Clear Sky Science · es
Deformación inducida por campo magnético que impulsa un sensor triboeléctrico con percepción en modo dual para campo magnético y presión de contacto
Toque inteligente y "sexto sentido" para robots
A medida que los robots se desplazan a centrales eléctricas, hospitales, fábricas y zonas de desastre, deben evitar dos peligros ocultos: campos magnéticos intensos que pueden perturbar su electrónica y colisiones que pueden dañar tanto al robot como a su entorno. Este artículo presenta un nuevo sensor blando que otorga a los robots una especie de "sexto sentido" dual: puede percibir tanto campos magnéticos invisibles sin tocarlos como la presión física cuando choca con algo, todo ello generando su propia electricidad a partir del movimiento.
Por qué importa combinar dos sentidos
Muchos robots modernos ya usan dispositivos separados para medir campos magnéticos y presión, pero estos a menudo son voluminosos, requieren alimentación por cable o tienen dificultades en espacios reducidos. Los sensores de modo dual existentes tienden a apoyarse en electrónica tradicional que necesita energía externa y circuitos cerrados, lo que los hace menos adecuados para sistemas compactos, inalámbricos o móviles. Los autores sostienen que un único sensor flexible y autosuficiente, capaz de detectar tanto peligros magnéticos cercanos como contacto físico, mejoraría la seguridad, reduciría cableado y complejidad, y se ajustaría mejor a las necesidades de máquinas autónomas de próxima generación.
Un sensor blando hecho de líquidos y caucho
El equipo diseñó un sensor triboeléctrico de modo dual, o DM-TS, que se basa en el mismo efecto básico que hace que un globo se pegue a tu cabello tras frotarlo: la electrificación por contacto. Su dispositivo encierra dos líquidos especiales dentro de un armazón de silicona elástica. La cavidad inferior contiene un líquido magnético llamado ferrofluido, mientras que la cavidad superior alberga una aleación de metal líquido que actúa como electrodo. Entre ellas hay una capa de silicona con un patrón de diminutas estructuras en forma de púa. Cuando la goma punteada y el ferrofluido entran y salen en contacto, se acumulan cargas eléctricas que son recogidas por el metal líquido. Debido a que los materiales son blandos, el sensor puede doblarse, estirarse y adaptarse a superficies curvas de robots con buena compatibilidad biológica. 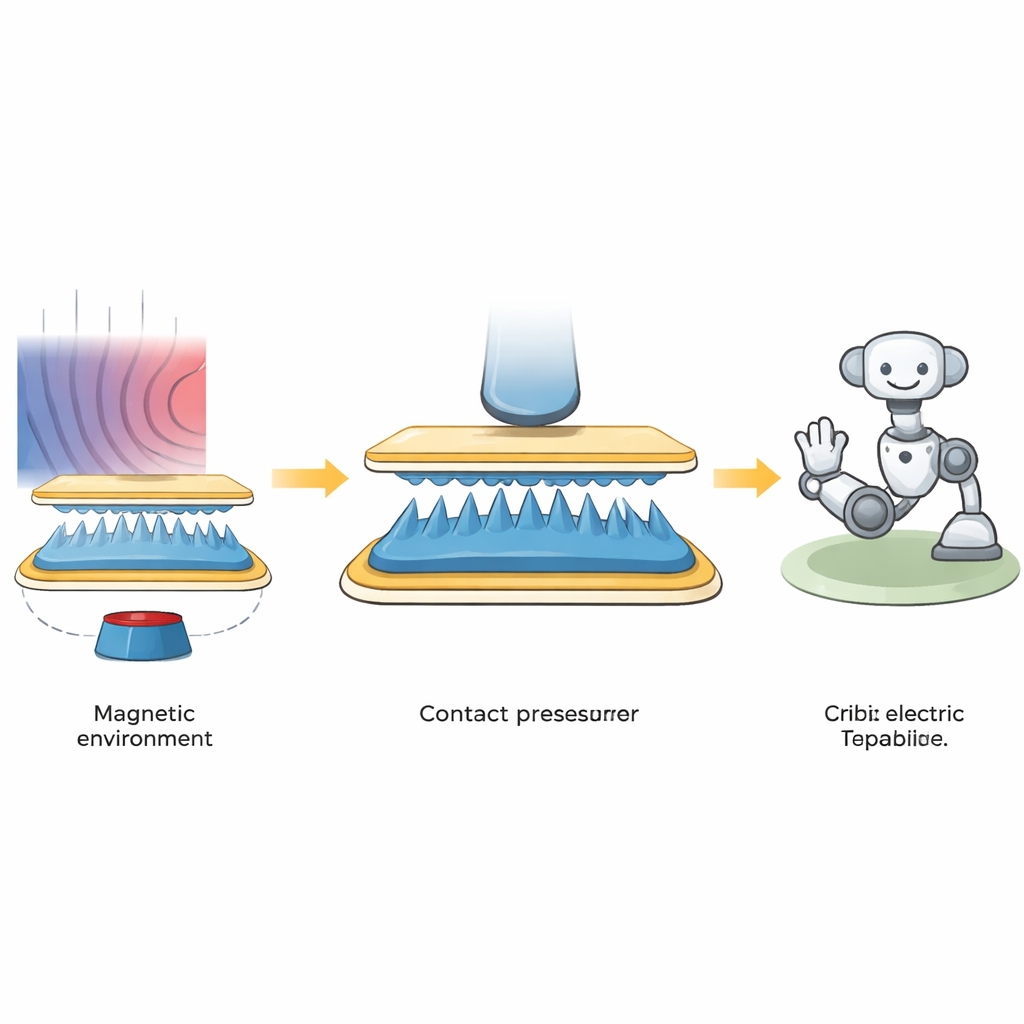
