Clear Sky Science · nl
Magnetisch-geïnduceerde vervorming die een tribo-elektrische sensor aandrijft met tweemodale waarneming voor magnetisch veld en contactdruk
Slim aanraken en een “zesde zintuig” voor robots
Naarmate robots worden ingezet in energiecentrales, ziekenhuizen, fabrieken en rampgebieden, moeten ze twee verborgen gevaren vermijden: sterke magnetische velden die hun elektronica kunnen verstoren, en botsingen die zowel de robot als de omgeving kunnen beschadigen. Dit artikel introduceert een nieuwe zachte sensor die robots een soort dubbel “zesde zintuig” geeft — hij kan zowel onzichtbare magnetische velden voelen zonder ze aan te raken als fysieke druk wanneer hij ergens tegenaan botst, terwijl hij zijn eigen elektriciteit opwekt uit beweging.
Waarom het combineren van twee zintuigen belangrijk is
Veel moderne robots gebruiken al afzonderlijke apparaten om magnetische velden en druk te meten, maar die zijn vaak log, hebben bekrachtiging nodig of werken slecht in krappe ruimtes. Bestaande tweemodale sensoren vertrouwen vaak op traditionele elektronica die externe voeding en gesloten circuits nodig heeft, waardoor ze minder geschikt zijn voor compacte, draadloze of mobiele systemen. De auteurs betogen dat een enkele, flexibele, zelf‑aangedreven sensor die zowel nabijgelegen magnetische gevaren als fysiek contact kan detecteren de veiligheid zou verbeteren, bedrading en complexiteit zou verminderen en beter zou aansluiten bij de behoeften van de volgende generatie autonome machines.
Een zachte sensor opgebouwd uit vloeistoffen en rubber
Het team ontwierp een tweemodale tribo-elektrische sensor, of DM-TS, die berust op hetzelfde basisverschijnsel dat een ballon aan je haar doet blijven plakken na wrijven — contactelektrificatie. Hun apparaat omsluit twee speciale vloeistoffen in een rekbaar siliconenrubberen frame. De onderste holte bevat een magnetische vloeistof genaamd ferrofluïd, terwijl de bovenste holte een vloeibaar metalen legering bevat die als elektrode fungeert. Tussen beide bevindt zich een siliconenrubberen laag met een patroon van kleine piekachtige structuren. Wanneer het gepiekte rubber en het ferrofluïd in en uit contact bewegen, bouwen elektrische ladingen zich op en worden ze opgepikt door het vloeibare metaal. Omdat de materialen zacht zijn, kan de sensor buigen, rekken en zich aanpassen aan gebogen robotoppervlakken met goede biocompatibiliteit. 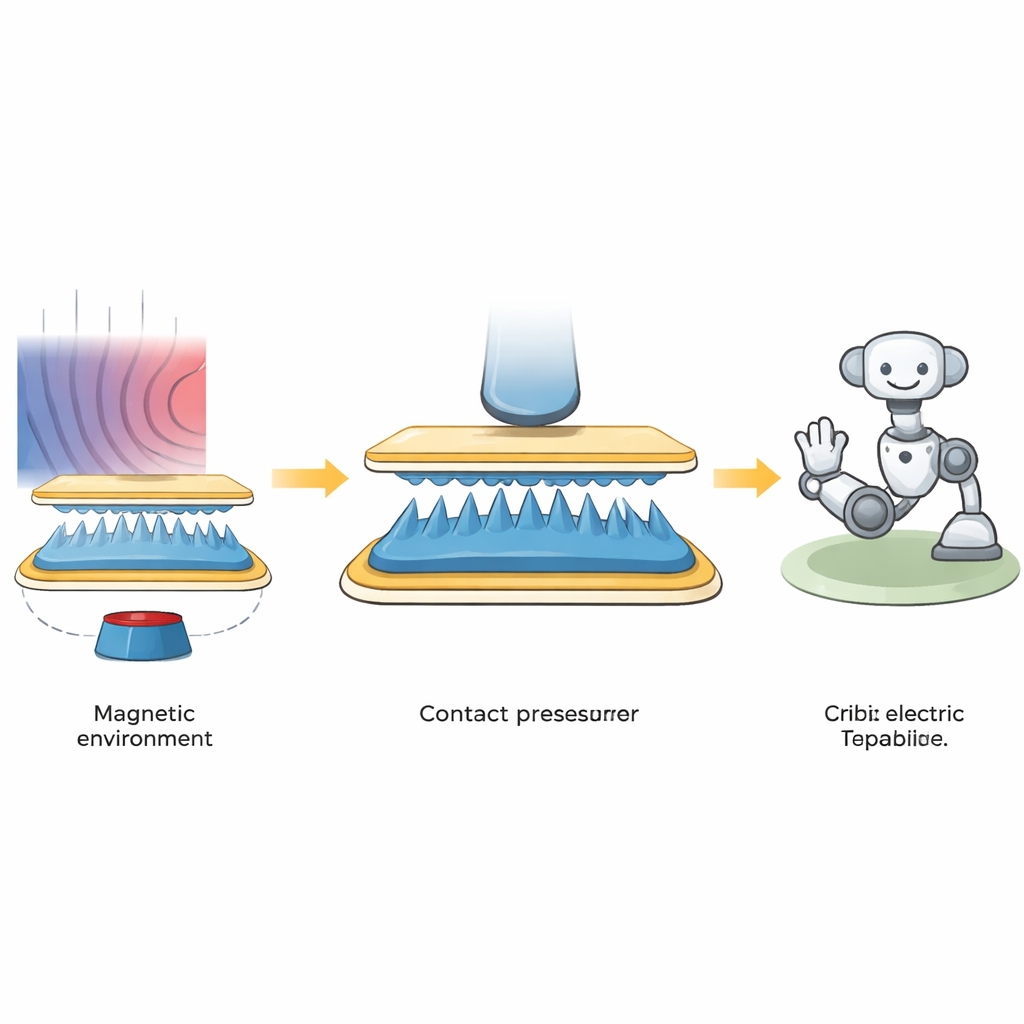
