Clear Sky Science · tr
Çok kanallı yumuşak mikroakışkan kuvvet sensörleri: tasarım, karakterizasyon ve laparoskopide uygulama
Neden Cerrahi Aletlerle Hissetmek Önemli?
Bir cerrah küçük deliklerden operasyon yaparken, elleri hastanın dokularından uzun, sert aletlerle ayrılır. Doğal “dokunma” hissinin büyük bölümü kaybolur; bu da hassas organları ne kadar sıkı tutup sıkıştırdıklarını değerlendirmeyi zorlaştırır. Bu makale, laparoskopik aletlerin üzerine doğrudan entegre edilebilen, yumuşak ve sıvı dolu yeni bir sensör sınıfını tanıtıyor; amaç, cerrahlara hacimli donanım veya karmaşık elektronikler eklemeden güvenilir bir dokunma hissi geri kazandırmak.
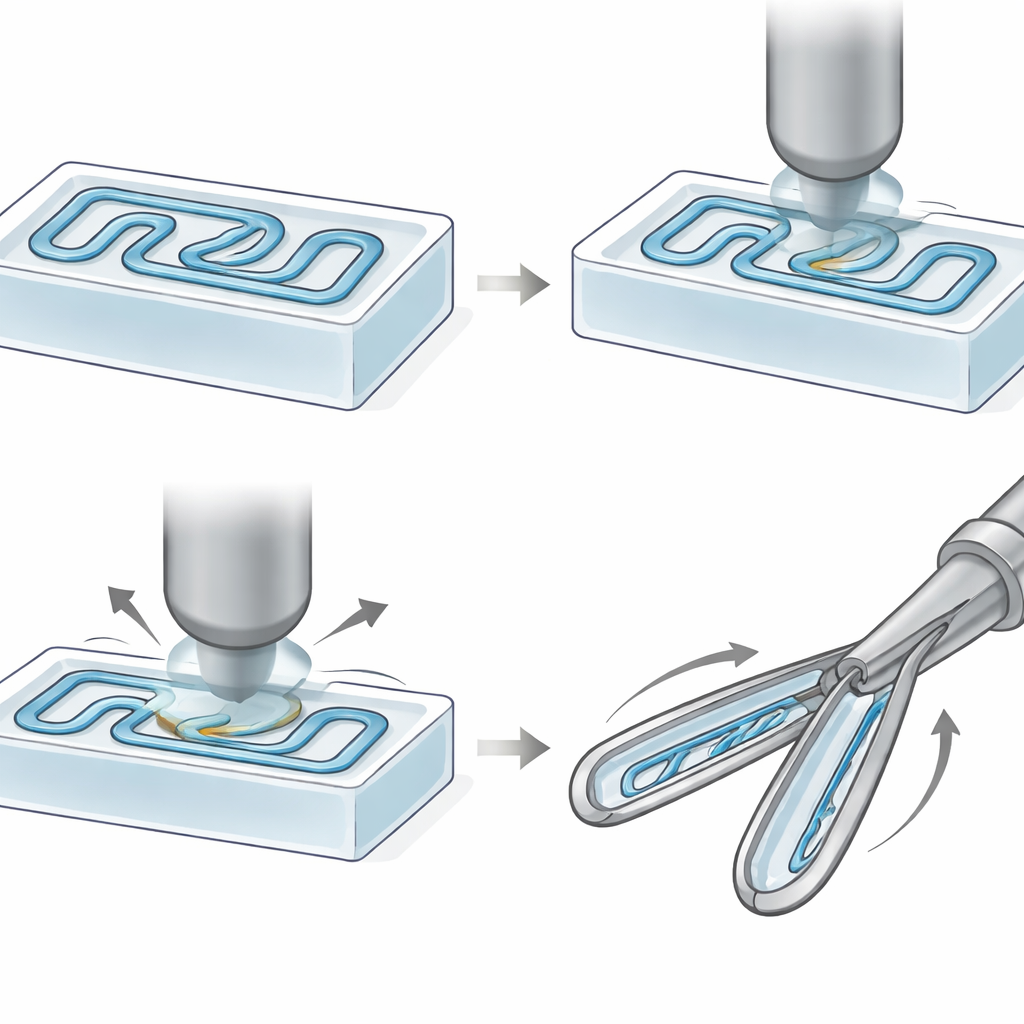
Yapay Deri Gibi Davranan Yumuşak Sensörler
Sensörler, sıvı metal alaşımla dolu, tel inceliğinde kanalları çevreleyen kauçuksu bir silikon (PDMS) malzemeden yapılmıştır. Sensör bastırıldığında, yumuşak silikon şekil değiştirir ve kanalları sıkıştırarak kesitlerini daraltır. Metal yol daralıp uzadıkça elektriksel direnci öngörülebilir biçimde artar. Bu değişimi ölçerek cihaz fiziksel kuvveti elektriksel bir sinyale dönüştürür. Yazarlar, bu sensörlerin bükülme, gerilme ve burulma sırasında da çalışmaya devam ettiğini göstererek onları cerrahi aletler, yumuşak robotlar veya giyilebilir cihazlar gibi eğimli ve hareketli yüzeyler için uygun kılıyor.
