Clear Sky Science · it
Deformazione indotta da campo magnetico che guida un sensore triboelettrico con percezione a doppia modalità per campo magnetico e pressione di contatto
Tocco intelligente e “sesto senso” per i robot
Con l’ingresso dei robot in centrali elettriche, ospedali, fabbriche e zone di disastro, devono fronteggiare due pericoli nascosti: forti campi magnetici che possono mandare in tilt l’elettronica e collisioni che possono danneggiare sia il robot sia l’ambiente circostante. Questo articolo presenta un nuovo sensore morbido che offre ai robot una sorta di doppio “sesto senso”: è in grado di percepire sia campi magnetici invisibili senza contatto sia la pressione fisica in caso di urto, generando al contempo la propria energia elettrica a partire dal movimento.
Perché è importante combinare due sensi
Molti robot moderni utilizzano già dispositivi separati per misurare campi magnetici e pressione, ma questi spesso sono ingombranti, richiedono alimentazione cablata o non funzionano bene in spazi ristretti. I sensori dual-mode esistenti tendono a basarsi su elettronica tradizionale che necessita di alimentazione esterna e circuiti chiusi, rendendoli meno adatti a sistemi compatti, wireless o mobili. Gli autori sostengono che un singolo sensore flessibile e autoalimentato, in grado di rilevare sia pericoli magnetici vicini sia il contatto fisico, migliorerebbe la sicurezza, ridurrebbe cablaggi e complessità e si adatterebbe meglio alle esigenze delle macchine autonome di nuova generazione.
Un sensore morbido fatto di liquidi e gomma
Il gruppo ha progettato un sensore triboelettrico a doppia modalità, o DM-TS, che sfrutta lo stesso effetto di base per cui un palloncino si attacca ai capelli dopo essere stato strofinato: l’elettrificazione da contatto. Il dispositivo racchiude due liquidi speciali all’interno di una cornice di silicone elastico. La cavità inferiore contiene un liquido magnetico chiamato ferrofluido, mentre la cavità superiore ospita una lega metallica liquida che funge da elettrodo. Tra di loro c’è uno strato di silicone caratterizzato da piccole punte a forma di spike. Quando la gomma punteggiata e il ferrofluido entrano in contatto e si separano, si accumulano cariche elettriche che vengono raccolte dal metallo liquido. Poiché i materiali sono morbidi, il sensore può flettersi, allungarsi e adattarsi a superfici curve dei robot con buona biocompatibilità. 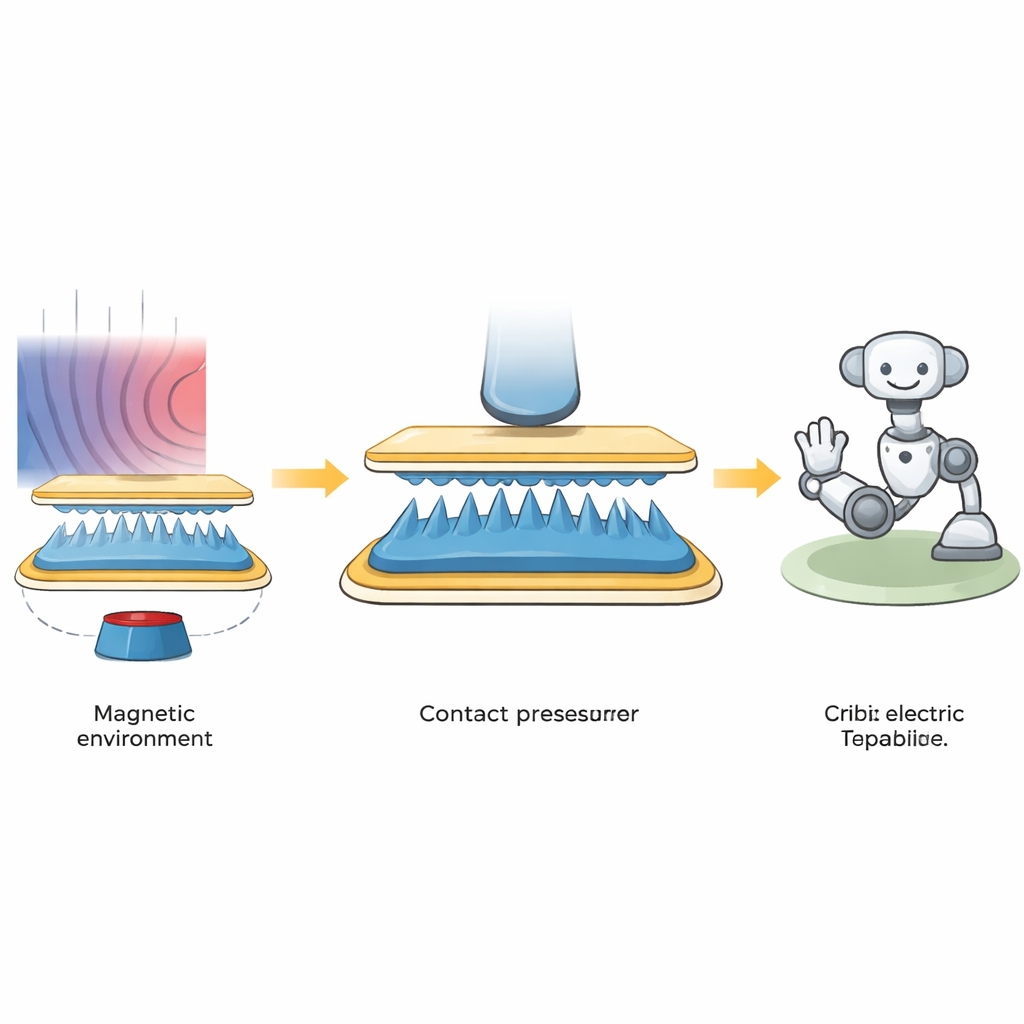
