Clear Sky Science · sv
Multikanal mjuka mikrofluidiska kraftsensorer: design, karakterisering och tillämpning i laparoskopi
Varför känsel genom kirurgiska verktyg spelar roll
När en kirurg arbetar genom små nyckelhålsincisioner skiljs händerna från patientens vävnader av långa, styva instrument. Mycket av den naturliga känseln försvinner, vilket gör det svårare att bedöma hur hårt man håller eller klämmer på känsliga organ. Denna artikel presenterar en ny klass av mjuka, vätskefyllda sensorer som kan byggas direkt på laparoskopiska verktyg, med målet att återge kirurger ett pålitligt känselsinne—utan att lägga till skrymmande hårdvara eller komplex elektronik. 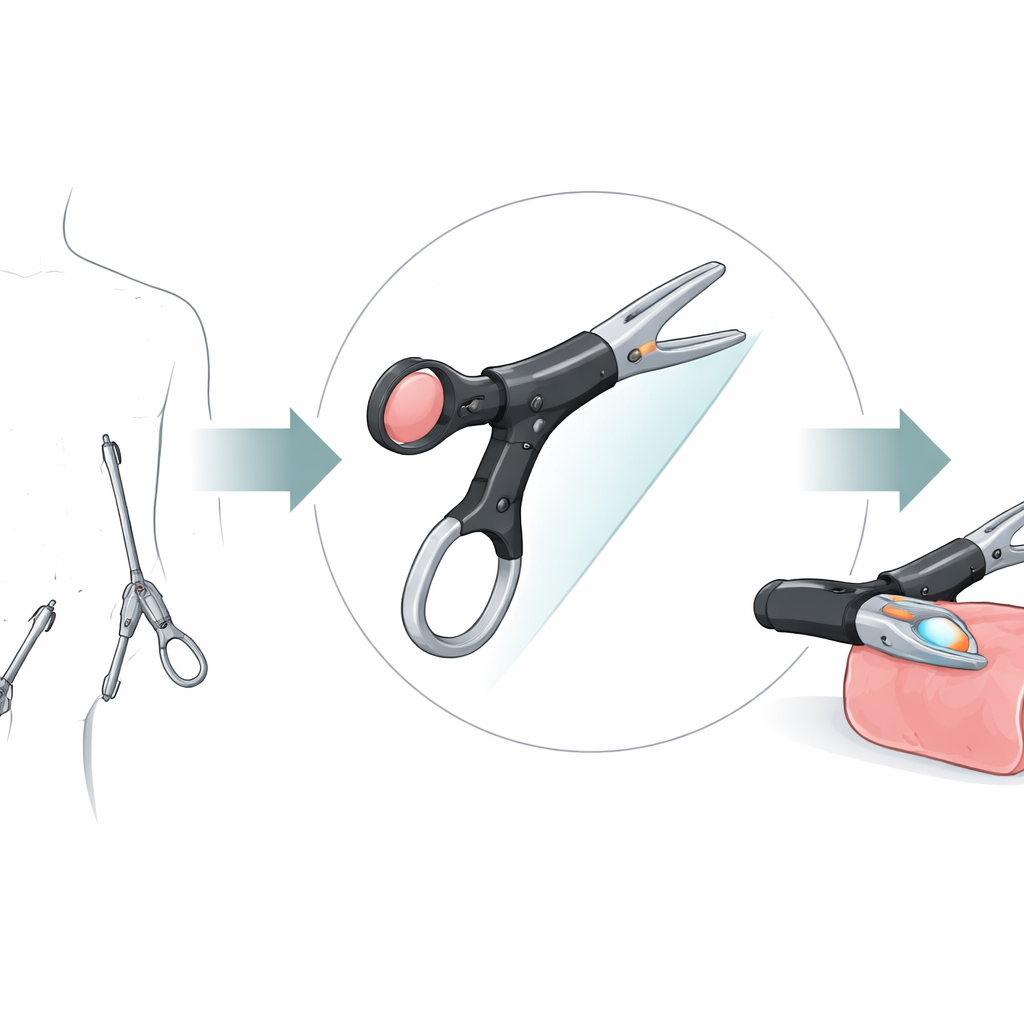
Mjuka sensorer som beter sig som artificiell hud
Sensorerna är tillverkade av ett gummiliknande silikon (PDMS) som omsluter hårtunna kanaler fyllda med en flytande metallegering. När sensorn pressas deformeras det mjuka silikonet och klämmer kanalerna, vilket minskar deras tvärsnittsarea. Eftersom metallbanan blir trängre och längre ökar dess elektriska resistans på ett förutsägbart sätt. Genom att mäta den förändringen omvandlar enheten fysisk kraft till en elektrisk signal. Författarna visar att dessa sensorer kan böjas, sträckas och vridas samtidigt som de fortfarande fungerar, vilket gör dem väl lämpade för krökta och rörliga ytor som kirurgiska instrument, mjuka robotar eller bärbara enheter.
