Clear Sky Science · en
Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy
Why Feeling Through Surgical Tools Matters
When a surgeon operates through tiny keyhole incisions, their hands are separated from the patient’s tissues by long, rigid instruments. Much of the natural sense of “feel” is lost, making it harder to judge how firmly they are grasping or squeezing delicate organs. This paper introduces a new class of soft, fluid-filled sensors that can be built directly onto laparoscopic tools, with the goal of giving surgeons back a reliable sense of touch—without adding bulky hardware or complex electronics. 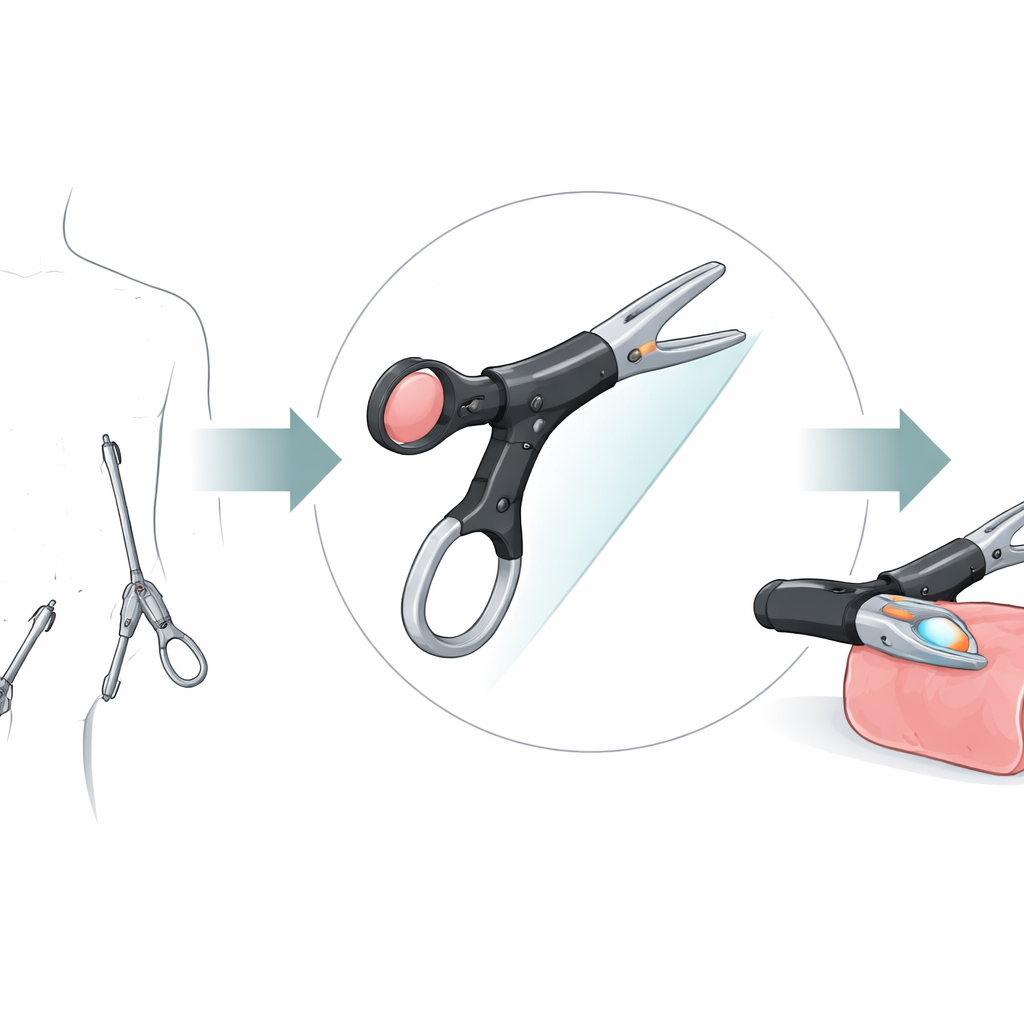
Soft Sensors That Behave Like Artificial Skin
The sensors are made from a rubbery silicone (PDMS) that encloses hair‑thin channels filled with a liquid metal alloy. When the sensor is pressed, the soft silicone deforms and squeezes the channels, narrowing their cross‑section. Because the metal path becomes tighter and longer, its electrical resistance increases in a predictable way. By measuring that change, the device converts physical force into an electrical signal. The authors show that these sensors can bend, stretch, and twist while still working, making them well suited for curved and moving surfaces such as surgical tools, soft robots, or wearable devices.
Design Choices That Tune Sensitivity
To move beyond simple demonstrations, the team systematically explored how design details affect performance. Using computer simulations and bench‑top tests, they varied the stiffness of the silicone, the overall sensor thickness, the depth of the channel below the surface, and the channel’s shape and size. Softer silicone, thinner devices, and shallower channels all made the sensor more responsive because they allowed more deformation for the same applied load. Narrower channels also amplified the effect, concentrating strain into a smaller fluid path. Among several cross‑section shapes, an “inverted stepped triangle” channel—wide at the top and narrower in steps below—gave the highest sensitivity, because its geometry focuses the squeeze into regions that most strongly alter electrical resistance.
