Clear Sky Science · es
Sensores microfluídicos blandos multicanal: diseño, caracterización y aplicación en laparoscopia
Por qué importa sentir a través de las herramientas quirúrgicas
Cuando un cirujano opera a través de pequeñas incisiones en forma de ojo de cerradura, sus manos quedan separadas de los tejidos del paciente por instrumentos largos y rígidos. Gran parte del sentido natural del “tacto” se pierde, lo que dificulta juzgar con qué firmeza se está sujetando o apretando órganos delicados. Este artículo presenta una nueva clase de sensores blandos llenos de líquido que pueden integrarse directamente en herramientas laparoscópicas, con el objetivo de devolver a los cirujanos un sentido fiable del tacto—sin añadir hardware voluminoso ni electrónica compleja. 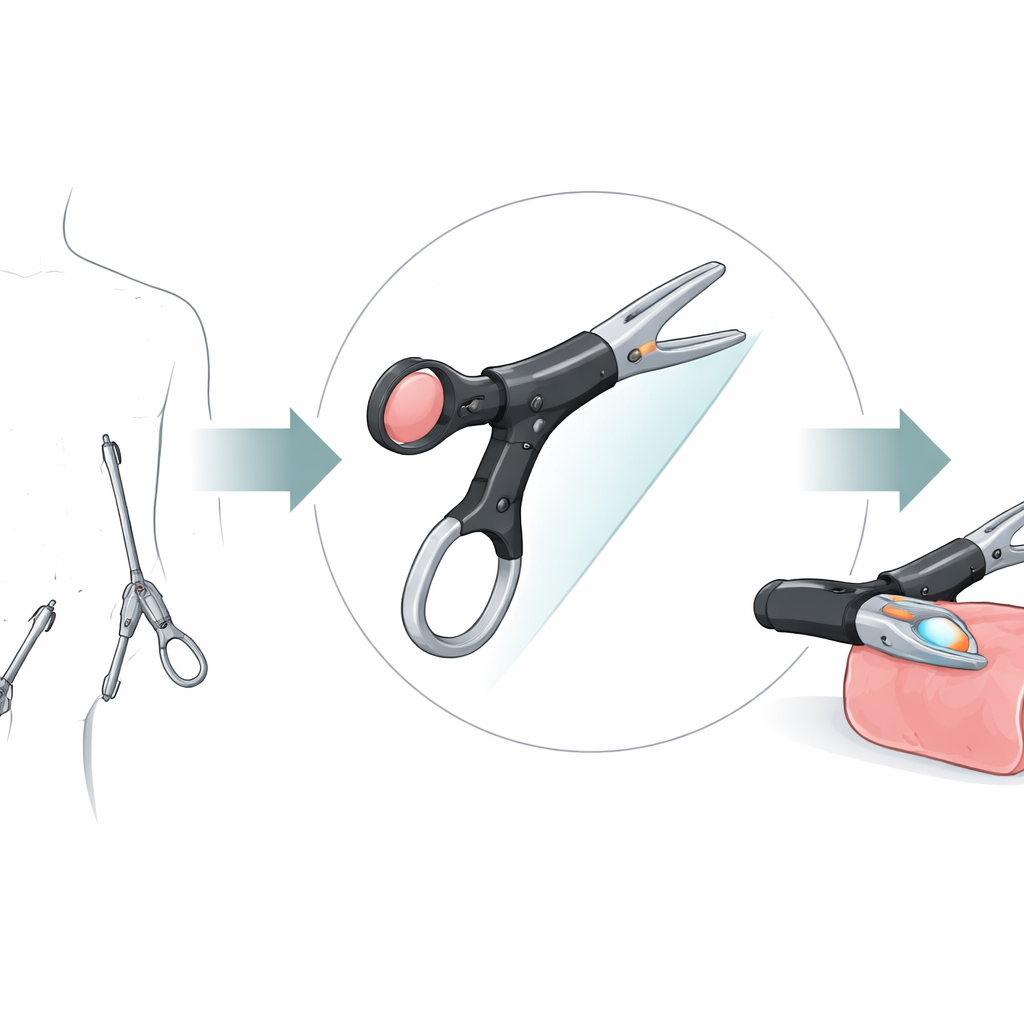
Sensores blandos que actúan como piel artificial
Los sensores están hechos de una silicona elástica (PDMS) que encierra canales finísimos llenos de una aleación de metal líquido. Cuando se presiona el sensor, la silicona blanda se deforma y aprieta los canales, reduciendo su sección transversal. Dado que la trayectoria del metal se estrecha y alarga, su resistencia eléctrica aumenta de manera predecible. Midiendo ese cambio, el dispositivo convierte la fuerza física en una señal eléctrica. Los autores muestran que estos sensores pueden doblarse, estirarse y torcerse sin dejar de funcionar, por lo que son adecuados para superficies curvas y en movimiento, como herramientas quirúrgicas, robots blandos o dispositivos vestibles.
