Clear Sky Science · it
Sensori di forza microfluidici morbidi multicanale: progettazione, caratterizzazione e applicazione in laparoscopia
Perché sentire attraverso gli strumenti chirurgici è importante
Quando un chirurgo opera attraverso piccole incisioni a foro chiave, le sue mani sono separate dai tessuti del paziente da strumenti lunghi e rigidi. Gran parte della sensazione naturale del “tatto” si perde, rendendo più difficile giudicare quanto saldamente si sta afferrando o comprimendo organi delicati. Questo articolo introduce una nuova classe di sensori morbidi riempiti di fluido che possono essere integrati direttamente sugli strumenti laparoscopici, con l’obiettivo di restituire ai chirurghi un senso del tatto affidabile—senza aggiungere ingombrante hardware o complicata elettronica. 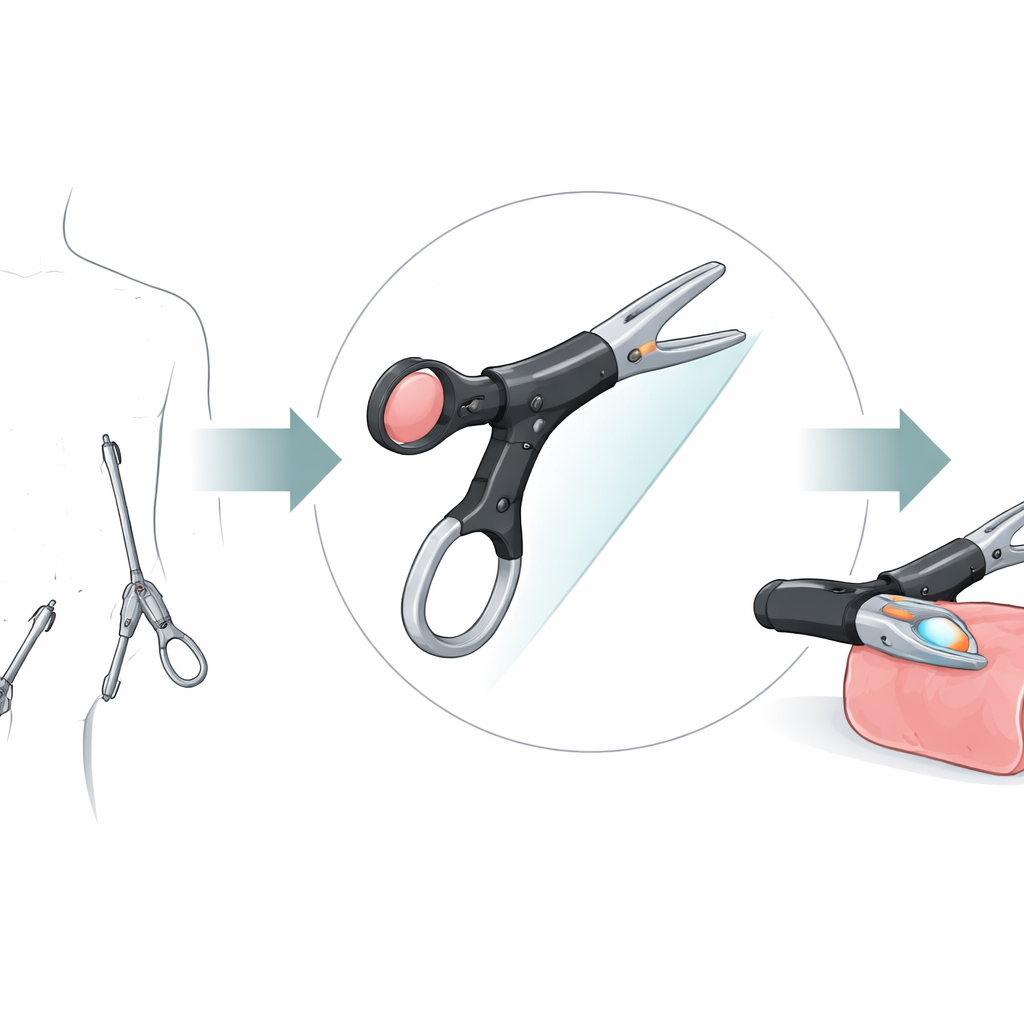
Sensori morbidi che si comportano come pelle artificiale
I sensori sono realizzati in silicone elastico (PDMS) che racchiude canali sottilissimi riempiti con una lega di metallo liquido. Quando il sensore viene premuto, il silicone morbido si deforma e comprime i canali, riducendone la sezione trasversale. Poiché il percorso metallico si fa più stretto e più lungo, la sua resistenza elettrica aumenta in modo prevedibile. Misurando questa variazione, il dispositivo converte la forza fisica in un segnale elettrico. Gli autori dimostrano che questi sensori possono piegarsi, allungarsi e torcersi pur continuando a funzionare, rendendoli adatti a superfici curve e in movimento come strumenti chirurgici, robot morbidi o dispositivi indossabili.
