Clear Sky Science · ja
多チャネル柔軟マイクロ流体力センサー:設計、特性評価、および腹腔鏡手術への応用
なぜ手術器具を通した“触覚”が重要か
外科医が小さなキーホール切開から手術を行うとき、術者の手は長く硬い器具によって患者の組織から隔てられます。その結果、自然な「触る感覚」の多くが失われ、デリケートな臓器をどの程度の力で掴んだり圧迫したりしているかを正確に判断しにくくなります。本稿は、腹腔鏡器具に直接組み込める柔らかく液体で満たされたセンサーの新しいクラスを紹介し、かさばるハードウェアや複雑な電子回路を追加することなく、外科医に信頼できる触覚を取り戻すことを目指します。 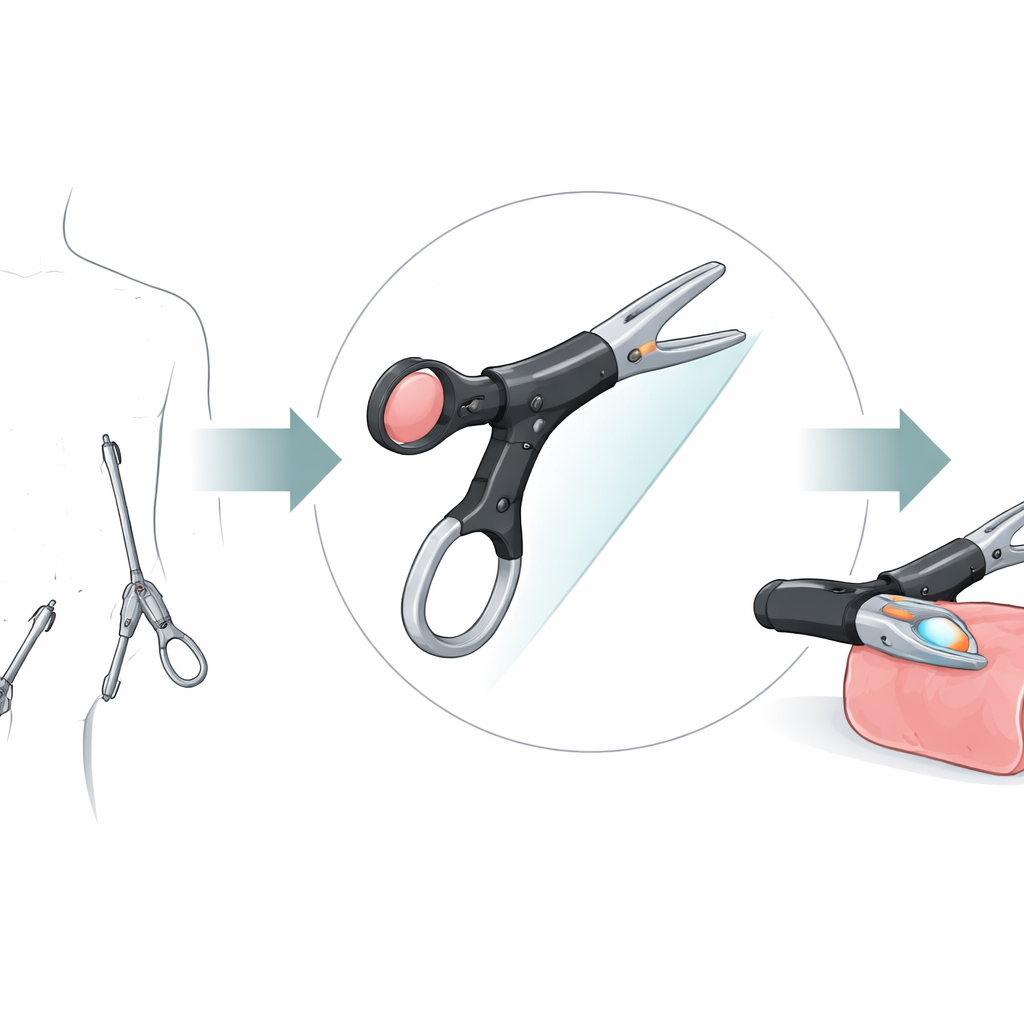
人工皮膚のように振る舞う柔らかいセンサー
これらのセンサーは、液体金属合金で満たされた髪の毛程度に細いチャネルを内包するゴム状のシリコーン(PDMS)から作られています。センサーが押されると、柔らかいシリコーンが変形してチャネルを締め付け、断面積が狭くなります。金属の通路が細く長くなるため、その電気抵抗は予測可能な形で増加します。抵抗の変化を測定することで、装置は物理的な力を電気信号に変換します。著者らは、これらのセンサーが曲げ、伸張、ねじれに対しても機能を維持できることを示しており、手術器具や軟体ロボット、ウェアラブル機器など曲面や可動面に適していることを示しています。
感度を調整する設計上の選択
単なる実証を越えるために、研究チームは設計の細部が性能にどう影響するかを体系的に検討しました。コンピュータシミュレーションとベンチトップ試験を用いて、シリコーンの剛性、センサーの全厚、表面下のチャネル深さ、チャネルの形状・寸法を変化させました。より柔らかいシリコーン、薄いデバイス、浅いチャネルはいずれも同じ荷重でより大きな変形を許すため感度を高めました。狭いチャネルは効果を増幅し、ひずみをより小さな流路に集中させます。複数の断面形状の中で、上部が広く下に向かって段差で狭くなる「逆ステップ三角形」チャネルは、幾何学的に締め付けを感度に最も影響する領域に集中させるため、最高の感度を示しました。