Percepire campi magnetici invisibili senza toccare
Per rilevare i campi magnetici, il sensore non deve toccare nulla. Quando un magnete si avvicina dal basso, il ferrofluido si riorganizza lungo le linee del campo magnetico, salendo da una pozza piatta fino a formare una serie di punte affilate che si incastrano con le spike di silicone soprastanti. Questo aumenta notevolmente l’area di contatto tra le due superfici e potenzia il segnale elettrico che producono. Muovendo un magnete permanente più vicino o più lontano, i ricercatori hanno mostrato che la tensione di uscita cresce con l’intensità del campo magnetico e rimane sufficientemente lineare su un intervallo utile, raggiungendo una sensibilità simile ai chip commerciali ad effetto Hall — ma senza bisogno di corrente di polarizzazione o alimentazione esterna. Il dispositivo può anche rilevare il movimento laterale del magnete, con segnali più complessi che codificano sia velocità sia distanza, il che potrebbe aiutare i robot a mappare con che rapidità stanno entrando o uscend o da zone pericolose.
Rilevare tocchi leggeri e spinte più forti
Quando è usato come sensore di pressione, il DM-TS risponde a forze applicate dall’alto. Man mano che un carico preme sulla superficie superiore, le spike di silicone flessibili vengono spinte verso il basso nel ferrofluido, modificando l’area di contatto. Questa deformazione indotta dalla pressione genera impulsi di tensione la cui ampiezza aumenta con la forza. È interessante che il sensore diventi più sensibile a pressioni maggiori, al contrario di molti sensori di pressione standard. Gli autori hanno ricondotto questo comportamento a due diverse modalità di deformazione e al modo in cui il ferrofluido si addensa sotto pressione: a carichi bassi, la maggior parte del cambiamento deriva dalla rimodellazione dell’elettrodo di metallo liquido, mentre a carichi più elevati le spike si impegnano completamente con il ferrofluido e le sue particelle si compattano, formando una rete più solida che migliora il trasferimento di carica. Nell’intervallo massimo testato, il sensore raggiunge una sensibilità alla pressione molto elevata, limitata principalmente dall’esigenza di evitare l’estrusione del liquido dalle cavità sigillate. 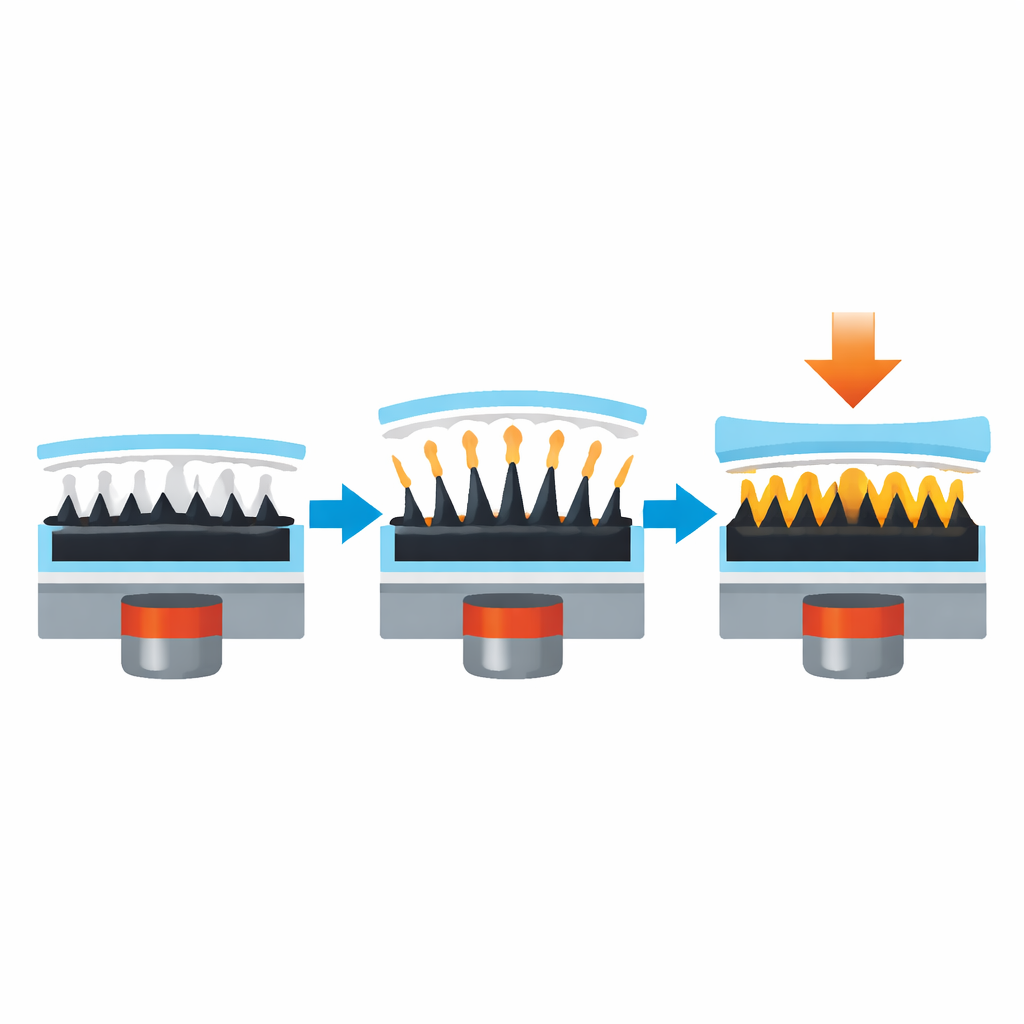
