Clear Sky Science · ru
Мультиканальные мягкие микрофлюидные датчики силы: конструкция, характеристика и применение в лапароскопии
Почему ощущение через хирургические инструменты важно
Когда хирург работает через крошечные «ключевые» разрезы, его руки отделены от тканей пациента длинными жесткими инструментами. Большая часть естественного чувства «осязания» теряется, и становится труднее оценивать, с какой силой они хватают или сжимают деликатные органы. В этой статье представлен новый класс мягких датчиков, заполненных жидкостью, которые можно встраивать прямо в лапароскопические инструменты с целью вернуть хирургу надежное ощущение прикосновения — без добавления громоздкой аппаратуры или сложной электроники. 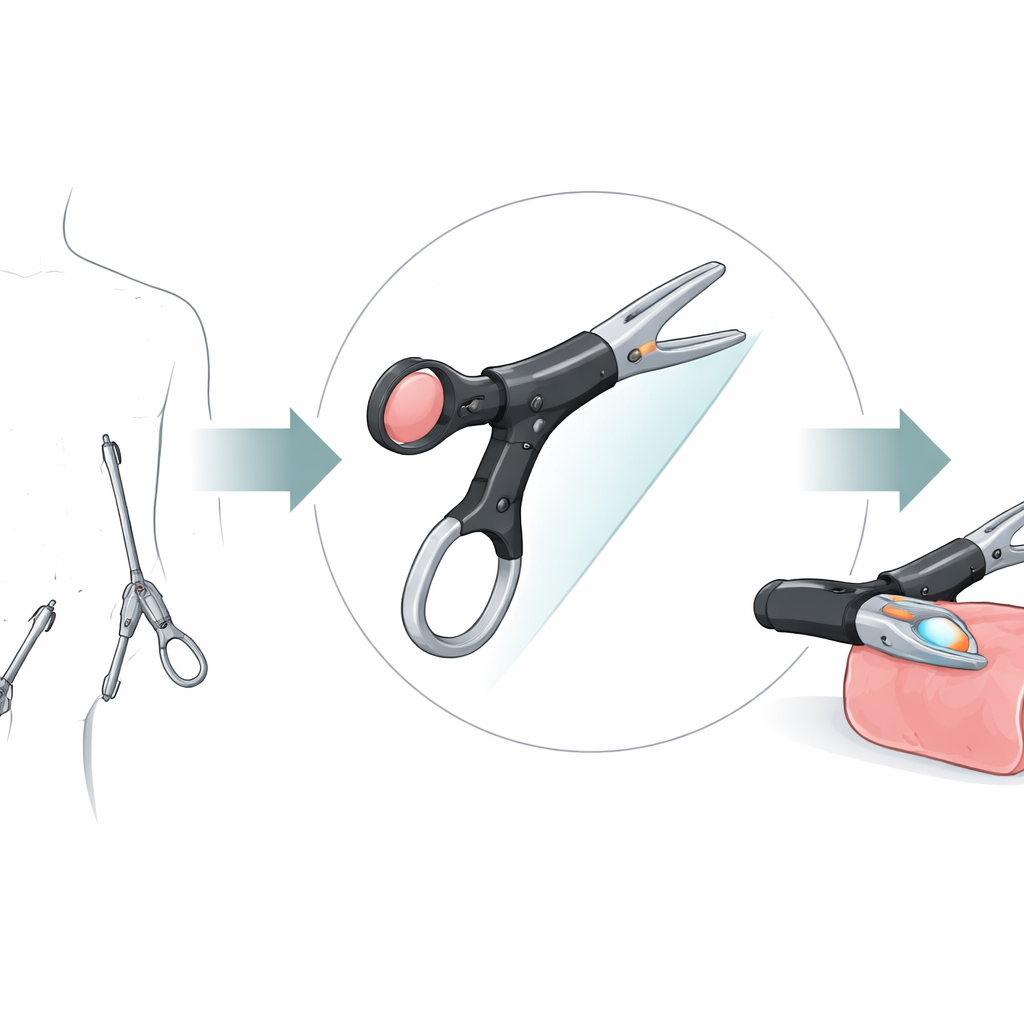
Мягкие датчики, которые ведут себя как искусственная кожа
Датчики изготовлены из эластичного силикона (PDMS), внутри которого заключены сверхтонкие каналы, заполненные сплавом жидкого металла. При нажатии мягкий силикон деформируется и сжимает каналы, уменьшая их поперечное сечение. Поскольку путь жидкого металла становится уже и длиннее, его электрическое сопротивление предсказуемо увеличивается. Измеряя это изменение, устройство преобразует физическую силу в электрический сигнал. Авторы показывают, что эти датчики могут сгибаться, растягиваться и скручиваться, сохраняя работоспособность, что делает их пригодными для изогнутых и подвижных поверхностей, таких как хирургические инструменты, мягкие роботы или носимые устройства.
