Clear Sky Science · pt
Deformação induzida por magnetismo impulsionando sensor triboelétrico com percepção de modo duplo para campo magnético e pressão de contato
Toque inteligente e "sexto sentido" para robôs
À medida que robôs avançam para estações de energia, hospitais, fábricas e zonas de desastre, eles precisam evitar dois perigos ocultos: campos magnéticos intensos que podem atrapalhar sua eletrônica e colisões que podem danificar tanto o robô quanto o ambiente. Este artigo apresenta um novo sensor macio que fornece aos robôs uma espécie de "sexto sentido" duplo — ele consegue detectar campos magnéticos invisíveis sem contato e pressão física ao colidir com algo, tudo isso gerando sua própria eletricidade a partir do movimento.
Por que combinar dois sentidos importa
Muitos robôs modernos já usam dispositivos separados para medir campos magnéticos e pressão, mas eles costumam ser volumosos, exigir alimentação por fio ou ter dificuldades em espaços confinados. Sensores de modo duplo existentes tendem a depender de eletrônica tradicional que precisa de energia externa e circuitos fechados, o que os torna menos adequados para sistemas compactos, sem fio ou móveis. Os autores argumentam que um único sensor flexível e autoalimentado, capaz de detectar tanto riscos magnéticos próximos quanto contato físico, melhoraria a segurança, reduziria fiação e complexidade, e atenderia melhor às necessidades de máquinas autônomas de próxima geração.
Um sensor macio feito de líquidos e borracha
A equipe projetou um sensor triboelétrico de modo duplo, ou DM-TS, que se baseia no mesmo efeito básico que faz um balão aderir ao seu cabelo após esfregar — eletrificação por contato. O dispositivo coloca duas substâncias líquidas especiais dentro de uma estrutura de borracha de silicone elástica. A cavidade inferior contém um líquido magnético chamado ferrofluido, enquanto a cavidade superior abriga uma liga de metal líquido que serve como eletrodo. Entre elas há uma camada de silicone padronizada com pequenas estruturas pontiagudas. Quando a borracha com espinhos e o ferrofluido entram em contato e se separam, cargas elétricas se acumulam e são captadas pelo metal líquido. Como os materiais são macios, o sensor pode dobrar, esticar e se ajustar a superfícies curvas de robôs com boa biocompatibilidade. 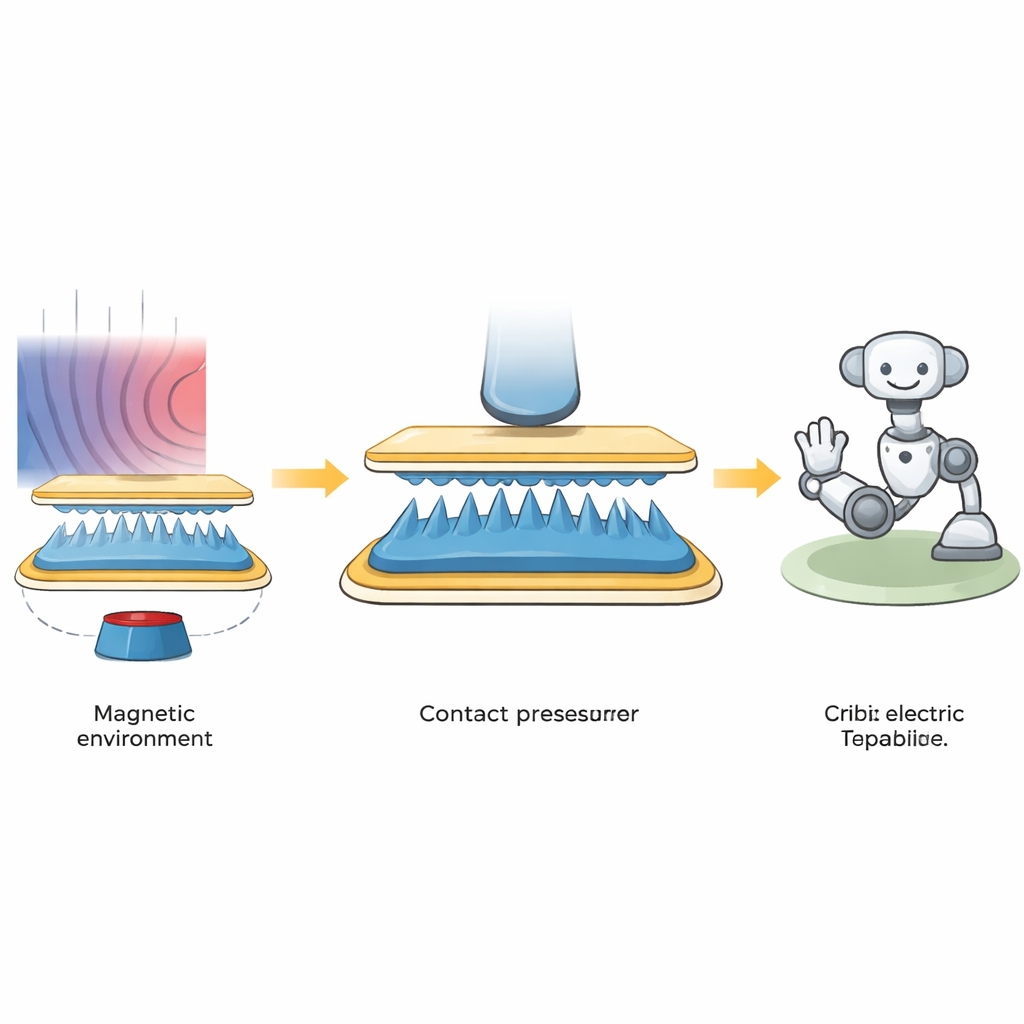
