Clear Sky Science · pl
Wielokanałowe miękkie mikropłynne czujniki siły: projekt, charakterystyka i zastosowanie w laparoskopii
Dlaczego odczuwanie przez narzędzia chirurgiczne ma znaczenie
Gdy chirurg operuje przez drobne nacięcia typu keyhole, jego ręce są oddzielone od tkanek pacjenta długimi, sztywnymi narzędziami. Większość naturalnego zmysłu „czucia” zostaje utracona, co utrudnia ocenę, jak mocno chwytają lub ściskają delikatne narządy. W artykule przedstawiono nową klasę miękkich, wypełnionych cieczą czujników, które można zintegrować bezpośrednio z narzędziami laparoskopowymi, z celem przywrócenia chirurgom wiarygodnego zmysłu dotyku — bez dodawania masywnego osprzętu czy złożonej elektroniki. 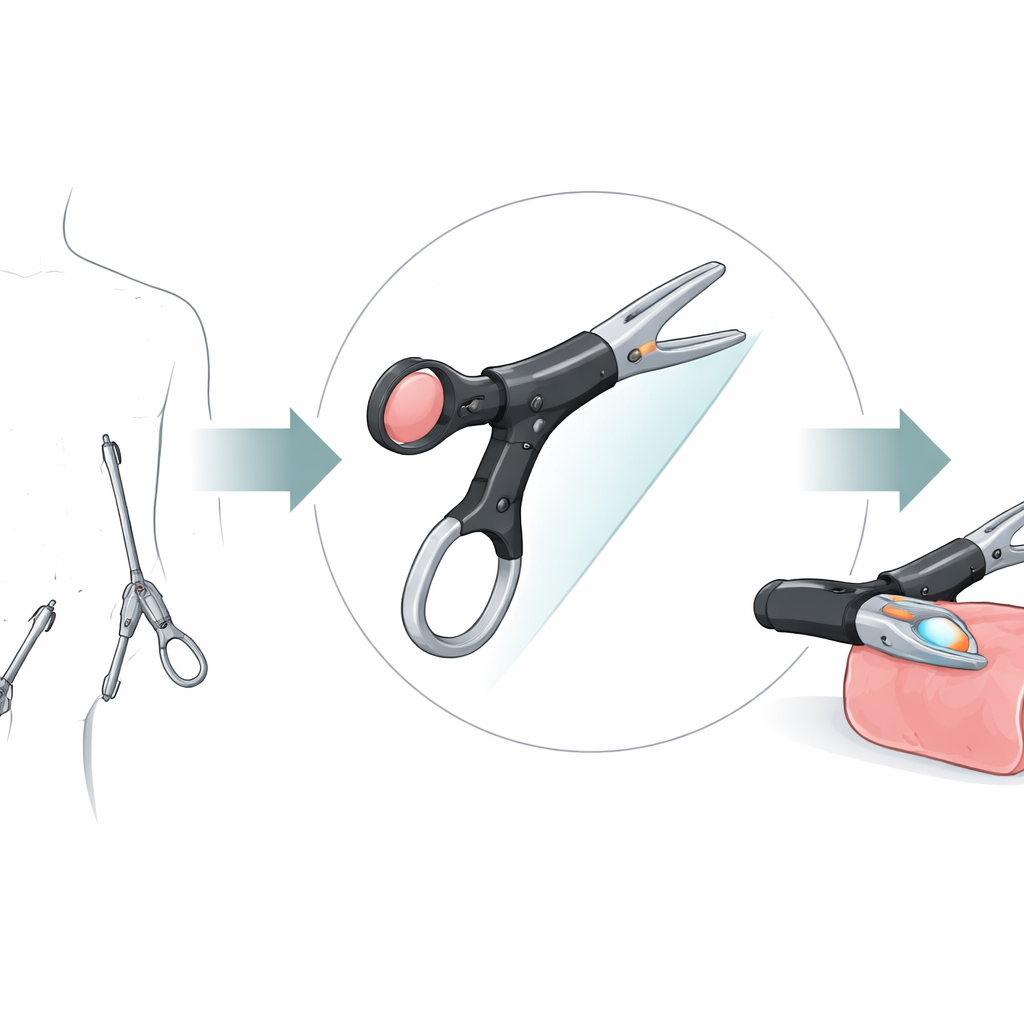
Miękkie czujniki zachowujące się jak sztuczna skóra
Czujniki wykonano z gumowatego silikonu (PDMS), który otacza włosowato cienkie kanały wypełnione stopem ciekłego metalu. Gdy czujnik jest naciskany, miękki silikon odkształca się i ściska kanały, zmniejszając ich przekrój. Ponieważ ścieżka metalu staje się węższa i dłuższa, jego opór elektryczny rośnie w przewidywalny sposób. Mierząc tę zmianę, urządzenie przekształca siłę fizyczną w sygnał elektryczny. Autorzy pokazują, że czujniki te mogą się wyginać, rozciągać i skręcać, zachowując funkcjonalność, co czyni je dobrze przystosowanymi do powierzchni zakrzywionych i ruchomych, takich jak narzędzia chirurgiczne, miękkie roboty czy urządzenia noszone na ciele.
