Clear Sky Science · sv
Magnetisk-inducerad deformation som driver triboelektrisk sensor med dubbellägesperception för magnetfält och kontakttryck
Smart beröring och en "sjätte känsel" för robotar
När robotar rör sig in i kraftstationer, sjukhus, fabriker och katastrofområden måste de undvika två dolda risker: starka magnetfält som kan störa deras elektronik och kollisioner som kan skada både roboten och dess omgivning. Denna artikel presenterar en ny mjuk sensor som ger robotar en sorts dubbelläst "sjätte känsel" — den kan känna både osynliga magnetfält utan att röra vid dem och fysisk tryckkontakt när den stöter i något, samtidigt som den genererar sin egen elektricitet från rörelse.
Varför kombinationen av två sinnen spelar roll
Många moderna robotar använder redan separata enheter för att mäta magnetfält och tryck, men dessa är ofta skrymmande, kräver sladdförsörjning eller har svårt att fungera i trånga utrymmen. Befintliga dual-läges sensorer tenderar att förlita sig på traditionell elektronik som behöver extern ström och slutna kretsar, vilket gör dem mindre lämpliga för kompakta, trådlösa eller mobila system. Författarna menar att en enda, flexibel, självförsörjande sensor som kan detektera både närliggande magnetiska faror och fysisk kontakt skulle förbättra säkerheten, minska kablage och komplexitet och bättre motsvara behoven hos nästa generations autonoma maskiner.
En mjuk sensor byggd av vätskor och gummi
Teamet designade en dual-läges triboelektrisk sensor, eller DM-TS, som bygger på samma grundläggande effekt som gör att en ballong fastnar i håret efter gnuggning — kontaktladdning. Deras enhet kapslar in två specialvätskor i en töjbar silikonram. Den undre kammar innehåller en magnetisk vätska kallad ferrofluid, medan den övre kammaren innehåller en flytande metalllegering som fungerar som elektrod. Däremellan finns ett silikonlager mönstrat med små tagglika strukturer. När den taggiga silikonen och ferrofluiden kommer i kontakt eller separeras byggs elektriska laddningar upp och plockas upp av den flytande metallen. Eftersom materialen är mjuka kan sensorn böjas, tänjas och anpassas till krökta robotytor med god biokompatibilitet. 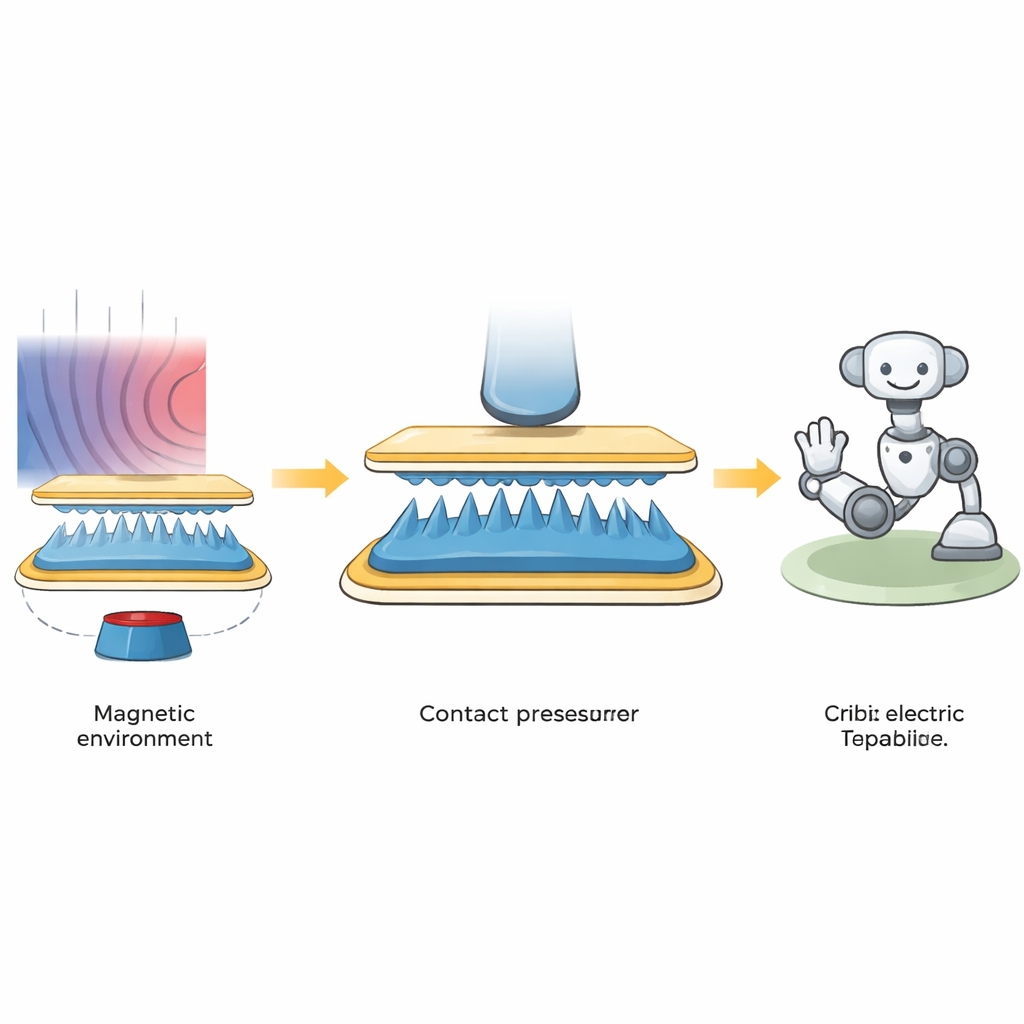