Decisiones de diseño que ajustan la sensibilidad
Para ir más allá de demostraciones simples, el equipo exploró sistemáticamente cómo los detalles de diseño afectan el rendimiento. Mediante simulaciones por ordenador y pruebas de laboratorio, variaron la rigidez de la silicona, el espesor total del sensor, la profundidad del canal bajo la superficie y la forma y tamaño del canal. Silicona más blanda, dispositivos más delgados y canales más superficiales hicieron que el sensor fuera más sensible porque permitían mayor deformación con la misma carga aplicada. Canales más estrechos también amplificaron el efecto, concentrando la deformación en un camino de fluido más pequeño. Entre varias formas de sección transversal, un canal en “triángulo escalonado invertido”—ancho en la parte superior y más estrecho en escalones debajo—dio la mayor sensibilidad, porque su geometría enfoca la compresión en regiones que alteran con más fuerza la resistencia eléctrica.
Muchos canales para un sentido del tacto más amplio
A partir de estas ideas, los investigadores crearon sensores con más de un canal interno para abarcar tanto el tacto ligero como el firme en un mismo dispositivo compacto. En una versión, dos canales en espiral se sitúan a diferentes profundidades: el superficial reacciona con fuerza a fuerzas pequeñas, mientras que el más profundo permanece lineal a cargas mayores. En diseños de una sola capa, disposiciones “en forma de flor” y “tipo galga extensiométrica” colocan dos canales uno al lado del otro con anchuras o secciones transversales diferentes. Un canal es más plano y se deforma con mayor facilidad, proporcionando alta sensibilidad al contacto suave, mientras que el otro mantiene la precisión cuando las fuerzas aumentan. 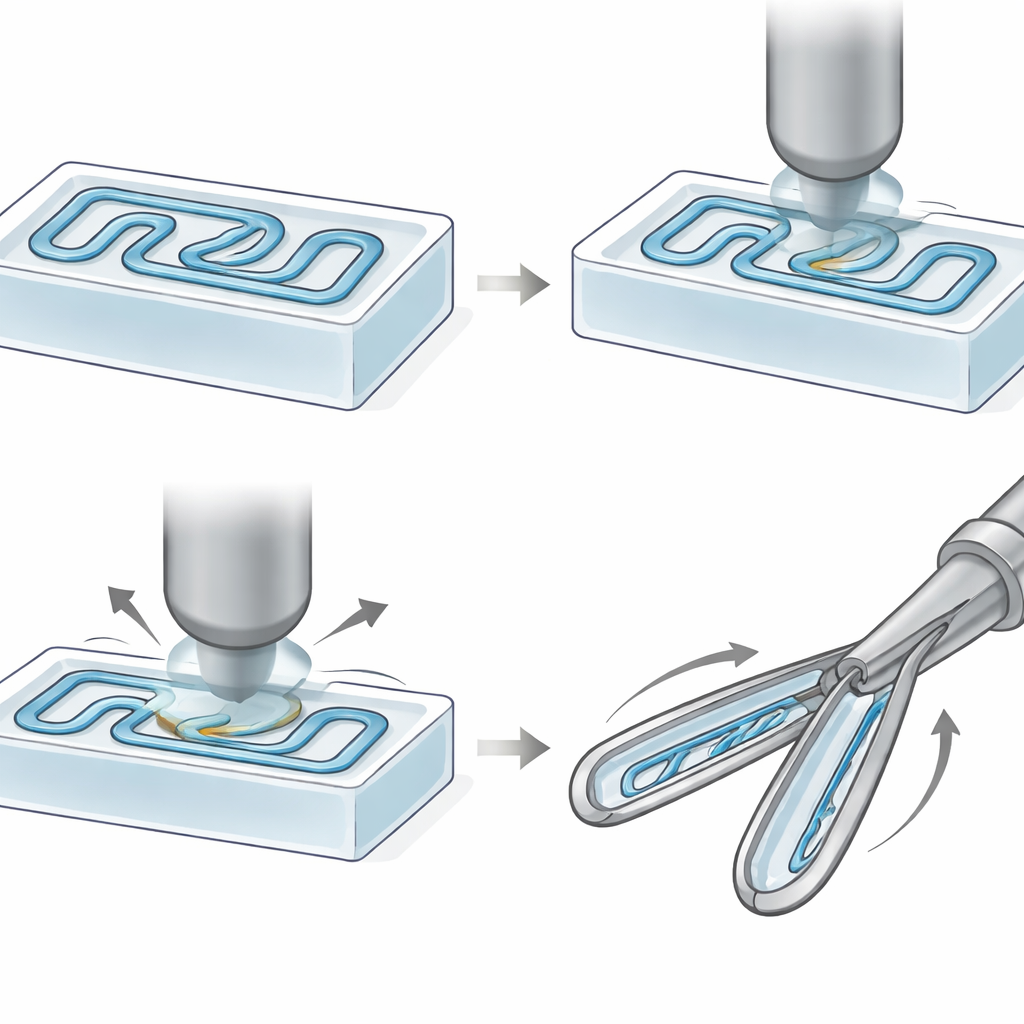
Devolver el tacto a las herramientas laparoscópicas