Wybory projektowe strojące czułość
Aby wyjść poza proste demonstracje, zespół systematycznie badał, jak szczegóły konstrukcji wpływają na wydajność. Korzystając z symulacji komputerowych i testów stołowych, zmieniali sztywność silikonu, ogólną grubość czujnika, głębokość kanału pod powierzchnią oraz kształt i rozmiar kanału. Miększy silikon, cieńsze urządzenia i płytsze kanały sprawiały, że czujnik był bardziej czuły, ponieważ pozwalały na większe odkształcenie przy tej samej przyłożonej sile. Węższe kanały także wzmacniały efekt, koncentrując odkształcenie w mniejszej ścieżce płynu. Spośród kilku kształtów przekroju kanału, „odwrócony schodkowy trójkąt” — szeroki u góry i węższy w stopniach poniżej — dawał największą czułość, ponieważ jego geometria skupia ściskanie w obszarach, które najsilniej zmieniają opór elektryczny.
Wiele kanałów dla szerszego zmysłu dotyku
Wykorzystując te ustalenia, badacze stworzyli czujniki z więcej niż jednym wewnętrznym kanałem, aby jednocześnie rejestrować delikatne i silne dotknięcia w tym samym kompaktowym urządzeniu. W jednej wersji dwa spiralne kanały znajdują się na różnych głębokościach: płytki reaguje silnie na małe siły, podczas gdy głębszy pozostaje liniowy przy większych obciążeniach. W projektach jednowarstwowych układy „kwiatowe” i „podobne do tensometru” umieszczają dwa kanały obok siebie o różnych szerokościach lub przekrojach. Jeden kanał jest spłaszczony i łatwiej się odkształca, zapewniając wysoką czułość na delikatny kontakt, podczas gdy drugi zachowuje dokładność w miarę wzrostu sił. 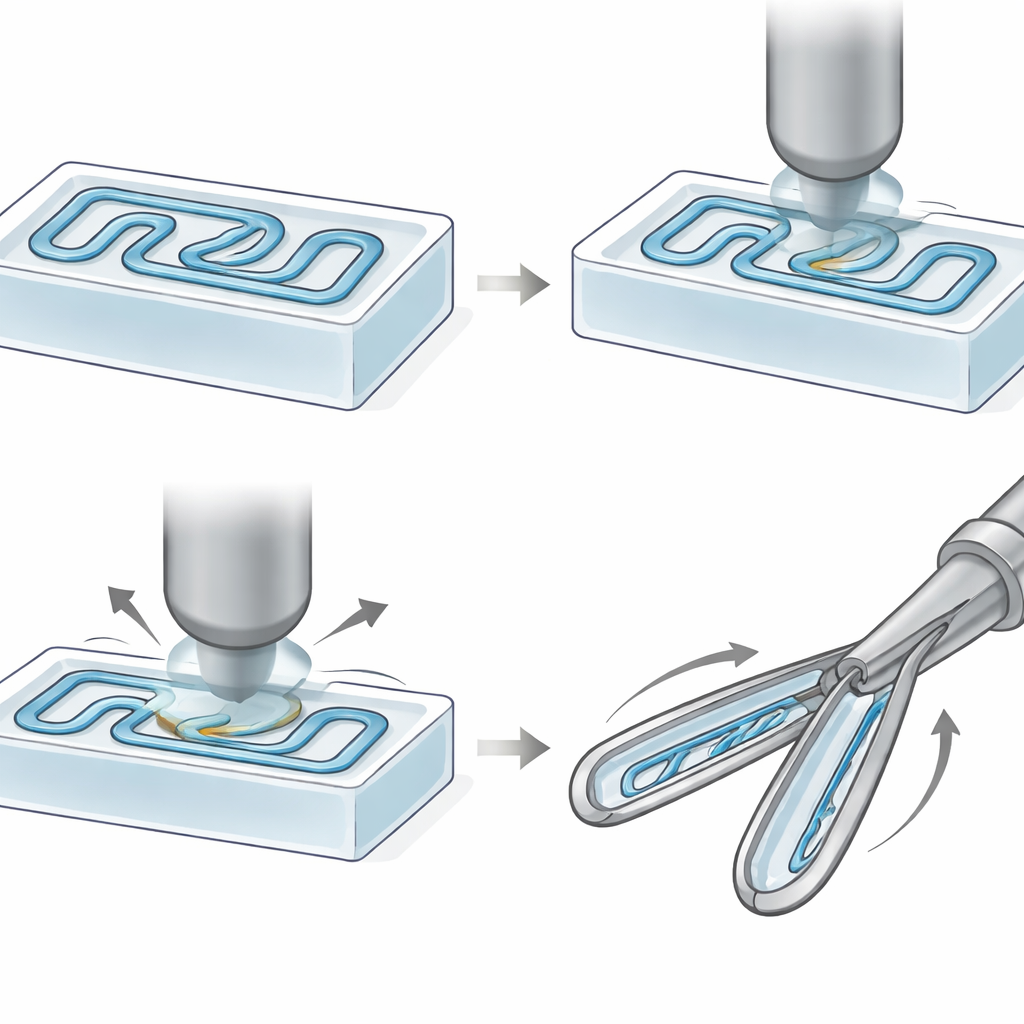
Przywracanie dotyku narzędziom laparoskopowym
