Clear Sky Science · zh
多通道软微流体力传感器:设计、表征及其在腹腔镜手术中的应用
为什么通过手术器械“感觉”很重要
当外科医生通过细小的钥匙孔切口进行操作时,他们的手与患者组织之间被长而刚性的器械隔开。大量自然的“触觉”丧失了,使得判断抓持或挤压脆弱器官的力度变得更加困难。本文介绍了一类新的软性、充液传感器,可直接构建在腹腔镜器械上,旨在在不增加笨重硬件或复杂电子设备的情况下,将可靠的触觉重新赋予外科医生。 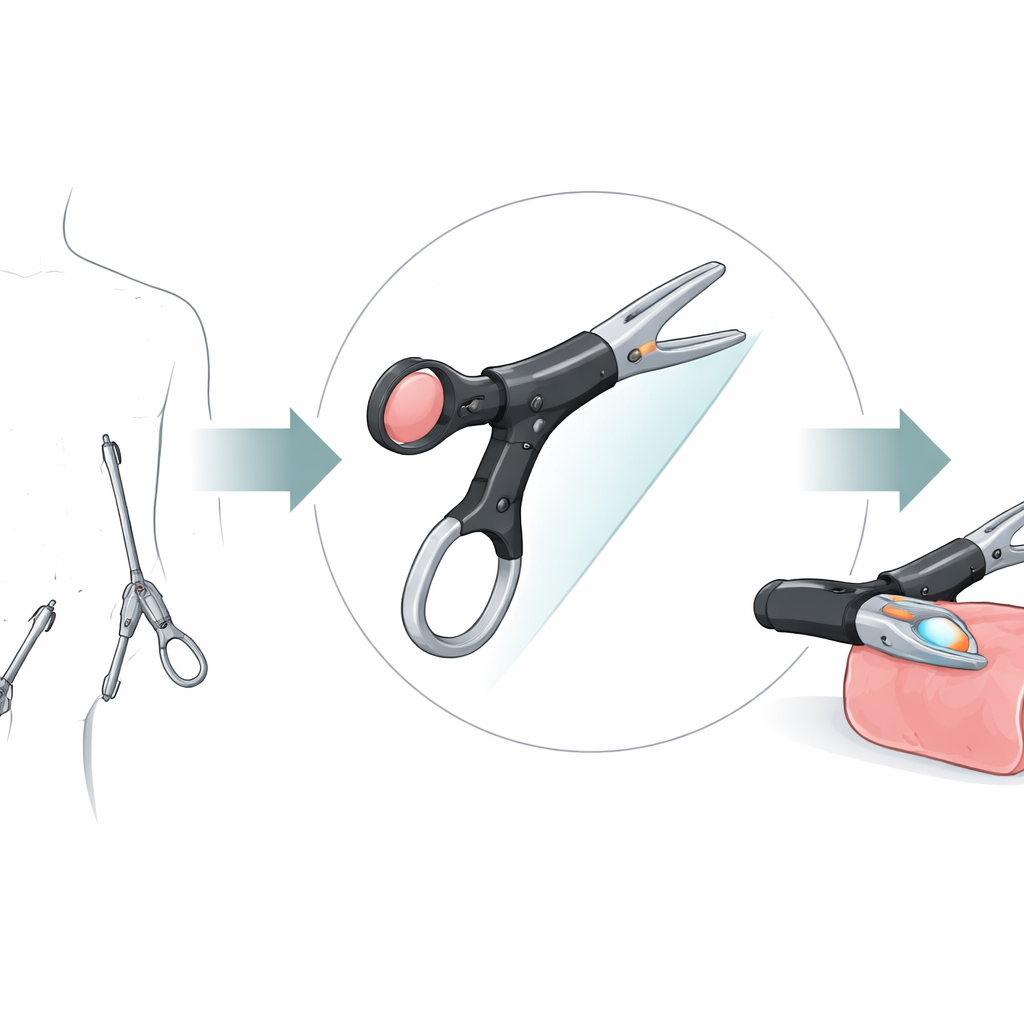
像人工皮肤一样工作的软性传感器
这些传感器由弹性硅胶(PDMS)制成,内部封闭有细如发丝的通道,通道内充有液态金属合金。传感器受压时,柔软的硅胶变形并挤压通道,使其横截面积变窄。由于金属通路变得更窄且更长,其电阻以可预测的方式增加。通过测量这种变化,设备将物理力转换为电信号。作者表明,这些传感器在弯曲、拉伸和扭转时仍能工作良好,使其非常适合用于曲面和运动表面,例如手术器械、软体机器人或可穿戴设备。
调节灵敏度的设计选择
为超越简单演示,研究团队系统地探索了设计细节如何影响性能。通过计算机仿真和台式测试,他们改变了硅胶的刚度、传感器的整体厚度、通道距表面的深度以及通道的形状和尺寸。更软的硅胶、更薄的器件和更浅的通道都会提高传感器的响应性,因为在相同载荷下它们允许更多的变形。更窄的通道也放大了效应,将应变集中在更小的流体通路中。在几种横截面形状中,“倒置阶梯三角形”通道——顶部较宽、下面分阶变窄——表现出最高的灵敏度,因为其几何形状将挤压集中在最能显著改变电阻的区域。
多通道实现更广泛的触觉感知