Aiutare i robot a evitare i pericoli
Per dimostrare come questa doppia percezione possa funzionare nel mondo reale, i ricercatori hanno montato il DM-TS su un veicolo terrestre senza pilota e lo hanno collegato a un semplice circuito di rilevamento a soglia e a un controller dei motori. Quando il veicolo passava vicino a un forte magnete, l’uscita del sensore aumentava fino a superare un limite preimpostato, attivando il controller che invertiva i motori e allontanava il robot dal “punto caldo” magnetico. Quando il robot urtava un ostacolo, il segnale di pressione, molto più ampio e netto, attivava una soglia separata, facendo indietreggiare il veicolo per evitare ulteriori impatti. Anche quando i segnali magnetici e da collisione si sovrapponevano, la loro forza combinata attivava comunque una risposta protettiva, dimostrando che la separazione precisa dei due segnali era meno importante rispetto alla capacità di innescare in modo affidabile il comportamento di evitamento.
Cosa significa per le macchine future
In termini semplici, gli autori hanno costruito una toppa morbida e autoalimentata che permette a un robot sia di sentire quando preme su qualcosa sia di percepire un pericolo magnetico invisibile nelle vicinanze, usando lo stesso piccolo dispositivo. Selezionando con cura liquidi che rispondono a magneti e pressione e abbinandoli a una superficie in gomma sagomata, raggiungono o superano le prestazioni di molti sensori alimentati mantenendo sottigliezza, flessibilità e facilità d’integrazione. Man mano che questi progetti verranno migliorati per ambienti più gravosi e per durate maggiori, sensori triboelettrici dual-mode simili potrebbero diventare la “pelle” standard per robot e sistemi indossabili, aiutandoli a muoversi in modo più sicuro e intelligente attraverso rischi complessi e invisibili.
Citazione: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Parole chiave: sensore triboelettrico, ferrofluidi, rilevamento campo magnetico, rilevamento pressione, robot intelligenti