Detectar campos magnéticos invisibles sin contacto
Para detectar campos magnéticos, el sensor no necesita tocar nada. Cuando un imán se aproxima desde abajo, el ferrofluido se reorganiza a lo largo de las líneas magnéticas, elevándose de una piscina plana hacia una matriz de picos afilados que encajan con las púas de silicona superiores. Esto aumenta considerablemente el área de contacto entre las dos superficies y potencia la señal eléctrica que generan. Al mover un imán permanente más cerca y más lejos, los investigadores mostraron que el voltaje de salida aumenta con la intensidad del campo magnético y se mantiene bastante lineal en un rango útil, alcanzando una sensibilidad similar a la de chips comerciales de efecto Hall, pero sin necesitar corriente de polarización ni energía externa. El dispositivo también puede detectar movimientos laterales del imán, con señales más complejas que codifican tanto velocidad como distancia, lo que podría ayudar a los robots a mapear la rapidez con que entran o salen de zonas peligrosas.
Detectar toques suaves y empujones más fuertes
Cuando se usa como sensor de presión, el DM-TS responde a fuerzas aplicadas desde arriba. Al presionar una carga sobre la superficie superior, las púas flexibles de silicona se hunden en el ferrofluido, cambiando el área de contacto. Esta deformación inducida por presión genera pulsos de tensión cuya amplitud aumenta con la fuerza. Curiosamente, el sensor se vuelve más sensible a presiones mayores, a diferencia de muchos sensores de presión estándar. Los autores atribuyen este comportamiento a dos modos de deformación diferentes y a la forma en que el ferrofluido se hace más denso bajo presión: a cargas bajas, la mayor parte del cambio proviene de la remodelación del electrodo de metal líquido, mientras que a cargas más altas las púas contactan completamente con el ferrofluido y sus partículas se compactan, formando una red más sólida que mejora la transferencia de carga. En el rango más alto probado, el sensor alcanza una sensibilidad a la presión muy elevada, limitada principalmente por la necesidad de evitar exprimir líquido fuera de las cavidades selladas. 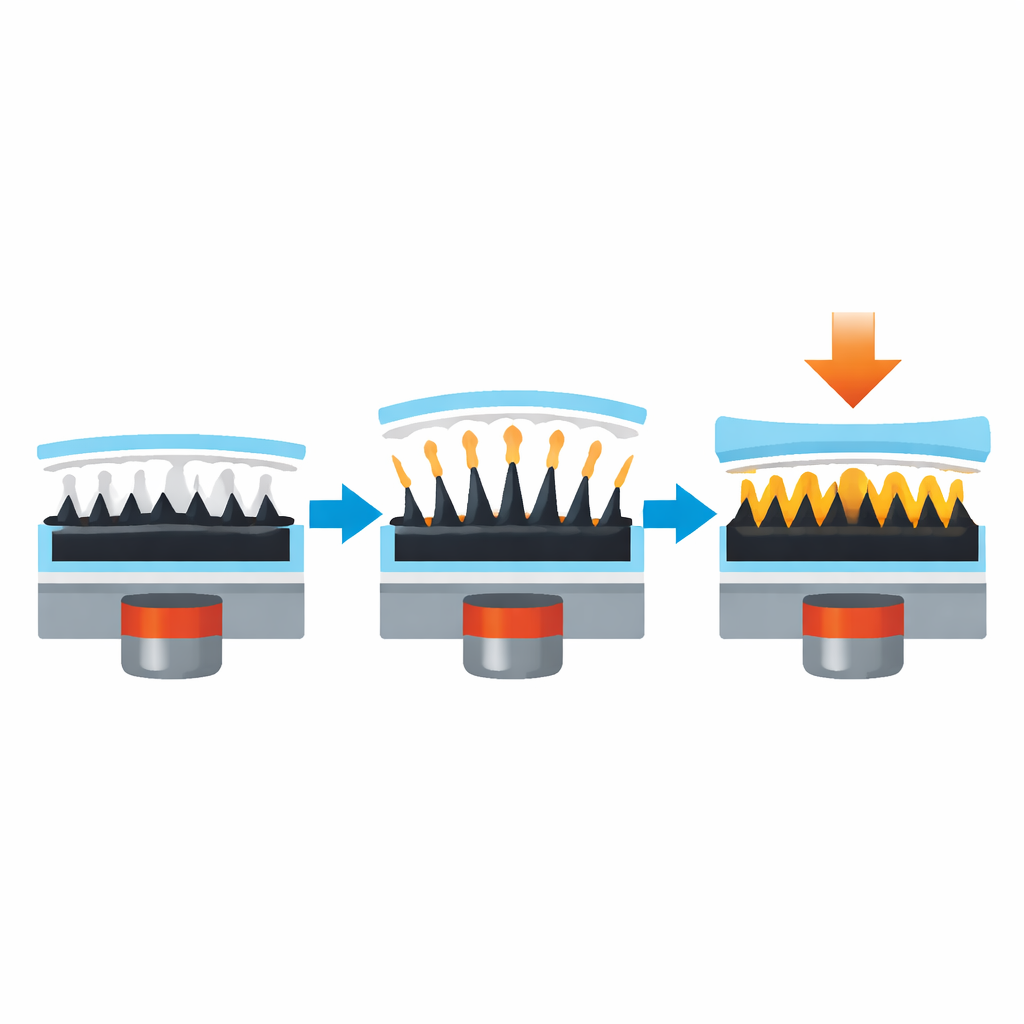
