Clear Sky Science · pl
Odkształcenie wywołane polem magnetycznym napędzające triboelektryczny czujnik z dwoma trybami percepcji pola magnetycznego i ciśnienia kontaktowego
Inteligentny dotyk i „szósty zmysł” dla robotów
W miarę jak roboty trafiają do elektrowni, szpitali, fabryk i stref katastrof, muszą unikać dwóch ukrytych zagrożeń: silnych pól magnetycznych, które mogą zakłócać ich elektronikę, oraz kolizji, które mogą uszkodzić zarówno robota, jak i otoczenie. W artykule przedstawiono nowy miękki czujnik, który daje robotom rodzaj podwójnego „szóstego zmysłu” — potrafi wyczuwać zarówno niewidzialne pola magnetyczne bez dotyku, jak i fizyczne naciski przy zderzeniu, a przy tym sam generuje energię elektryczną z ruchu.
Dlaczego połączenie dwóch zmysłów ma znaczenie
Wiele współczesnych robotów używa już oddzielnych urządzeń do pomiaru pól magnetycznych i ciśnienia, ale są one często nieporęczne, wymagają zasilania przewodowego lub mają trudności działając w ciasnych przestrzeniach. Istniejące czujniki dwumodowe zwykle opierają się na tradycyjnej elektronice, która potrzebuje zewnętrznego zasilania i zamkniętych obwodów, co czyni je mniej odpowiednimi dla kompaktowych, bezprzewodowych lub mobilnych systemów. Autorzy argumentują, że pojedynczy, elastyczny, samonapędzany czujnik zdolny wykrywać zarówno zbliżające się zagrożenia magnetyczne, jak i kontakt fizyczny, poprawiłby bezpieczeństwo, zmniejszył liczbę okablowania i złożoność oraz lepiej odpowiadał potrzebom nowej generacji maszyn autonomicznych.
Miękki czujnik z cieczy i gumy
Zespół zaprojektował dwumodowy czujnik triboelektryczny, zwany DM-TS, który korzysta z tego samego podstawowego zjawiska, które powoduje przyciąganie balonu do włosów po pocieraniu — elektryzacji przez kontakt. Urządzenie zawiera dwie specjalne ciecze osadzone w rozciągliwej ramie z silikonu. Dolna komora mieści ciecz magnetyczną zwaną ferrofluidem, natomiast górna komora zawiera stop metalu ciekłego pełniący funkcję elektrody. Pomiędzy nimi znajduje się warstwa silikonu z wzorem maleńkich, kolczastych struktur. Gdy kolczasta guma i ferrofluid wchodzą ze sobą w kontakty i po nie, gromadzą się ładunki elektryczne, które odbierane są przez metal ciekły. Dzięki miękkim materiałom czujnik może się zginać, rozciągać i dopasowywać do krzywizn powierzchni robota, zachowując dobrą biokompatybilność. 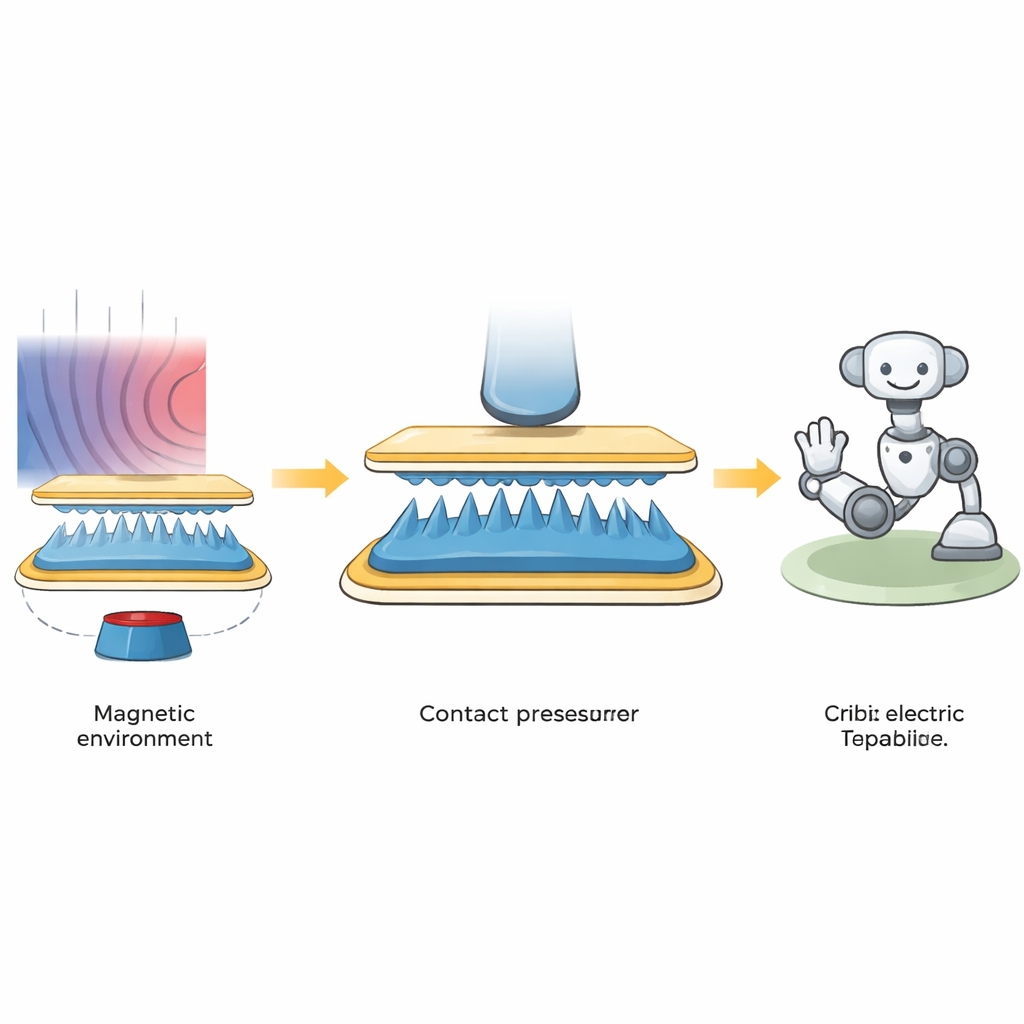
