Clear Sky Science · en
Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure
Smart touch and "sixth sense" for robots
As robots move into power stations, hospitals, factories, and disaster zones, they must avoid two hidden dangers: strong magnetic fields that can scramble their electronics, and collisions that can damage both the robot and its surroundings. This paper introduces a new soft sensor that gives robots a kind of dual "sixth sense"—it can feel both invisible magnetic fields without touching them and physical pressure when it bumps into something, all while generating its own electricity from motion.
Why combining two senses matters
Many modern robots already use separate devices to measure magnetic fields and pressure, but these are often bulky, require wired power, or struggle in tight spaces. Existing dual-mode sensors tend to rely on traditional electronics that need external power and closed circuits, which makes them less suitable for compact, wireless, or mobile systems. The authors argue that a single, flexible, self-powered sensor that can detect both nearby magnetic hazards and physical contact would improve safety, reduce wiring and complexity, and better match the needs of next-generation autonomous machines.
A soft sensor built from liquids and rubber
The team designed a dual-mode triboelectric sensor, or DM-TS, that relies on the same basic effect that makes a balloon cling to your hair after rubbing—contact electrification. Their device sandwiches two special liquids inside a stretchable silicone rubber frame. The lower cavity holds a magnetic liquid called ferrofluid, while the upper cavity contains a liquid metal alloy that serves as the electrode. Between them is a silicone rubber layer patterned with tiny spike-like structures. When the spiked rubber and the ferrofluid move into and out of contact, electrical charges build up and are picked up by the liquid metal. Because the materials are soft, the sensor can bend, stretch, and fit onto curved robot surfaces with good biocompatibility. 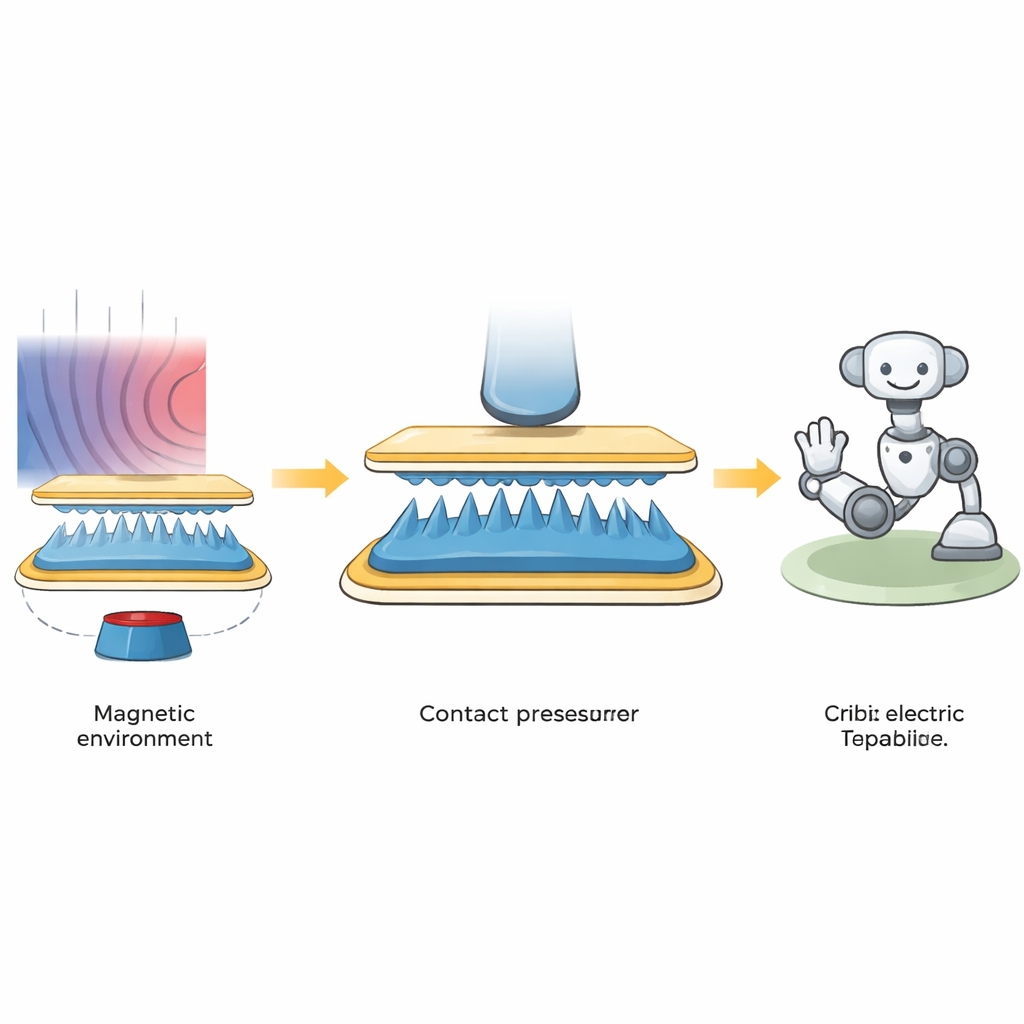
Feeling invisible magnetic fields without touch
To sense magnetic fields, the sensor does not need to touch anything. When a magnet approaches from below, the ferrofluid reorganizes itself along the magnetic lines, rising from a flat pool into an array of sharp spikes that mesh with the silicone spikes above. This greatly increases the contact area between the two surfaces and boosts the electrical signal they generate. By moving a permanent magnet closer and farther away, the researchers showed that the output voltage rises with magnetic field strength and stays nicely linear over a useful range, reaching a sensitivity similar to commercial Hall effect chips—but without needing any bias current or external power. The device can also pick up side-to-side magnet motion, with more complex signals that encode both speed and distance, which could help robots map how quickly they are entering or leaving dangerous zones.
