援
この二重感知が現実世界でどのように機能するかを示すために、研究者らはDM-TSを無人地上車両に取り付け、簡単な閾値検出回路とモータ制御器に接続しました。車両が強い磁石の近くを通過すると、センサー出力は所定の閾値を超えるまで増大し、制御器がモータを逆転させてロボットを磁気“ホットスポット”から遠ざけました。障害物に衝突したときは、より大きく鋭い圧力信号が別の閾値を作動させ、車両は後退してさらなる衝突を回避しました。磁気信号と衝突信号が重なっても、両者の合成強度が保護動作を駆動し、二つを厳密に分離するよりも回避行動を確実に発動することが重要であることを示しました。
将来の機械にとっての意義
平易に言えば、著者らはロボットが何かを押していることを感じると同時に、近くの見えない磁気ハザードを検知できる柔らかく自己発電するパッチを作り上げました。磁気や圧力に応答する液体を慎重に選び、パターン化されたゴム表面と組み合わせることで、多くの有電源センサーと同等以上の性能を、薄く柔軟で統合しやすい形で実現しています。これらの設計がより過酷な環境や長寿命向けに改良されれば、同様の二重モードトリボエレクトリックセンサーはロボットやウェアラブルシステムの標準的な“皮膚”になり、複雑で見えない危険を伴う環境でより安全かつ賢明に移動する手助けとなるでしょう。
引用: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
キーワード: トリボエレクトリックセンサー, フェロフルード, 磁場センシング, 圧力センシング, インテリジェントロボット