Känna osynliga magnetfält utan beröring
För att känna magnetfält behöver sensorn inte röra vid något. När en magnet närmar sig underifrån omorganiserar ferrofluiden sig längs magnetlinjerna och reser sig från en jämn pool till en matris av skarpa taggar som sammanfogar med silikonets taggar ovanför. Detta ökar kontaktområdet mellan de två ytorna avsevärt och förstärker den elektriska signalen de genererar. Genom att föra en permanentmagnet närmare och längre bort visade forskarna att utspänningen ökar med magnetfältets styrka och förblir fint linjär över ett användbart intervall, med en känslighet liknande kommersiella Hall-effektchip — men utan att behöva någon biasström eller extern strömförsörjning. Enheten kan också plocka upp sidledsrörelser hos magneten, med mer komplexa signaler som kodar både hastighet och avstånd, vilket kan hjälpa robotar att kartlägga hur snabbt de går in i eller lämnar farozoner.
Detektera lätta beröringar och starkare påtryckningar
När den används som trycksensor svarar DM-TS på krafter applicerade uppifrån. När en belastning trycker på topplagret pressas de flexibla silikon-taggarna ned i ferrofluiden och ändrar det område där de vidrör varandra. Denna tryckdrivna deformation ger upphov till voltpulsers vars amplitud ökar med kraften. Intressant nog blir sensorn mer känslig vid högre tryck, till skillnad från många standardtrycksensorer. Författarna spårade detta beteende till två olika deformationslägen och till hur ferrofluiden förtjockas under belastning: vid låga laster kommer det mesta av förändringen från omformningen av den flytande metallelektroden, medan vid högre laster engagerar taggarna fullt ut med ferrofluiden och dess partiklar packas tätare, vilket bildar ett mer solidlikt nätverk som förbättrar laddningsöverföringen. I det högsta testade intervallet når sensorn mycket hög tryckkänslighet, begränsad främst av behovet att undvika att pressa vätska ut ur de förseglade kamrarna. 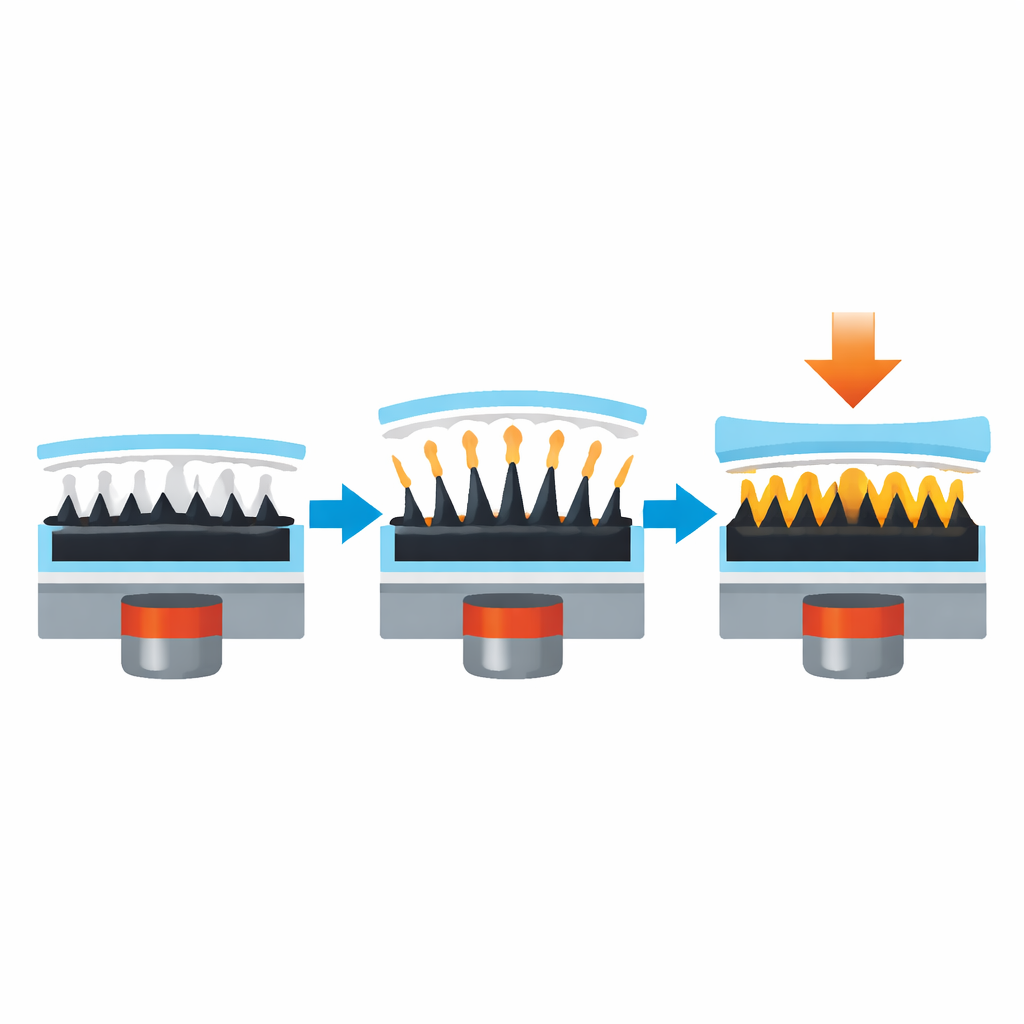