基于这些见解,研究人员制造了具有多个内部通道的传感器,以在同一紧凑器件中覆盖轻触和重触。在一个版本中,两个螺旋通道位于不同深度:浅层通道对小力反应强烈,而深层通道在较高载荷下保持线性。在单层设计中,“花瓣状”和“应变计式”布局将两个通道并列放置,具有不同的宽度或横截面。其中一个通道较扁、易变形,对轻柔接触具有高灵敏度,而另一个通道在力增大时仍能保持精度。 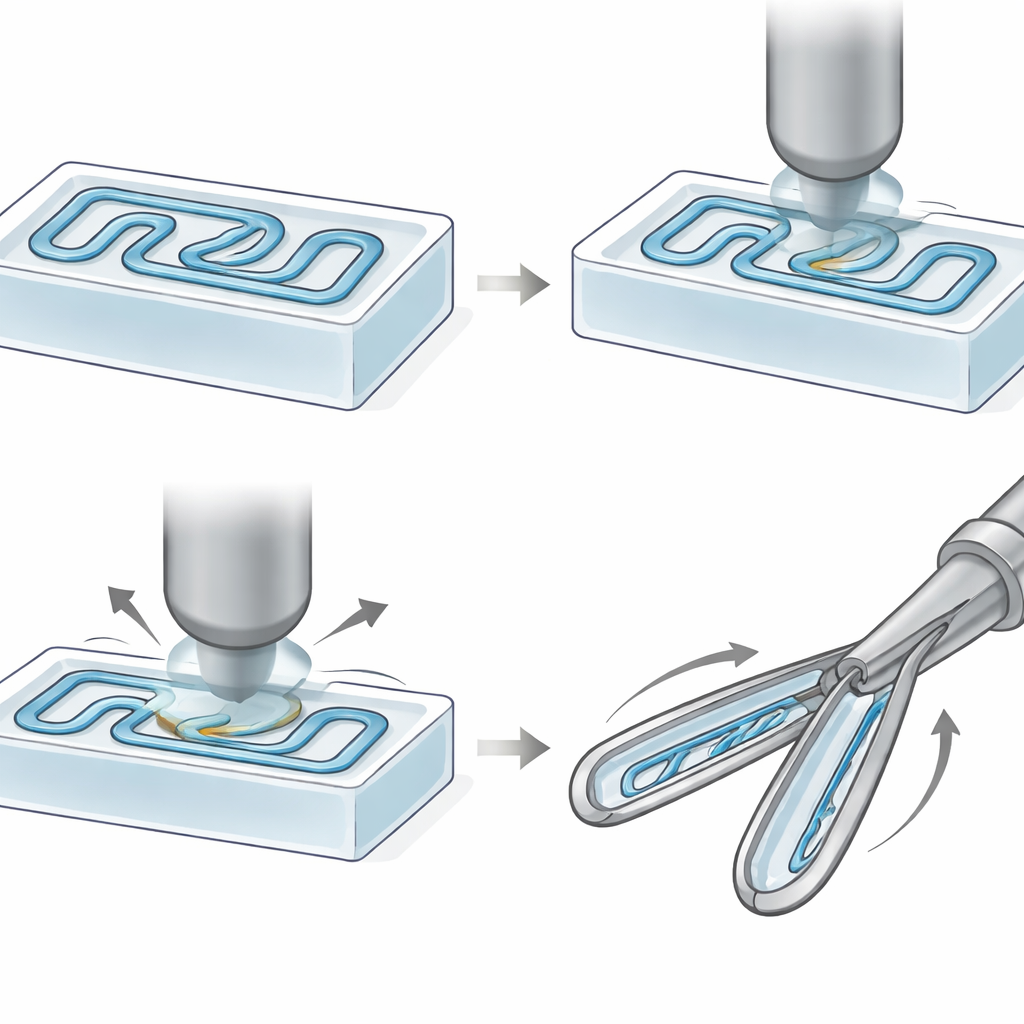
将触觉带回腹腔镜器械
为展示实用性,团队将两种软性传感器安装到标准腹腔镜抓持器上。一个在一侧颌部带齿纹的传感器直接测量施加于类组织硅胶样本的力,而安装在手柄拇指环处的螺旋传感器则记录外科医生按压以闭合颌部时的力度。由于这些传感器由与许多组织模型相同类型的软硅胶制成,它们比裸露金属接触表面更温和并且更能贴合曲面。测试显示在反复抓取和释放循环中信号可重复,并证实软性颌部在模型组织上产生的应力远低于刚性金属抓持器。两种传感器共同可实时提供关于手部动作与器械-组织相互作用的丰富信息。
这对未来外科触觉意味着什么
简而言之,这项工作表明可以在外科器械中集成微小的充液“神经”来感知其挤压力度。由于这些器件柔软、成本低且可使用常见的3D打印与模具制造方法制得,它们可以针对不同器械、力范围甚至一次性使用进行定制。作者得出结论:这些多通道微流体传感器是朝向更智能器械的现实路径,可在微创手术中恢复触觉反馈,并且也可被改造用于软体机器人和人机界面等需要安全、温和触觉的场景。
引用: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
关键词: 软微流体力传感器, 腹腔镜抓持器, 液态金属微通道, 触觉反馈, 微创手术