Scelte di progettazione che regolano la sensibilità
Per andare oltre semplici dimostrazioni, il team ha esplorato sistematicamente come i dettagli di progettazione influenzano le prestazioni. Utilizzando simulazioni al computer e test su banco, hanno variato la rigidità del silicone, lo spessore complessivo del sensore, la profondità del canale sotto la superficie e la forma e dimensione del canale. Silicone più morbido, dispositivi più sottili e canali più superficiali hanno reso il sensore più reattivo perché permettevano una maggiore deformazione per lo stesso carico applicato. Canali più stretti hanno inoltre amplificato l’effetto, concentrando la deformazione in un percorso fluido più piccolo. Tra diverse forme di sezione trasversale, un canale a “triangolo scalettato invertito”—largo in cima e più stretto a gradini sotto—ha fornito la massima sensibilità, perché la sua geometria concentra la compressione nelle regioni che alterano maggiormente la resistenza elettrica.
Molti canali per un senso del tatto più ampio
Sfruttando questi risultati, i ricercatori hanno creato sensori con più di un canale interno per coprire sia il contatto leggero sia quello più forte nello stesso dispositivo compatto. In una versione, due canali a spirale sono posti a diverse profondità: quello superficiale reagisce fortemente a forze piccole, mentre quello più profondo rimane lineare a carichi maggiori. Nei progetti monostrato, configurazioni “a fiore” e “simili a estensimetri” collocano due canali affiancati con larghezze o sezioni trasversali diverse. Un canale è più piatto e si deforma più facilmente, fornendo alta sensibilità al contatto delicato, mentre l’altro mantiene accuratezza quando le forze aumentano. 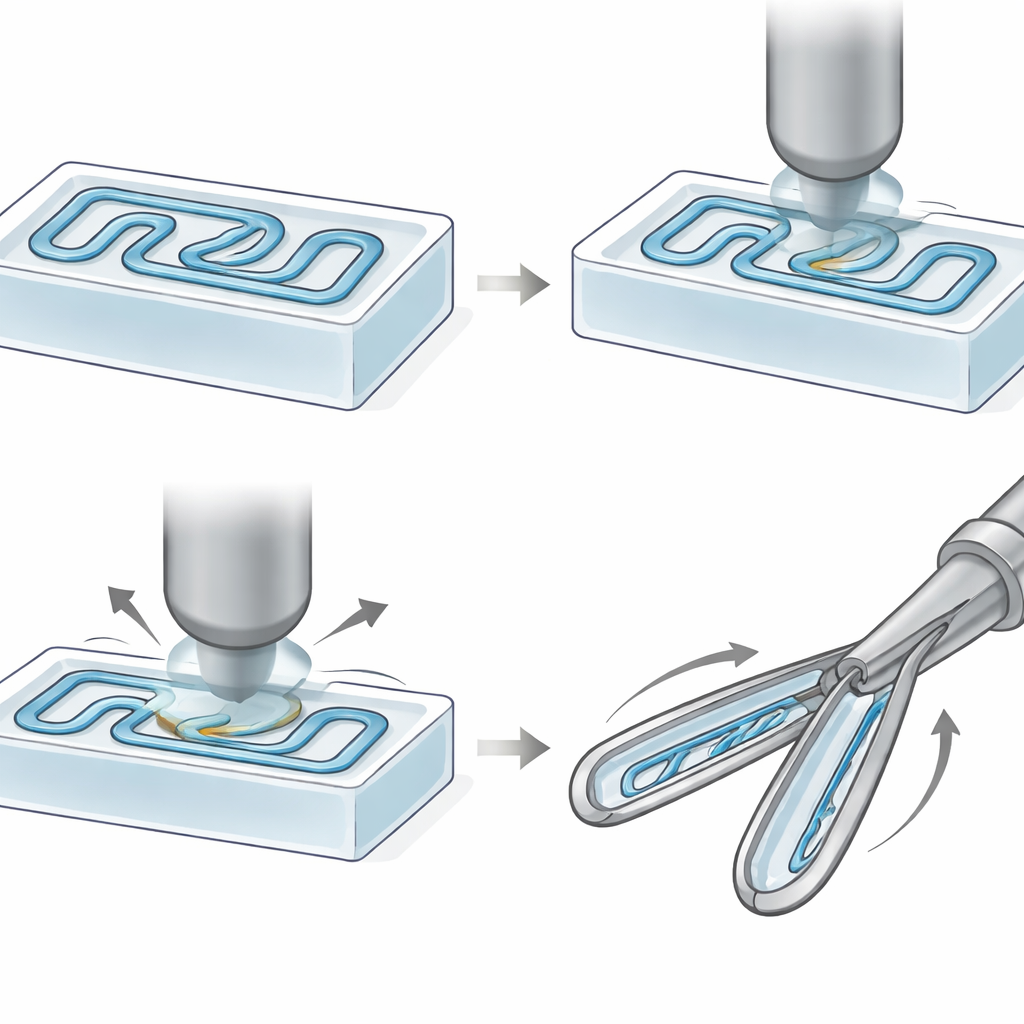
Riportare il tatto agli strumenti laparoscopici