Sentindo campos magnéticos invisíveis sem tocar
Para detectar campos magnéticos, o sensor não precisa tocar nada. Quando um ímã se aproxima por baixo, o ferrofluido se reorganiza ao longo das linhas do campo, erguendo-se de um reservatório plano para uma matriz de picos agudos que se encaixam com os espinhos de silicone acima. Isso aumenta muito a área de contato entre as duas superfícies e reforça o sinal elétrico gerado. Ao aproximar e afastar um ímã permanente, os pesquisadores mostraram que a tensão de saída cresce com a intensidade do campo magnético e se mantém linear em uma faixa útil, alcançando sensibilidade semelhante à de chips comerciais de efeito Hall — mas sem precisar de corrente de polarização ou energia externa. O dispositivo também pode captar movimento lateral do ímã, com sinais mais complexos que codificam velocidade e distância, o que poderia ajudar robôs a mapear a rapidez com que estão entrando ou saindo de zonas perigosas.
Detectando toques suaves e empurrões mais fortes
Quando usado como sensor de pressão, o DM-TS responde a forças aplicadas de cima. À medida que uma carga pressiona a superfície superior, os espinhos de silicone flexíveis são empurrados para baixo no ferrofluido, alterando a área de contato. Essa deformação induzida pela pressão produz pulsos de tensão cuja amplitude aumenta com a força. Curiosamente, o sensor torna-se mais sensível em pressões maiores, ao contrário de muitos sensores de pressão padrão. Os autores atribuíram esse comportamento a dois modos diferentes de deformação e ao modo como o ferrofluido se compacta sob pressão: em cargas baixas, a maior parte da mudança resulta da remodelação do eletrodo de metal líquido, enquanto em cargas mais altas os espinhos se engajam totalmente com o ferrofluido, e suas partículas se aglomeram, formando uma rede mais sólida que melhora a transferência de carga. Na faixa mais alta testada, o sensor alcança sensibilidade de pressão muito elevada, limitada principalmente pela necessidade de evitar espremer o líquido para fora das cavidades seladas. 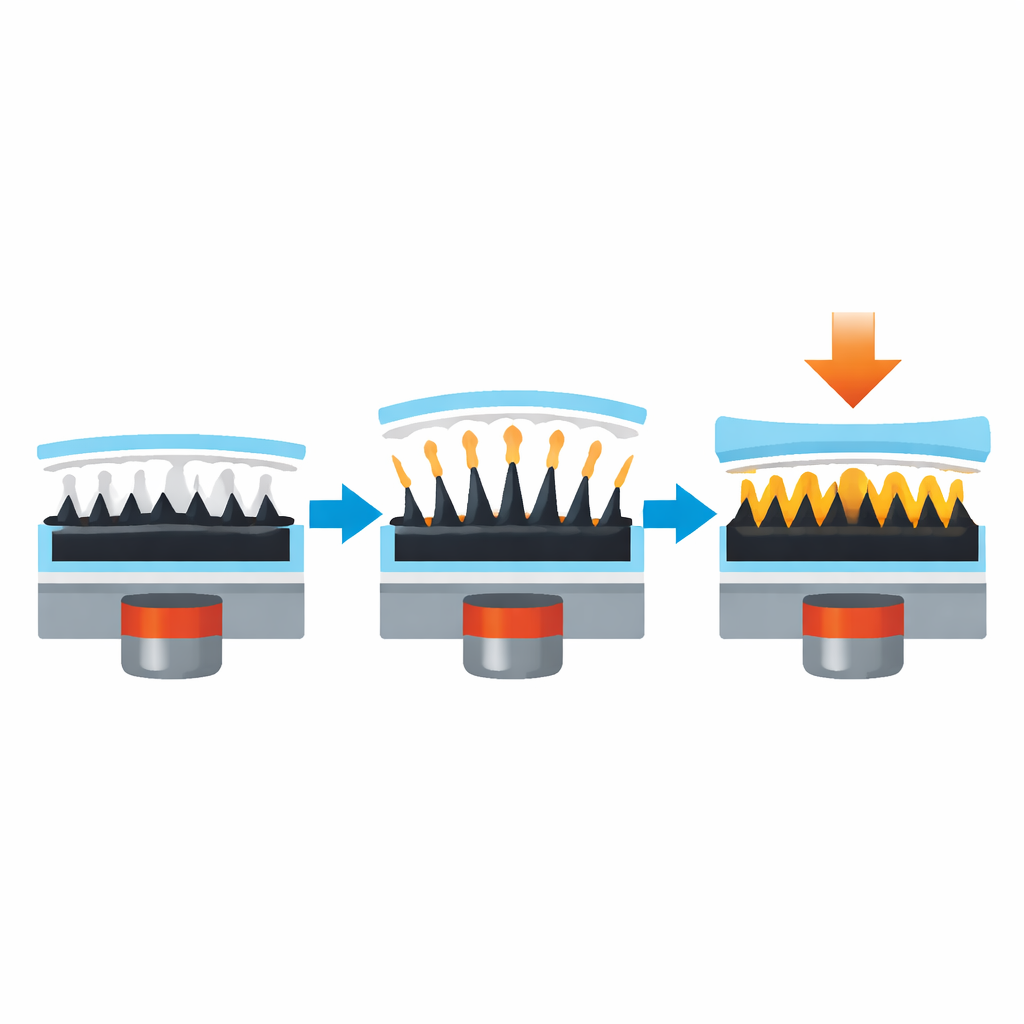
