Clear Sky Science · ar
تحويل التشوه الناجم عن المجال المغناطيسي إلى جهاز قياس كهربائي احتكاكي بحساسية مزدوجة للمجال المغناطيسي والضغط الملامس
لمس ذكي و"الحاسة السادسة" للروبوتات
مع انتشار الروبوتات في محطات الطاقة والمستشفيات والمصانع ومناطق الكوارث، يجب عليها تجنب خطرين خفيين: الحقول المغناطيسية القوية التي قد تخرّب إلكترونياتها، والاصطدامات التي قد تتلف الروبوت ومحيطه. تستعرض هذه الورقة جهاز استشعار لين جديد يمنح الروبوتات نوعًا من "الحاسة السادسة" المزدوجة—قادر على اكتشاف الحقول المغناطيسية غير المرئية دون لمسها والشعور بالضغط الفيزيائي عند الاصطدام بشيء، وكل ذلك بينما يولد الجهاز طاقته الكهربائية من الحركة نفسها.
لماذا يهم الجمع بين الحاستين
تستخدم العديد من الروبوتات الحديثة بالفعل أجهزة منفصلة لقياس المجال المغناطيسي والضغط، لكن هذه الأجهزة غالبًا ما تكون ضخمة وتتطلب طاقة سلكية أو تعاني في المساحات الضيقة. تميل أجهزة الاستشعار ثنائية الوضع الحالية إلى الاعتماد على إلكترونيات تقليدية تحتاج طاقة خارجية ودوائر مغلقة، مما يجعلها أقل ملاءمة للأنظمة المدمجة واللاسلكية أو المتنقلة. يجادل المؤلفون بأن مستشعرًا واحدًا مرنًا ومزودًا بالطاقة الذاتية قادرًا على اكتشاف كل من المخاطر المغناطيسية القريبة والاتصال الفيزيائي سيحسن السلامة ويقلل الكابلات والتعقيد، ويطابق احتياجات الآلات المستقلة من الجيل القادم بشكل أفضل.
مستشعر لين مبني من سوائل ومطاط
صمم الفريق مستشعرًا احتكاكيًا ثنائي الوضع، أطلقوا عليه DM-TS، يعتمد على نفس التأثير الأساسي الذي يجعل البالون يلتصق بشعرك بعد فركه—التكهرب بالتماس. يجسد جهازهم سوائل خاصة داخل إطار من مطاط السيليكون القابل للتمدد. يحتوي التجويف السفلي على سائل مغناطيسي يسمى السائل الحديدي، بينما يحمل التجويف العلوي سبيكة سائلة تعمل كقطب كهربائي. بينهما توجد طبقة من مطاط السيليكون مزخرفة بهياكل دقيقة تشبه الأشواك. عندما تتحرك الأشواك المطاطية والسائل الحديدي لتلامسا وتنفصلا، تتراكم شحنات كهربائية تلتقطها السبيكة السائلة. وبما أن المواد لينة، يمكن للمستشعر الانحناء والتمدد والالتصاق بأسطح روبوتية منحنية مع توافق حيوي جيد. 