Para demostrar un uso práctico, el equipo montó dos sensores blandos en una pinza laparoscópica estándar. Un sensor con patrón de dientes en una de las mandíbulas midió directamente la fuerza aplicada a muestras de silicona similares a tejido, mientras que un sensor en espiral en el aro del pulgar del mango registró cuánta presión ejercía el cirujano para cerrar las mandíbulas. Como los sensores están hechos del mismo tipo de silicona blanda que muchos fantoches de tejido, contactan las superficies con mayor suavidad que el metal desnudo y se adaptan bien a las curvas. Las pruebas mostraron señales repetibles durante ciclos repetidos de agarre y liberación y confirmaron que las mandíbulas blandas generan tensiones mucho menores sobre el tejido modelo que produciría una pinza metálica rígida. Juntos, los dos sensores pueden ofrecer una visión rica tanto de la acción de la mano como de la interacción herramienta‑tejido en tiempo real.
Qué significa esto para el tacto quirúrgico del futuro
En términos sencillos, este trabajo demuestra que pequeñas “nervaduras” llenas de líquido pueden integrarse en herramientas quirúrgicas para detectar con qué fuerza están apretando. Debido a que los dispositivos son blandos, económicos y se fabrican con métodos comunes de impresión 3D y moldeo, pueden adaptarse a distintas herramientas, rangos de fuerza e incluso uso desechable. Los autores concluyen que estos sensores microfluídicos multicanal son una vía realista hacia instrumentos más inteligentes que restauren la retroalimentación táctil en la cirugía mínimamente invasiva y que también pueden adaptarse a robots blandos e interfaces humano‑máquina donde el contacto seguro y delicado es esencial.
Cita: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Palabras clave: sensor microfluídico blando, pinza laparoscópica, microcanal de metal líquido, retroalimentación táctil, cirugía mínimamente invasiva