Wyczuwanie niewidzialnych pól magnetycznych bez dotyku
Aby wykryć pole magnetyczne, czujnik nie musi niczego dotykać. Gdy magnes zbliża się od dołu, ferrofluid reorganizuje się wzdłuż linii pola magnetycznego, podnosząc się z płaskiej warstwy do układu ostrych kolców, które zazębiają się z silikonowymi kolcami powyżej. To znacznie zwiększa pole styku między dwiema powierzchniami i wzmacnia generowany sygnał elektryczny. Poprzez przybliżanie i oddalanie magnesu badacze pokazali, że napięcie wyjściowe rośnie wraz z natężeniem pola magnetycznego i pozostaje ładnie liniowe w użytecznym zakresie, osiągając czułość zbliżoną do komercyjnych układów Halla — jednak bez potrzeby prądu polaryzującego czy zewnętrznego zasilania. Urządzenie potrafi też wykrywać ruch magnesu bocznie, generując bardziej złożone sygnały kodujące zarówno prędkość, jak i odległość, co mogłoby pomóc robotom mapować tempo wchodzenia w obszar niebezpieczny lub z niego wychodzenia.
Wykrywanie delikatnych dotknięć i silniejszych nacisków
W roli czujnika ciśnienia DM-TS reaguje na siły przykładane od góry. Gdy obciążenie naciska na górną powierzchnię, elastyczne silikonowe kolce są wciskane w ferrofluid, zmieniając obszar styku. Ta deformacja wywołana ciśnieniem generuje impulsy napięciowe, których amplituda rośnie wraz z siłą. Co ciekawe, czujnik staje się bardziej czuły przy wyższych ciśnieniach, w przeciwieństwie do wielu standardowych czujników ciśnienia. Autorzy przypisali to dwóm różnym trybom odkształcenia oraz temu, że ferrofluid zagęszcza się pod wpływem nacisku: przy niskich obciążeniach większość zmiany wynika z przekształcenia elektrody z metalu ciekłego, podczas gdy przy większych obciążeniach kolce zaczynają w pełni wchodzić w interakcję z ferrofluidem, a jego cząstki układają się bliżej, tworząc bardziej stałą sieć, która poprawia transfer ładunku. W najwyższym testowanym zakresie czujnik osiąga bardzo wysoką czułość na ciśnienie, ograniczoną głównie przez konieczność unikania wyciskania cieczy z uszczelnionych komór. 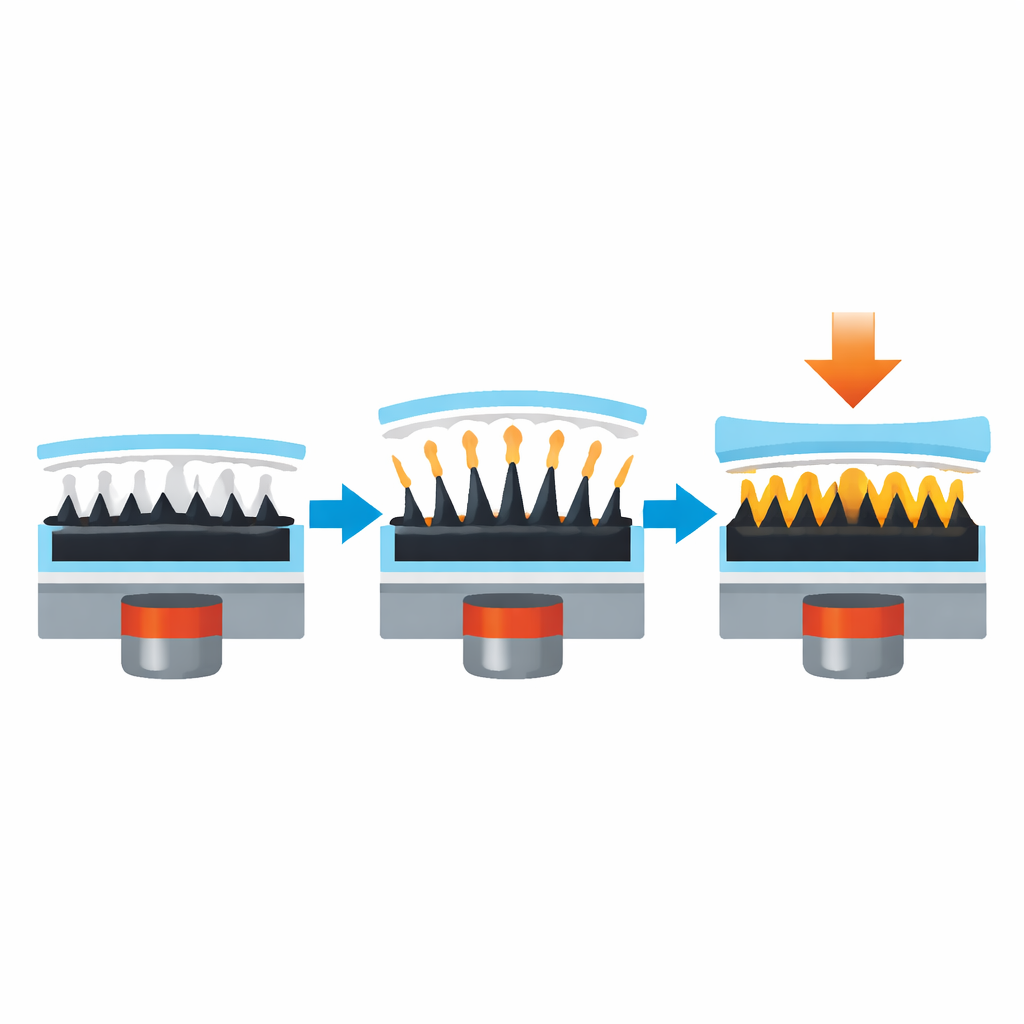