Ajudando robôs a evitarem perigos
Para demonstrar como essa detecção dupla poderia funcionar no mundo real, os pesquisadores montaram o DM-TS em um veículo terrestre não tripulado e o conectaram a um circuito simples de detecção por limiar e a um controlador de motor. À medida que o veículo passava próximo a um ímã forte, a saída do sensor aumentava até ultrapassar um limite predefinido, acionando o controlador para inverter os motores e guiar o robô para longe do "ponto quente" magnético. Quando o robô colidia com um obstáculo, o sinal de pressão, muito maior e mais abrupto, ativava um limiar separado, fazendo o veículo recuar para evitar mais impacto. Mesmo quando sinais magnéticos e de colisão se sobrepunham, sua força combinada ainda gerava uma resposta protetora, demonstrando que a separação precisa dos dois sinais era menos importante do que acionar de forma confiável um comportamento de evasão.
O que isso significa para máquinas futuras
Em termos práticos, os autores construíram um patch macio e autoalimentado que permite a um robô tanto sentir quando está pressionando algo quanto detectar um risco magnético invisível nas proximidades, usando o mesmo dispositivo minúsculo. Ao escolher cuidadosamente líquidos que respondem a campos magnéticos e pressão e combiná-los com uma superfície de borracha padronizada, eles igualam ou superam o desempenho de muitos sensores alimentados, mantendo o conjunto fino, flexível e fácil de integrar. Conforme esses projetos são aprimorados para ambientes mais severos e maior durabilidade, sensores triboelétricos de modo duplo semelhantes podem se tornar uma "pele" padrão para robôs e sistemas vestíveis, ajudando-os a se mover com mais segurança e inteligência por entre perigos complexos e invisíveis.
Citação: Zhang, T., Wang, S., Qin, S. et al. Magnetic-induced deformation driving triboelectric sensor with dual-mode perception for magnetic field and contacting pressure. Microsyst Nanoeng 12, 156 (2026). https://doi.org/10.1038/s41378-026-01285-2
Palavras-chave: sensor triboelétrico, ferrofluido, detecção de campo magnético, detecção de pressão, robôs inteligentes