Detecting gentle touches and stronger pushes
When used as a pressure sensor, the DM-TS responds to forces applied from above. As a load presses on the top surface, the flexible silicone spikes are pushed down into the ferrofluid, changing the area where they touch. This pressure-driven deformation produces voltage pulses whose height increases with force. Interestingly, the sensor becomes more sensitive at higher pressures, unlike many standard pressure sensors. The authors traced this behavior to two different deformation modes and to the way the ferrofluid thickens under pressure: at low loads, most of the change comes from reshaping the liquid metal electrode, while at higher loads, the spikes fully engage with the ferrofluid, and its particles pack closer, forming a more solid-like network that enhances charge transfer. In the highest tested range, the sensor reaches very high pressure sensitivity, limited mainly by the need to avoid squeezing liquid out of the sealed cavities. 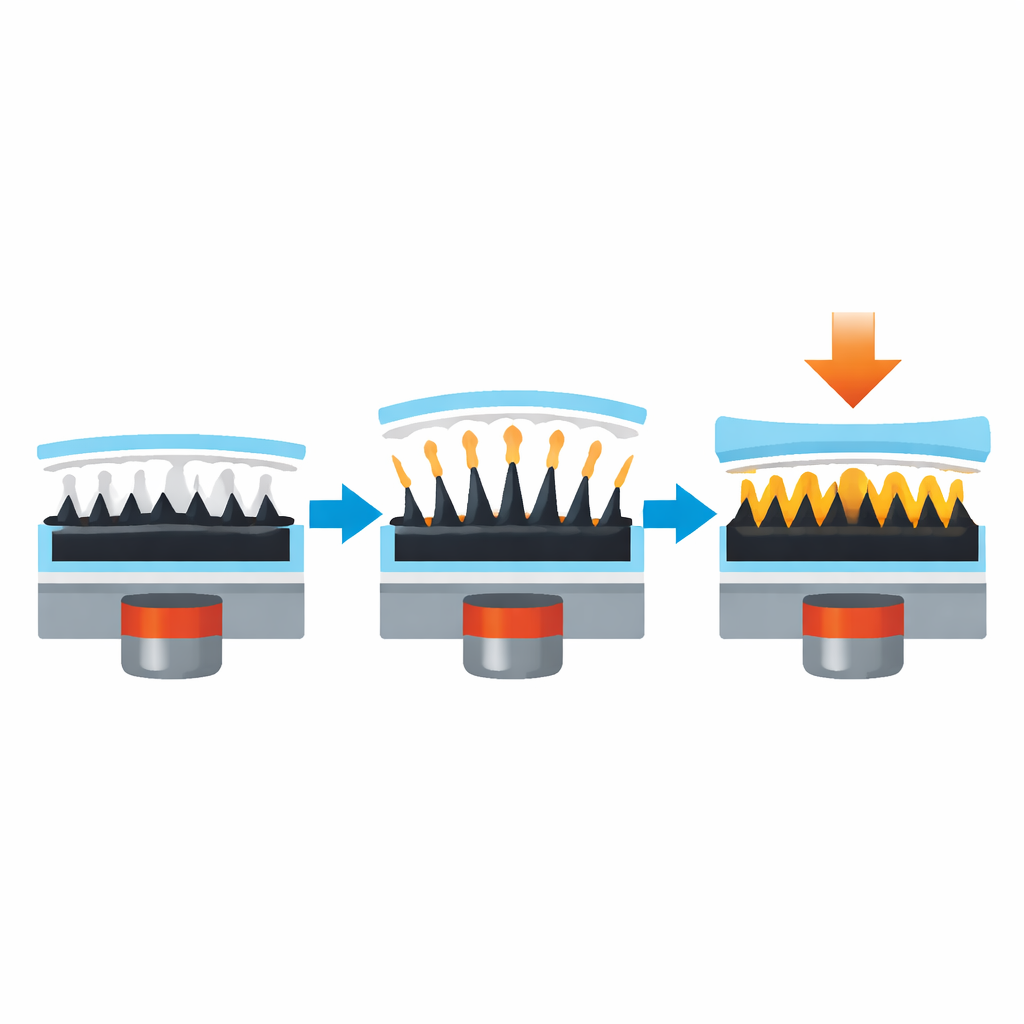
Helping robots steer clear of danger
To show how this dual sensing could work in the real world, the researchers mounted the DM-TS on an unmanned ground vehicle and connected it to a simple threshold-detection circuit and motor controller. As the vehicle passed near a strong magnet, the sensor output grew until it crossed a preset limit, triggering the controller to reverse the motors and guide the robot away from the magnetic "hot spot." When the robot bumped into an obstacle, the much larger and sharper pressure signal activated a separate threshold, causing the vehicle to retreat and avoid further impact. Even when magnetic and collision signals overlapped, their combined strength still drove a protective response, demonstrating that precise separation of the two was less important than reliably triggering avoidance behavior.
What this means for future machines
In plain terms, the authors have built a soft, self-powered patch that lets a robot both feel when it is pressing on something and sense an invisible magnetic hazard nearby, using the same tiny device. By carefully choosing liquids that respond to magnets and pressure and pairing them with a patterned rubber surface, they match or surpass the performance of many powered sensors while staying thin, flexible, and easy to integrate. As these designs are improved for harsher environments and longer lifetimes, similar dual-mode triboelectric sensors could become standard "skin" for robots and wearable systems, helping them move more safely and intelligently through complex, unseen hazards.
Citation: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Keywords: triboelectric sensor, ferrofluid, magnetic field sensing, pressure sensing, intelligent robots