Aby zademonstrować użyteczność praktyczną, zespół zamontował dwa miękkie czujniki na standardowych szczypcach laparoskopowych. Czujnik o wzorze zębów na jednej szczęce mierzył bezpośrednio siłę przykładane do próbek silikonowych imitujących tkankę, podczas gdy spiralny czujnik na pierścieniu kciuka uchwytu rejestrował, jak mocno chirurg naciska, aby zamknąć szczęki. Ponieważ czujniki wykonano z tego samego rodzaju miękkiego silikonu co wiele fantomów tkankowych, stykają się z powierzchniami łagodniej niż goły metal i dobrze dopasowują się do krzywizn. Testy wykazały powtarzalne sygnały podczas kolejnych cykli chwytania i zwalniania oraz potwierdziły, że miękkie szczęki generują znacznie niższe naprężenia na modelu tkanki niż sztywne metalowe szczypce. Razem oba czujniki mogą dostarczać bogaty obraz zarówno działania ręki, jak i interakcji narzędzie–tkanka w czasie rzeczywistym.
Co to oznacza dla przyszłości chirurgicznego dotyku
Mówiąc prościej, praca pokazuje, że maleńkie, wypełnione płynem „nerwy” można wbudować w narzędzia chirurgiczne, aby wyczuwać, jak mocno ściskają. Ponieważ urządzenia są miękkie, tanie i wykonane z powszechnie stosowanych metod druku 3D i formowania, można je dostosować do różnych narzędzi, zakresów sił, a nawet zastosowań jednorazowych. Autorzy dochodzą do wniosku, że te wielokanałowe mikropłynne czujniki to realistyczna droga do bardziej inteligentnych narzędzi przywracających sprzężenie dotykowe w chirurgii małoinwazyjnej, które można także zaadaptować dla miękkich robotów i interfejsów człowiek–maszyna, gdzie bezpieczny, delikatny dotyk jest istotny.
Cytowanie: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Słowa kluczowe: miękki mikropłynny czujnik siły, szczypce laparoskopowe, mikrokanalik z ciekłym metalem, sprzężenie dotykowe, chirurgia małoinwazyjna