Designval som justerar känsligheten
För att gå bortom enkla demonstrationer undersökte teamet systematiskt hur designparametrar påverkar prestanda. Med hjälp av datorsimuleringar och bänktester varierade de silikonets styvhet, sensorns totala tjocklek, kanalens djup under ytan samt kanalens form och storlek. Mjukare silikon, tunnare enheter och grundare kanaler gjorde sensorn mer responsiv eftersom de tillät större deformation vid samma pålagda belastning. Smalare kanaler förstärkte också effekten genom att koncentrera töjningen till en mindre vätskebana. Bland flera tvärsnittsformer gav en "omvänd trappstegsformad triangel"—bred upptill och smalare i steg nedåt—högst känslighet, eftersom dess geometri fokuserar klämningen till områden som mest påverkar den elektriska resistansen.
Flera kanaler för ett bredare känselsinne
Byggt på dessa insikter skapade forskarna sensorer med mer än en intern kanal för att täcka både lätt och stark beröring i samma kompakta enhet. I en version ligger två spiralformade kanaler på olika djup: den grundare reagerar starkt på små krafter medan den djupare förblir linjär vid högre belastningar. I enlagersdesigner placerar "blomliknande" och "dragfjäderliknande" layouter två kanaler sida vid sida med olika bredder eller tvärsnitt. Den ena kanalen är plattare och lättare att deformera, vilket ger hög känslighet vid mild kontakt, medan den andra behåller noggrannheten när krafterna ökar. 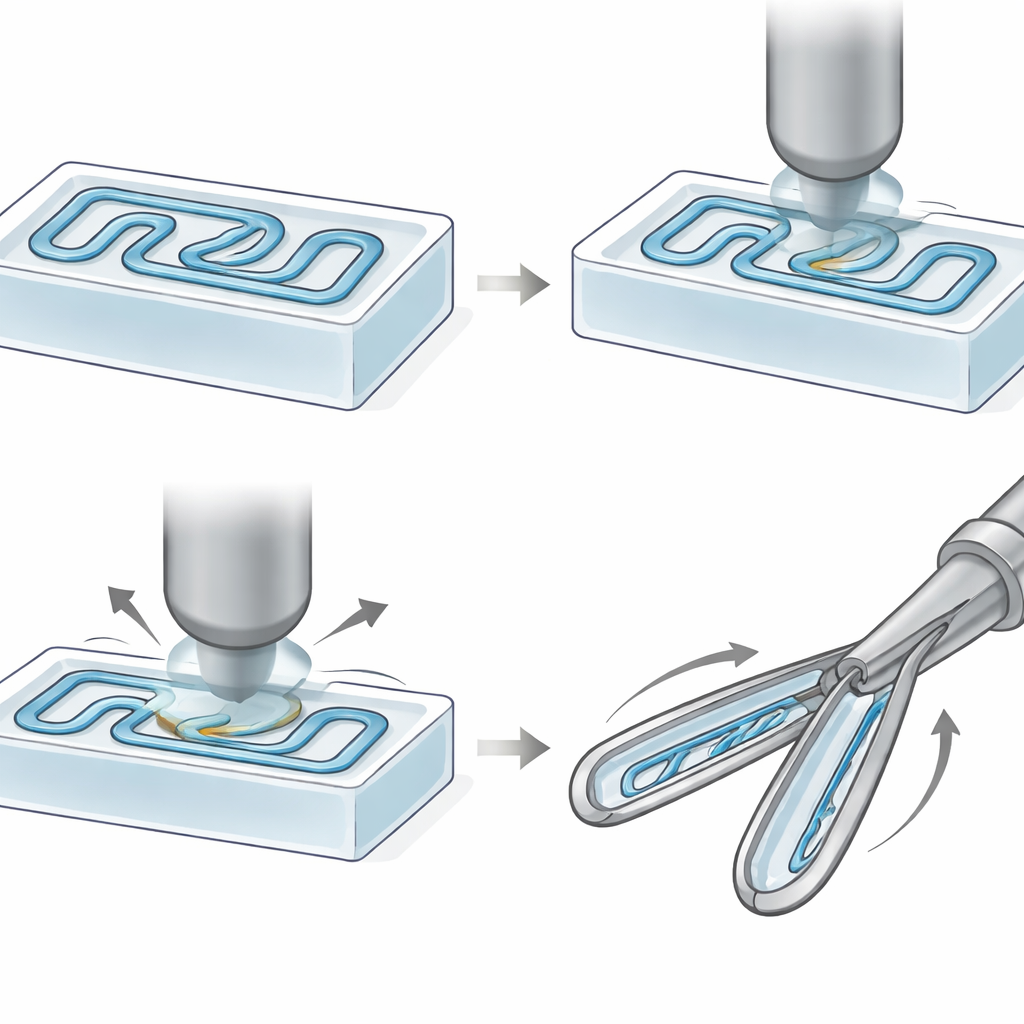
Återge känseln i laparoskopiska verktyg