Onzichtbare magnetische velden voelen zonder aanraking
Om magnetische velden te detecteren hoeft de sensor niets aan te raken. Wanneer een magneet van onderen nadert, herschikt het ferrofluïd zich langs de magnetische veldlijnen en rijst het van een vlakke plas naar een reeks scherpe pieken die inwerken met de siliconenpieken erboven. Dit vergroot de contactoppervlakte tussen de twee oppervlakken sterk en versterkt het elektrische signaal dat ze genereren. Door een permanente magneet dichterbij en verder weg te bewegen, toonden de onderzoekers aan dat de uitgangsspanning toeneemt met de magnetische veldsterkte en keurig lineair blijft over een nuttig bereik, met een gevoeligheid vergelijkbaar met commerciële Hall‑effectchips — maar zonder dat er een biasstroom of externe voeding nodig is. Het apparaat kan ook zijwaartse magneetbewegingen oppikken, met complexere signalen die zowel snelheid als afstand coderen, wat robots kan helpen in kaart te brengen hoe snel ze gevaarzones naderen of verlaten.
Geleidelijke aanrakingen en krachtigere stoten detecteren
Wanneer de DM-TS als druksensor wordt gebruikt, reageert hij op krachten die van bovenaf worden uitgeoefend. Als een belasting op het bovenste oppervlak drukt, worden de flexibele siliconenpieken naar beneden in het ferrofluïd geduwd, waardoor het contactgebied verandert. Deze drukgedreven vervorming produceert spanningspulsen waarvan de hoogte toeneemt met de kracht. Interessant is dat de sensor bij hogere drukken gevoeliger wordt, in tegenstelling tot veel standaard druksensoren. De auteurs herleidden dit gedrag tot twee verschillende vervormingsmodi en tot de manier waarop het ferrofluïd onder druk verdikt: bij lage belastingen komt het grootste deel van de verandering door het herschikken van de vloeibare metalen elektrode, terwijl bij hogere belastingen de pieken volledig in contact treden met het ferrofluïd en de deeltjes dichter op elkaar komen te zitten, waardoor een meer solide netwerk ontstaat dat ladingsoverdracht versterkt. In het hoogste geteste bereik bereikt de sensor zeer hoge drukgevoeligheid, voornamelijk beperkt door de noodzaak te voorkomen dat vloeistof uit de verzegelde holtes wordt geperst. 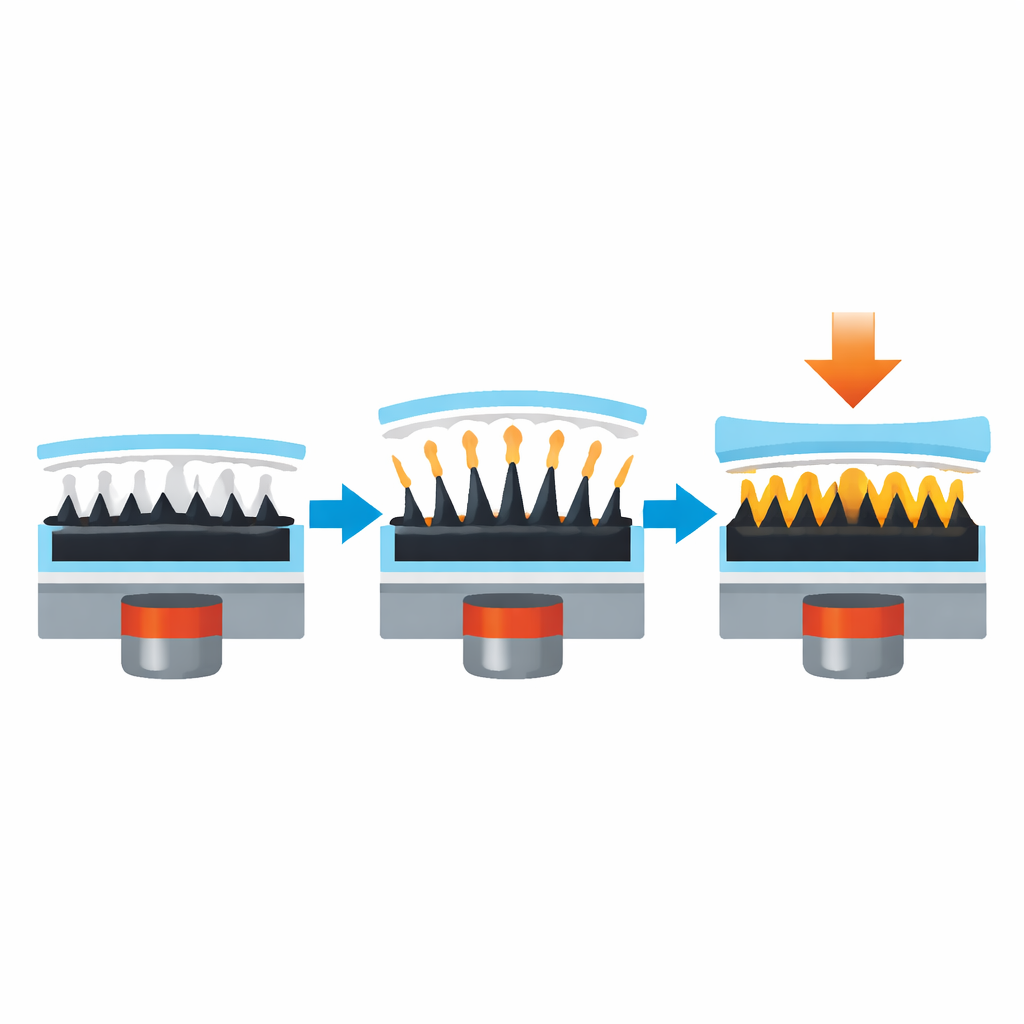