Ayudar a los robots a evitar el peligro
Para demostrar cómo podría funcionar esta detección dual en el mundo real, los investigadores montaron el DM-TS en un vehículo terrestre no tripulado y lo conectaron a un circuito sencillo de detección por umbral y a un controlador de motores. Cuando el vehículo pasó cerca de un imán potente, la salida del sensor creció hasta cruzar un límite preestablecido, lo que activó el controlador para invertir los motores y alejar el robot del "punto caliente" magnético. Cuando el robot chocó contra un obstáculo, la señal de presión, mucho mayor y más aguda, activó un umbral separado, provocando la retirada del vehículo para evitar impactos adicionales. Incluso cuando las señales magnéticas y de colisión se solapaban, su fuerza combinada siguió provocando una respuesta protectora, demostrando que la separación precisa de ambas no era tan importante como activar de forma fiable el comportamiento de evitación.
Qué significa esto para las máquinas del futuro
En términos simples, los autores han construido un parche blando y autosuficiente que permite a un robot tanto sentir que está presionando algo como detectar un peligro magnético invisible cercano, usando el mismo dispositivo diminuto. Al seleccionar cuidadosamente líquidos que responden a magnetismo y presión y emparejarlos con una superficie de caucho estriada, igualan o superan el rendimiento de muchos sensores alimentados, manteniéndose delgados, flexibles y fáciles de integrar. A medida que estos diseños se mejoren para entornos más duros y mayor vida útil, sensores triboeléctricos de modo dual similares podrían convertirse en la "piel" estándar de robots y sistemas vestibles, ayudándoles a moverse con mayor seguridad e inteligencia a través de peligros complejos e invisibles.
Cita: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Palabras clave: sensor triboeléctrico, ferrofluido, detección de campo magnético, detección de presión, robots inteligentes