För att demonstrera praktisk användning monterade teamet två mjuka sensorer på ett standard laparoskopiskt greppverktyg. En tandmönstrad sensor på ena käken mätte direkt kraften som applicerades på vävnadsliknande silikonsample, medan en spiralformad sensor på tumringen i handtaget fångade hur hårt kirurgen tryckte för att stänga käkarna. Eftersom sensorerna är gjorda av samma typ av mjukt silikon som många vävnadsfantomer, kontaktar de ytor mer skonsamt än bar metall och anpassar sig väl till kurvor. Tester visade reproducerbara signaler under upprepade grepp-och-frisläpp-cykler och bekräftade att de mjuka käkarna genererar mycket lägre påfrestning på modellvävnaden än ett styvt metallgrepp skulle göra. Tillsammans kan de två sensorerna ge en rik bild av både handens handling och verktyg–vävnadsinteraktionen i realtid.
Vad detta betyder för framtida kirurgisk känsel
Enkelt uttryckt visar detta arbete att små, vätskefyllda "nerver" kan byggas in i kirurgiska verktyg för att känna hur hårt de klämmer. Eftersom enheterna är mjuka, billiga och tillverkade med vanliga 3D-utskrift- och formningstekniker kan de anpassas för olika verktyg, kraftområden och även engångsbruk. Författarna drar slutsatsen att dessa multikanaliga mikrofluidiska sensorer är en realistisk väg mot smartare instrument som återställer taktil återkoppling vid minimalt invasiv kirurgi och som även kan anpassas för mjuka robotar och människa–maskin-gränssnitt där säker, skonsam beröring är avgörande.
Citering: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Nyckelord: mjuk mikrofluidisk kraftsensor, laparoskopiskt greppverktyg, flytande metall mikrokanaI, taktil återkoppling, minimalt invasiv kirurgi