Per dimostrare l’uso pratico, il team ha montato due sensori morbidi su una pinza laparoscopica standard. Un sensore con motivo a denti su una mascella misurava direttamente la forza applicata a campioni di silicone simili a tessuto, mentre un sensore a spirale sull’anello del pollice dell’impugnatura rilevava quanto forte il chirurgo premeva per chiudere le mascelle. Poiché i sensori sono fatti dello stesso tipo di silicone morbido di molti fantocci tissutali, entrano in contatto con le superfici in modo più delicato rispetto al metallo nudo e si conformano bene alle curve. I test hanno mostrato segnali ripetibili durante cicli ripetuti di presa e rilascio e hanno confermato che le mascelle morbide generano stress molto inferiori sul tessuto modello rispetto a una pinza metallica rigida. Insieme, i due sensori possono fornire una visione ricca sia dell’azione della mano sia dell’interazione strumento‑tessuto in tempo reale.
Cosa significa questo per il tatto chirurgico futuro
In termini semplici, questo lavoro dimostra che piccole “nervature” riempite di fluido possono essere integrate negli strumenti chirurgici per rilevare quanto forte stanno stringendo. Poiché i dispositivi sono morbidi, economici e prodotti con comuni metodi di stampa 3D e stampaggio, possono essere adattati a strumenti diversi, intervalli di forza differenti e persino a uso monouso. Gli autori concludono che questi sensori microfluidici multicanale rappresentano una strada realistica verso strumenti più intelligenti che ripristinano il feedback tattile nella chirurgia minimamente invasiva e possono essere anche adattati per robot morbidi e interfacce uomo‑macchina in cui un tocco sicuro e delicato è essenziale.
Citazione: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Parole chiave: sensore microfluidico morbido, pinza laparoscopica, microcanale con metallo liquido, feedback tattile, chirurgia minimamente invasiva