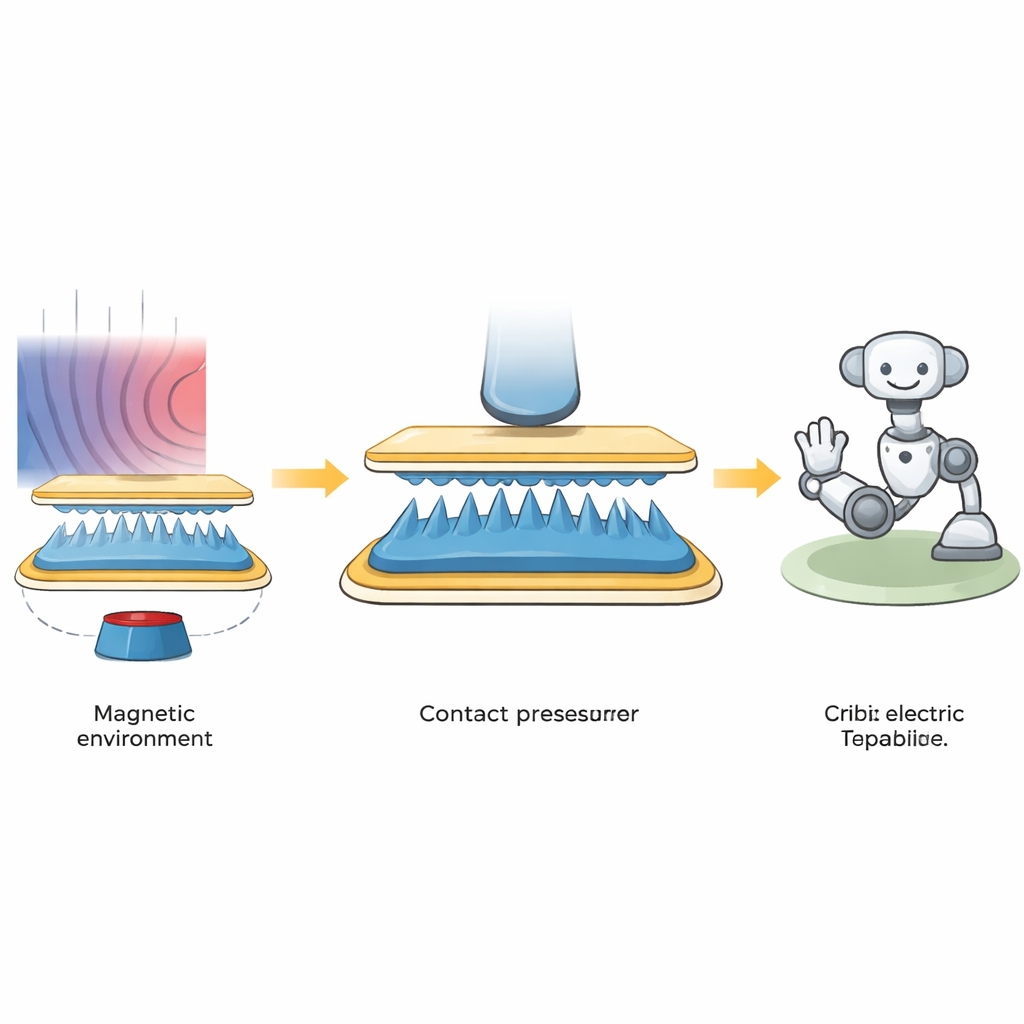
الشعور بالحقول المغناطيسية غير المرئية دون لمس
لا يحتاج المستشعر إلى لمس أي شيء لاستشعار الحقول المغناطيسية. عندما يقترب مغناطيس من الأسفل، يعيد السائل الحديدي ترتيب نفسه على طول خطوط المجال المغناطيسي، مرتفعًا من مستجمع مسطح إلى مصفوفة من الأشواك الحادة التي تتقابل مع أشواك السيليكون أعلاه. يزيد هذا بشكل كبير مساحة التماس بين السطحين ويعزز الإشارة الكهربائية الناتجة. بتحريك مغناطيس دائم أقرب وأبعد، أظهر الباحثون أن جهد الخرج يرتفع مع قوة المجال المغناطيسي ويبقى خطيًا ضمن نطاق مفيد، محققًا حساسية مماثلة لرقائق تأثير هول التجارية—ولكن دون الحاجة لأي تيار تحيز أو طاقة خارجية. يمكن للجهاز أيضًا التقاط حركة المغناطيس جانبًا إلى جانب، بإشارات أكثر تعقيدًا تشفر كلًا من السرعة والمسافة، ما قد يساعد الروبوتات على رسم خريطة لمعدل دخولها أو خروجها من مناطق خطر.
كشف اللمسات الرقيقة والدفعات الأقوى
عند استخدامه كمستشعر ضغط، يستجيب DM-TS للقوى المطبقة من الأعلى. مع ضغط حمولة على السطح العلوي، تُدفع أشواك السيليكون المرنة إلى الأسفل داخل السائل الحديدي، مما يغير مساحة التماس. هذا التشوه الناتج عن الضغط يولد نبضات جهد تزداد في الارتفاع مع القوة. ومن المثير للاهتمام أن المستشعر يصبح أكثر حساسية عند الضغوط الأعلى، على عكس العديد من مستشعرات الضغط القياسية. عزى المؤلفون هذا السلوك إلى وضعين للتشوه وإلى طريقة تماسك السائل الحديدي تحت الضغط: عند الأحمال المنخفضة، يأتي معظم التغيير من إعادة تشكيل القطب السائل، بينما عند الأحمال الأعلى، تدخل الأشواك في تلامس كامل مع السائل الحديدي، وتقترب جسيماته بعضها من بعض، مكونة شبكة تشبه الصلب تعزز نقل الشحنة. في أعلى نطاق تم اختباره، يصل المستشعر إلى حساسية ضغط عالية للغاية، يحدها أساسًا تجنب عصر السائل خارج التجاويف المختومة. 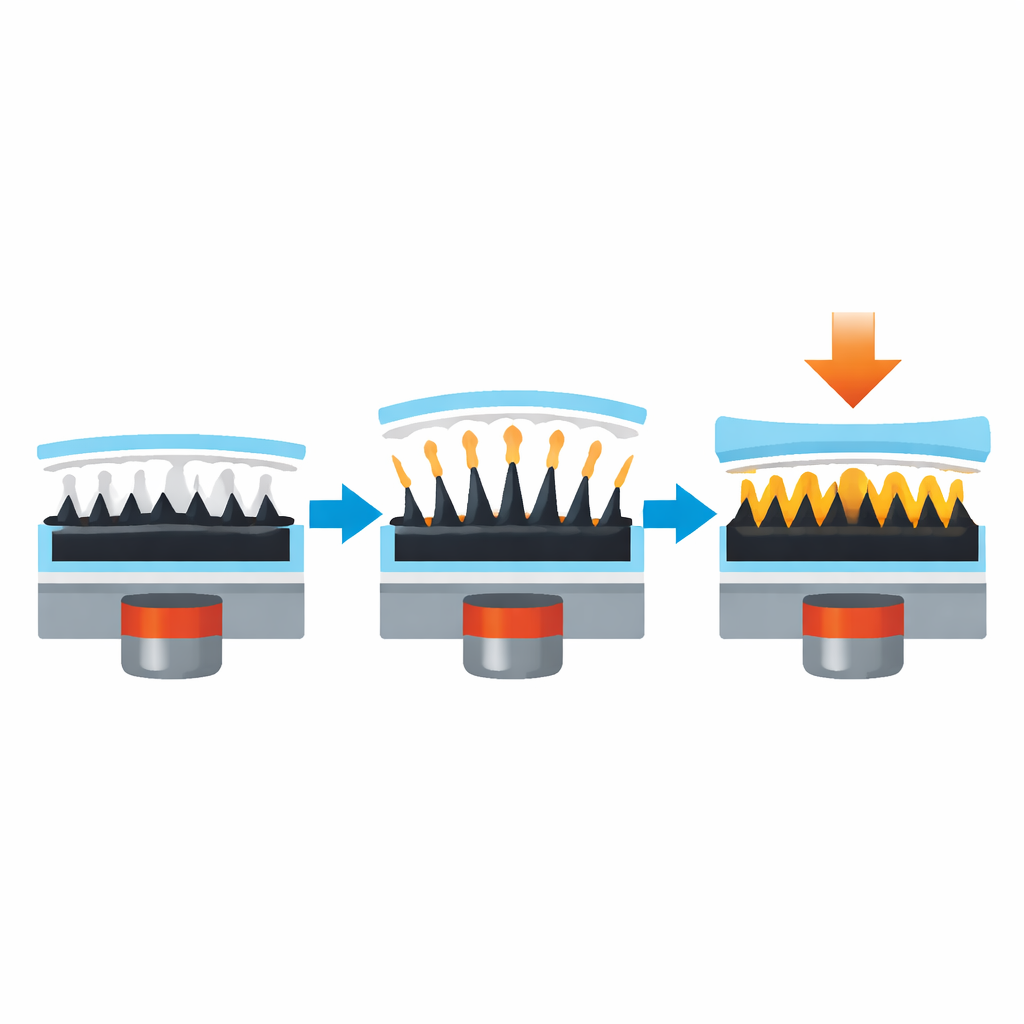