Robots helpen gevaar te vermijden
Om te laten zien hoe deze dubbele detectie in de praktijk kan werken, monteerden de onderzoekers de DM-TS op een onbemand rijdend voertuig en sloten ze het aan op een eenvoudige drempeldetectiekring en motorcontroller. Terwijl het voertuig dicht langs een sterke magneet reed, groeide het sensoruitgangssignaal totdat het een vooraf ingestelde limiet overschreed, waardoor de controller de motoren in omgekeerde richting liet draaien en de robot wegstuurde van het magnetische “hete punt”. Wanneer de robot tegen een obstakel botste, activeerde het veel grotere en scherpere druksignaal een aparte drempel, waardoor het voertuig terugweek en verdere impact werd vermeden. Zelfs wanneer magnetische en botsingssignalen overlappen, was hun gecombineerde sterkte nog steeds voldoende om een beschermende reactie te veroorzaken, wat aantoont dat strikte scheiding van de twee signalen minder belangrijk is dan het betrouwbaar activeren van ontwijkgedrag.
Wat dit betekent voor toekomstige machines
Kort gezegd hebben de auteurs een zachte, zelf‑aangedreven pleister ontwikkeld die een robot zowel laat voelen wanneer hij ergens tegenaan drukt als een onzichtbaar magnetisch gevaar in de buurt detecteert, met hetzelfde kleine apparaat. Door vloeistoffen zorgvuldig te kiezen die reageren op magneten en druk en deze te combineren met een gepatterned rubberoppervlak, evenaren of overtreffen ze de prestaties van veel gevoede sensoren terwijl ze dun, flexibel en gemakkelijk te integreren blijven. Naarmate deze ontwerpen worden verbeterd voor scherpere omgevingen en langere levensduur, zouden vergelijkbare tweemodale tribo-elektrische sensoren standaard “huid” kunnen worden voor robots en draagbare systemen, waardoor ze veiliger en intelligenter door complexe, onzichtbare gevaren kunnen bewegen.
Bronvermelding: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Trefwoorden: tribo-elektrische sensor, ferrofluïd, magnetische velddetectie, druksensor, intelligente robots