Duyarlılığı Ayarlayan Tasarım Seçimleri
Basit gösterimlerin ötesine geçmek için ekip, tasarım detaylarının performansı nasıl etkilediğini sistematik olarak inceledi. Bilgisayar simülasyonları ve laboratuvar testleri kullanarak silikonun sertliğini, sensörün toplam kalınlığını, yüzey altındaki kanal derinliğini ve kanalın şekil ile boyutunu değiştirdiler. Daha yumuşak silikon, daha ince cihazlar ve daha sığ kanallar aynı uygulanan yük için daha fazla deformasyona izin verdiğinden sensörü daha tepkisel yaptı. Daha dar kanallar da etkiyi büyüterek gerilmeyi daha küçük bir sıvı yoluna yoğunlaştırdı. Birkaç kesit şekli arasında, üstü geniş ve altında basamaklı olarak daha daralan “ters basamaklı üçgen” kanal en yüksek duyarlılığı sağladı; çünkü geometrisi sıkıştırmayı, elektrik direncini en çok değiştiren bölgelere odaklıyor.
Daha Geniş Bir Dokunma Algısı İçin Çoklu Kanallar
Bu bulgular üzerine inşa ederek, araştırmacılar aynı kompakt cihazda hem hafif hem de güçlü dokunuşları kapsayacak birden fazla iç kanala sahip sensörler geliştirdiler. Bir versiyonunda, farklı derinliklerde iki spiral kanal yer alır: sığ olan küçük kuvvetlere güçlü tepki verirken, daha derindeki olan yüksek yüklerde doğrusal kalır. Tek katmanlı tasarımlarda, “çiçek benzeri” ve “gerilme ölçer benzeri” yerleşimler yan yana farklı genişlikte veya kesitte iki kanal konumlandırır. Bir kanal daha yassı ve kolay deformasyona uğrarak nazik temaslara yüksek duyarlılık sağlarken, diğeri kuvvetler arttığında doğruluğu korur.
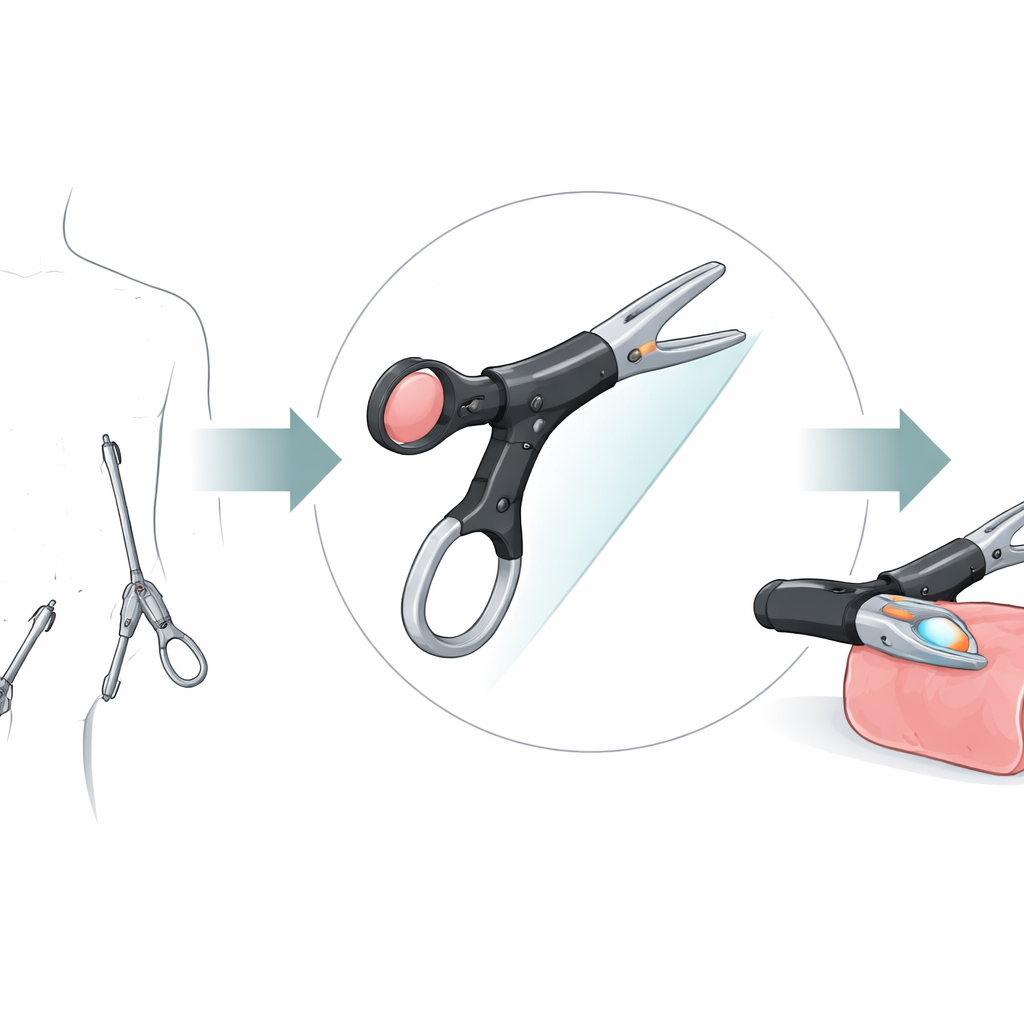
Laparoskopik Aletlere Dokunmayı Geri Getirmek