مساعدة الروبوتات على تجنب الخطر
لإظهار كيف يمكن أن تعمل هذه الحسية المزدوجة في العالم الحقيقي، ركب الباحثون DM-TS على مركبة برية بدون طيار وربطوه بدائرة كشف عتبية بسيطة ووحدة تحكم بالمحرك. عندما مرت المركبة قرب مغناطيس قوي، نما خرج المستشعر حتى عبر حدًا محددًا مسبقًا، فأطلقت وحدة التحكم عكس اتجاه المحركات وأوجهت الروبوت بعيدًا عن "البقعة الساخنة" المغناطيسية. وعند اصطدام الروبوت بعائق، فعّلت إشارة الضغط الأكبر والأشده حدًا منفصلاً، مما أدى إلى تراجع المركبة وتجنب مزيد من الاصطدام. حتى عندما تداخلت إشارات المجال المغناطيسي والاصطدام، كانت قوتهما المشتركة كافية لدفع استجابة حماية، مما يدل على أن الفصل الدقيق بين النوعين كان أقل أهمية من تحفيز سلوك تجنبي موثوق.
ما الذي يعنيه هذا للآلات المستقبلية
ببساطة، بنى المؤلفون لاصقًا لينًا يعمل بذاته يمكّن الروبوت من الشعور بكل من الضغط المطبق عليه واستشعار خطر مغناطيسي غير مرئي قريب، باستخدام نفس الجهاز الدقيق. عبر اختيار السوائل التي تستجيب للمغناطيس والضغط ودمجها مع سطح مطاطي مزخرف، يطابقون أو يتفوقون على أداء العديد من المستشعرات الممدودة بمصادر طاقة، بينما يبقون نحيفين ومرنين وسهل الدمج. مع تحسين هذه التصاميم لتتحمل بيئات أكثر قسوة وعمرًا أطول، قد تصبح أجهزة الاستشعار الاحتكاكية ثنائية الوضع هذه "جلدًا" قياسيًا للروبوتات والأنظمة القابلة للارتداء، مما يساعدها على الحركة بأمان وذكاء أكبر عبر مخاطر مخفية ومعقدة.
الاستشهاد: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
الكلمات المفتاحية: جهاز قياس كهربائي احتكاكي, السائل الحديدي, استشعار المجال المغناطيسي, استشعار الضغط, الروبوتات الذكية