Конструкторские решения, которые настраивают чувствительность
Чтобы выйти за рамки простых демонстраций, команда систематически изучила, как конструктивные детали влияют на характеристики. С помощью компьютерного моделирования и лабораторных тестов они варьировали жесткость силикона, общую толщину датчика, глубину канала под поверхностью, а также форму и размеры канала. Более мягкий силикон, более тонкие устройства и более мелкие каналы делали датчик более чувствительным, поскольку при той же нагрузке происходила большая деформация. Уже каналы также усиливали эффект, концентрируя деформацию в более узком пути для жидкости. Среди нескольких форм поперечного сечения каналов наибольшую чувствительность обеспечивал «перевернутый ступенчатый треугольник» — широкий сверху и уже ступенями внизу — потому что его геометрия фокусирует сжатие в областях, которые сильнее всего изменяют электрическое сопротивление.
Много каналов для более широкого восприятия прикосновения
Опираясь на эти идеи, исследователи создали датчики с более чем одним внутренним каналом, чтобы охватить как легкое, так и сильное прикосновение в одном компактном устройстве. В одной версии два спиральных канала расположены на разных глубинах: мелкий реагирует сильно на небольшие силы, тогда как глубокий сохраняет линейность при больших нагрузках. В однослойных конструкциях «цветочная» и «по типу тензодатчика» компоновки размещают два канала рядом с разной шириной или поперечным сечением. Один канал более плоский и легче деформируется, обеспечивая высокую чувствительность к нежным контактам, в то время как другой сохраняет точность при увеличении силы. 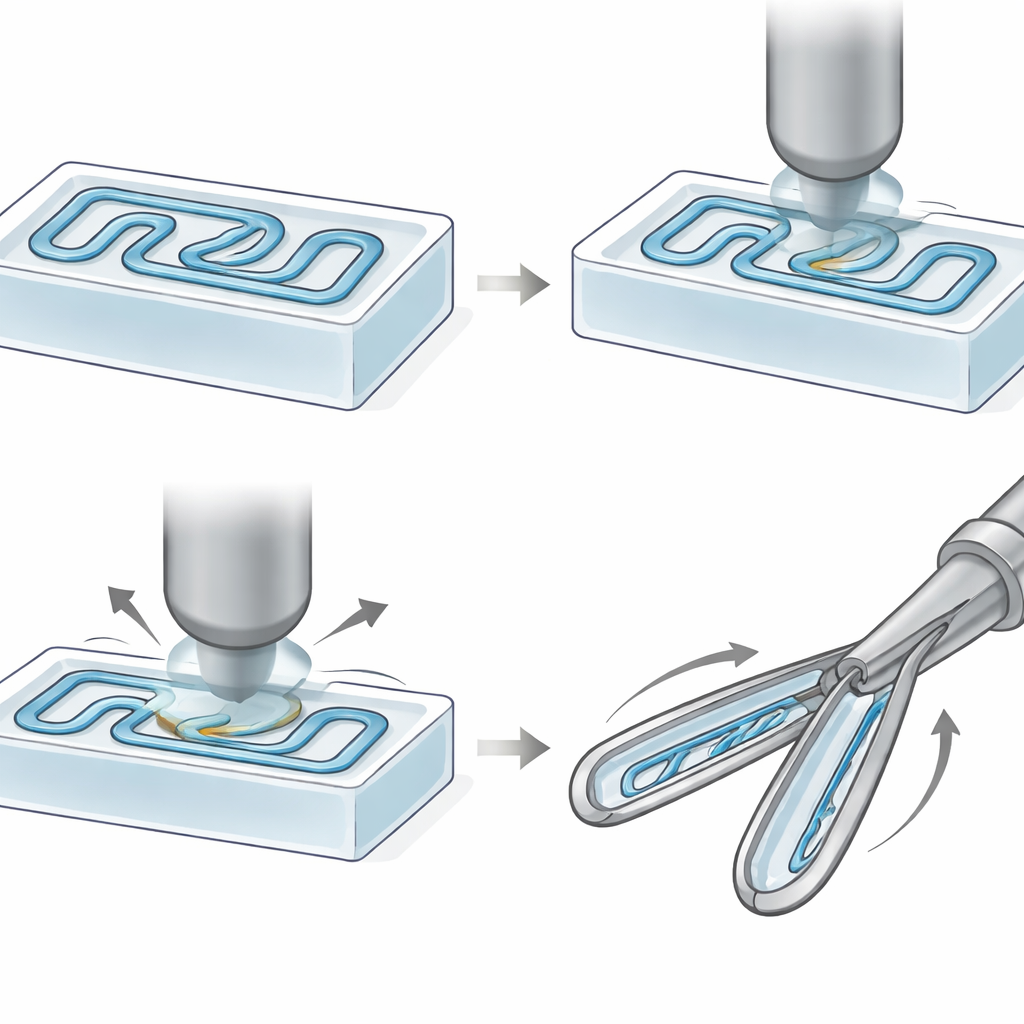
Возвращая осязание лапароскопическим инструментам