Many Channels for a Wider Sense of Touch
Building on these insights, the researchers created sensors with more than one internal channel to cover both light and strong touch in the same compact device. In one version, two spiral channels sit at different depths: the shallow one reacts strongly to small forces, while the deeper one stays linear at higher loads. In single‑layer designs, “flower‑like” and “strain gauge‑like” layouts place two channels side by side with different widths or cross‑sections. One channel is flatter and more easily deformed, providing high sensitivity to gentle contact, while the other maintains accuracy when forces grow larger. 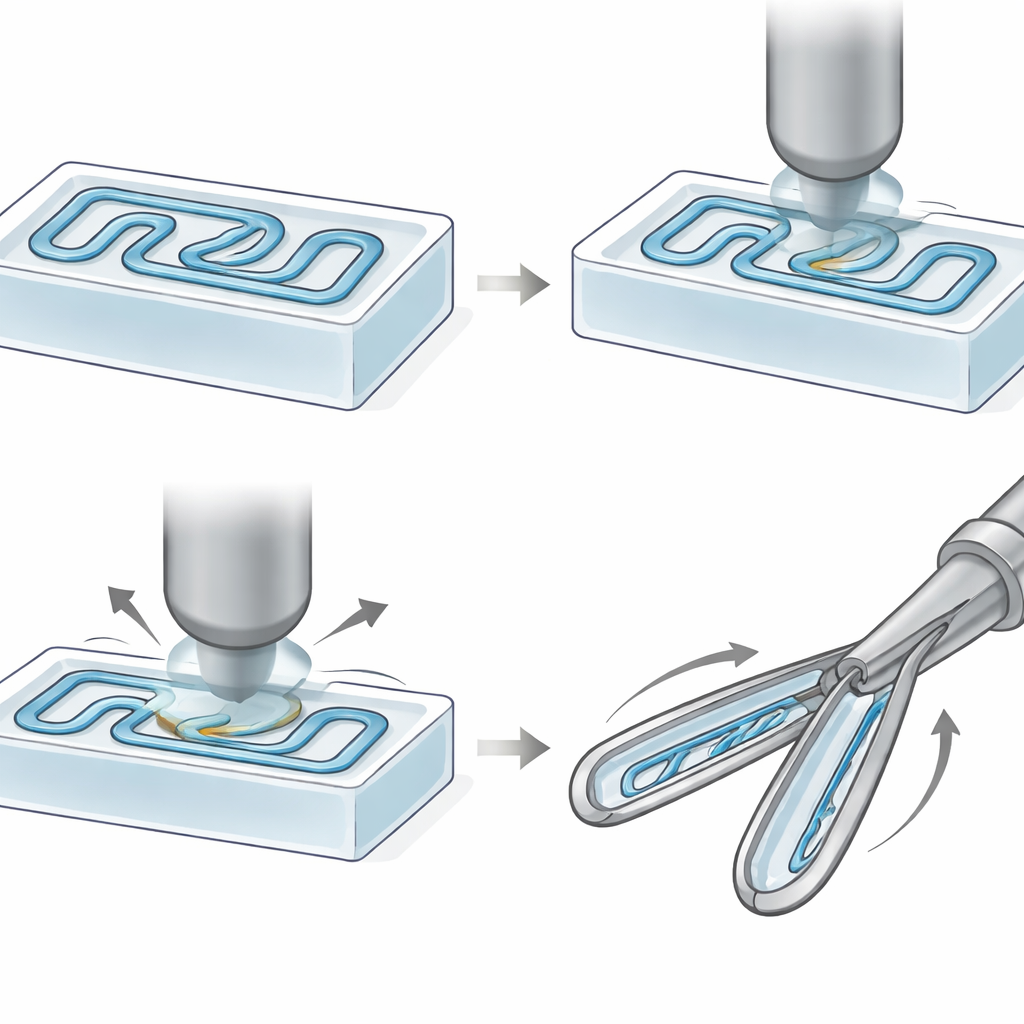
Bringing Touch Back to Laparoscopic Tools
To demonstrate practical use, the team mounted two soft sensors onto a standard laparoscopic grasper. A teeth‑patterned sensor on one jaw directly measured the force applied to tissue‑like silicone samples, while a spiral sensor on the thumb ring of the handle captured how hard the surgeon pressed to close the jaws. Because the sensors are made of the same kind of soft silicone as many tissue phantoms, they contact surfaces more gently than bare metal and conform well to curves. Tests showed repeatable signals during repeated grasp‑and‑release cycles and confirmed that the soft jaws generate much lower stress on the model tissue than a rigid metal grasper would. Together, the two sensors can provide a rich view of both the hand’s action and the tool‑tissue interaction in real time.
What This Means for Future Surgical Touch
In simple terms, this work shows that tiny, fluid‑filled “nerves” can be built into surgical tools to sense how hard they are squeezing. Because the devices are soft, inexpensive, and made using common 3D printing and molding methods, they can be tailored for different tools, force ranges, and even disposable use. The authors conclude that these multichannel microfluidic sensors are a realistic path toward smarter instruments that restore tactile feedback in minimally invasive surgery and can also be adapted for soft robots and human–machine interfaces where safe, gentle touch is essential.
Citation: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Keywords: soft microfluidic force sensor, laparoscopic grasper, liquid metal microchannel, tactile feedback, minimally invasive surgery