Hjälpa robotar att hålla sig borta från faror
För att visa hur denna dubbla sensing kan fungera i verkligheten monterade forskarna DM-TS på ett obemannat markfordon och kopplade det till en enkel tröskelavkänningskrets och en motorstyrning. När fordonet passerade nära en stark magnet ökade sensorsignalen tills den korsade en förinställd gräns, vilket triggade styrenheten att backa motorerna och styra roboten bort från det magnetiska "hot spot". När roboten stötte emot ett hinder aktiverades en mycket större och brantare trycksignal en separat tröskel, vilket fick fordonet att backa och undvika vidare kollision. Även när magnet- och kollisionssignaler överlappade var deras samlade styrka tillräcklig för att utlösa ett skyddsbeteende, vilket visar att en exakt separation av de två inte var lika viktigt som att pålitligt trigga undanmanövern.
Vad detta innebär för framtida maskiner
Kort sagt har författarna byggt en mjuk, självdriven platta som låter en robot både känna när den trycker mot något och upptäcka en osynlig magnetisk fara i närheten, med samma lilla enhet. Genom att noggrant välja vätskor som reagerar på magnetfält och tryck och kombinera dem med en mönstrad gummiyta motsvarar eller överträffar de prestandan hos många drivna sensorer samtidigt som de förblir tunna, flexibla och lätta att integrera. När dessa konstruktioner förbättras för tuffare miljöer och längre livslängd kan liknande dual-läges triboelektriska sensorer bli standard "hud" för robotar och bärbara system, vilket hjälper dem att röra sig säkrare och mer intelligent genom komplexa, osynliga faror.
Citering: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Nyckelord: triboelektrisk sensor, ferrofluid, magnetfältssensing, trycksensing, intelligenta robotar