Чтобы продемонстрировать практическое применение, команда смонтировала два мягких датчика на стандартный лапароскопический захват. Датчик с зубчатым рисунком на одной челюсти напрямую измерял силу, приложенную к образцам, имитирующим ткани, тогда как спиральный датчик на кольце «большого пальца» рукояти фиксировал, с какой силой хирург нажимает, чтобы закрыть челюсти. Поскольку датчики выполнены из того же типа мягкого силикона, что и многие тканевые фантомы, они контактируют с поверхностями более бережно, чем оголенный металл, и хорошо повторяют кривизну. Испытания показали воспроизводимые сигналы при многократных циклах захвата и отпускания и подтвердили, что мягкие челюсти создают значительно меньшие напряжения в моделируемой ткани, чем жесткий металлический захват. Вместе два датчика способны в реальном времени дать полное представление как о действии руки, так и о взаимодействии инструмента с тканью.
Что это значит для будущего хирургического осязания
Проще говоря, эта работа показывает, что крошечные, заполненные жидкостью «нервы» можно встраивать в хирургические инструменты, чтобы чувствовать, с какой силой они сжимают. Поскольку устройства мягкие, недорогие и изготавливаются с использованием обычных методов 3D-печати и формования, их можно адаптировать для разных инструментов, диапазонов сил и даже одноразового использования. Авторы делают вывод, что эти мультиканальные микрофлюидные датчики являются реалистичным путем к более умным инструментам, которые восстанавливают тактильную обратную связь в минимально инвазивной хирургии, а также могут быть адаптированы для мягких роботов и человеко-машинных интерфейсов, где важен безопасный, деликатный контакт.
Цитирование: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Ключевые слова: мягкий микрофлюидный датчик силы, лапароскопический захват, микроканал с жидким металлом, тактильная обратная связь, минимально инвазивная хирургия