Pratik kullanımı göstermek için ekip, iki yumuşak sensörü standart bir laparoskopik tutucunun üzerine monte etti. Bir çenede diş desenli sensör doku benzeri silikon numunelere uygulanan kuvveti doğrudan ölçerken, sapın başparmak halkasındaki spiral sensör çeneleri kapatmak için cerrahın ne kadar bastığını yakaladı. Sensörlerin, birçok doku fantomunda kullanılan aynı tür yumuşak silikonla yapılmış olmaları sayesinde çıplak metale göre yüzeylere daha nazik temas ettikleri ve eğrilerle iyi örtüştükleri görüldü. Testler, tekrarlanan kavrama ve bırakma döngüleri sırasında tekrarlanabilir sinyaller gösterdi ve yumuşak çenelerin, katı bir metal tutucunun yaratacağından çok daha düşük gerilimler ürettiğini doğruladı. İki sensör birlikte, el hareketinin ve alet‑doku etkileşiminin gerçek zamanlı, zengin bir görünümünü sağlayabilir.
Geleceğin Cerrahi Dokunuşu İçin Ne Anlama Geliyor
Basitçe söylemek gerekirse, bu çalışma cerrahi aletlere ne kadar sıkıştırdıklarını algılayabilecek küçük, sıvı dolu “sinirlerin” entegre edilebileceğini gösteriyor. Cihazlar yumuşak, ucuz ve yaygın 3B baskı ile kalıplama yöntemleri kullanılarak üretilebildiğinden, farklı aletler, kuvvet aralıkları ve tek kullanımlık uygulamalar için uyarlanabilirler. Yazarlar, bu çok kanallı mikroakışkan sensörlerin minimal invaziv cerrahide dokunsal geribildirimi geri kazandıran daha akıllı aletlere gerçekçi bir yol olduğunu ve ayrıca güvenli, nazik dokunmanın hayati olduğu yumuşak robotlar ve insan‑makine arayüzlerine de uyarlanabileceğini sonucuna varıyorlar.
Atıf: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Anahtar kelimeler: yumuşak mikroakışkan kuvvet sensörü, laparoskopik tutucu, sıvı metal mikrokanal, dokunsal geribildirim, minimal invaziv cerrahi