Pomaganie robotom w unikaniu zagrożeń
Aby pokazać, jak to podwójne wykrywanie działa w praktyce, badacze zamontowali DM-TS na bezzałogowym pojeździe lądowym i podłączyli go do prostego układu detekcji progowej oraz sterownika silników. Gdy pojazd przejeżdżał obok silnego magnesu, sygnał z czujnika narastał aż do przekroczenia ustawionego progu, wyzwalając sterownik do cofnięcia silników i skierowania robota z dala od magnetycznego „ogniska”. Gdy robot uderzył w przeszkodę, znacznie większy i ostrzejszy sygnał ciśnieniowy aktywował oddzielny próg, powodując cofnięcie pojazdu i uniknięcie dalszego uderzenia. Nawet gdy sygnały magnetyczne i kolizyjne nakładały się na siebie, ich skumulowana siła wciąż wywoływała reakcję ochronną, pokazując, że precyzyjne rozdzielenie obu trybów było mniej ważne niż niezawodne uruchomienie zachowania unikowego.
Co to oznacza dla przyszłych maszyn
Mówiąc prosto, autorzy zbudowali miękką, samonapędzaną płytkę, która pozwala robotowi jednocześnie wyczuwać nacisk na coś i wykrywać niewidzialne zagrożenie magnetyczne w pobliżu, używając tego samego niewielkiego urządzenia. Poprzez staranny dobór cieczy reagujących na magnesy i ciśnienie oraz połączenie ich z wzorzystą gumową powierzchnią, osiągnęli parametry dorównujące lub przewyższające wiele zasilanych czujników, przy zachowaniu cienkiej, elastycznej formy i łatwości integracji. W miarę udoskonalania tych projektów pod kątem trudniejszych warunków pracy i dłuższej żywotności, podobne dwumodowe czujniki triboelektryczne mogą stać się standardową „skórą” dla robotów i systemów ubieralnych, pomagając im poruszać się bezpieczniej i inteligentniej w skomplikowanych, niewidzialnych zagrożeniach.
Cytowanie: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Słowa kluczowe: czujnik triboelektryczny, ferrofluid, detekcja pola magnetycznego, detekcja ciśnienia, inteligentne roboty