広い触覚を得るための多チャネル化
これらの知見を踏まえて、研究者らは軽い接触から強い接触までを同じコンパクトなデバイスでカバーするため、内部に複数チャネルを持つセンサーを作製しました。あるバージョンでは、異なる深さに二つの螺旋チャネルが配置されています:浅い方は小さな力に対して強く反応し、深い方はより高い荷重でも線形性を保ちます。単層設計では、「花弁状」や「ストレインゲージ風」の配置が二つのチャネルを隣接させ、幅や断面を変えています。片方のチャネルは平たく変形しやすく、弱い接触へ高い感度を提供し、もう一方は力が大きくなっても精度を維持します。 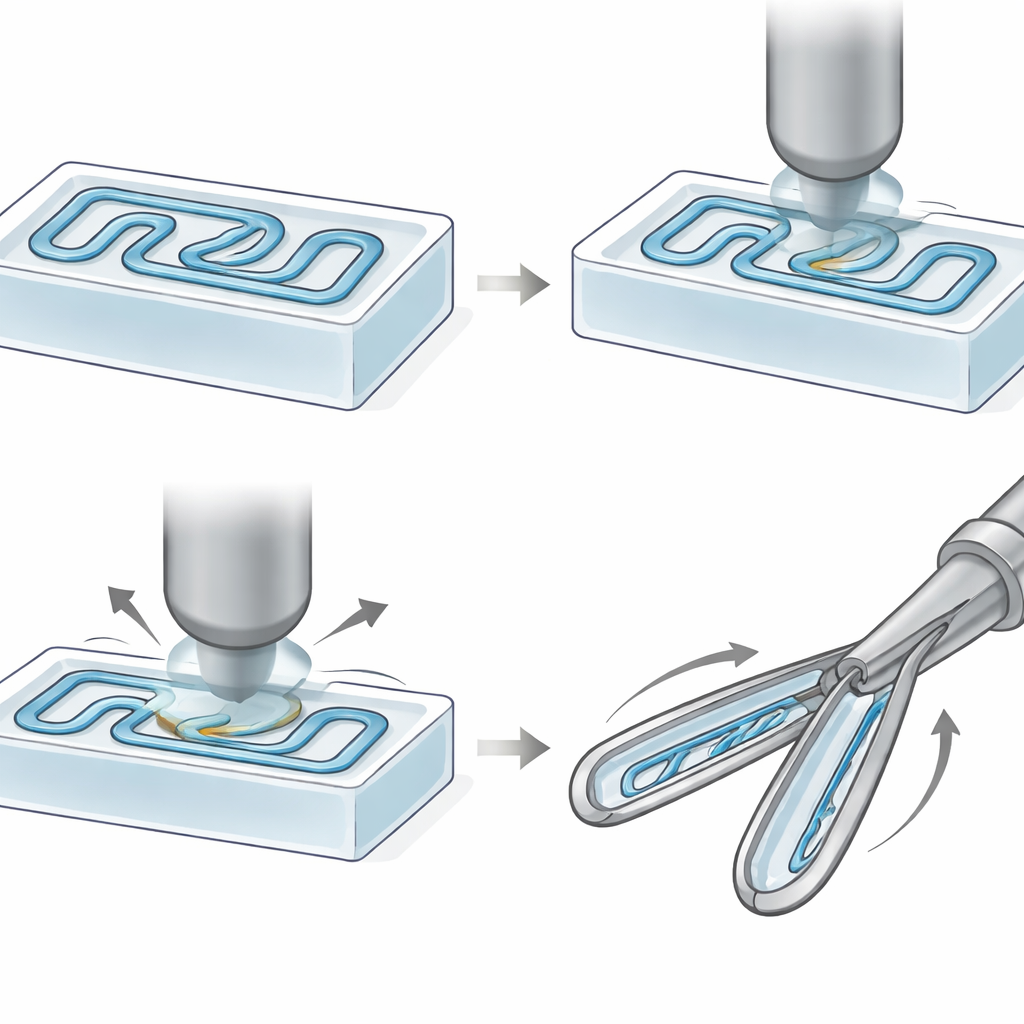
腹腔鏡器具に触覚を取り戻す
実用性を示すために、チームは標準的な腹腔鏡用グレイスパーに二つの柔らかいセンサーを取り付けました。一方の顎には歯状パターンのセンサーを載せ、組織様シリコーンサンプルに加えられる力を直接測定し、ハンドルのサムリングには螺旋センサーを置いて顎を閉じる際に術者がどれだけ強く押しているかを捉えました。センサーは多くの組織ファントムと同じ種類の柔らかいシリコーンで作られているため、露出した金属よりも表面に優しく接触し、曲面にも良く追従します。試験では把持・離放の繰り返しサイクルで再現性のある信号が得られ、柔らかい顎がモデル組織に与える応力が剛性金属グレイスパーよりもはるかに低いことが確認されました。これら二つのセンサーにより、術者の操作と器具‑組織相互作用の両方についてリアルタイムで豊富な情報を提供できます。
今後の手術触覚にとっての意義
簡潔に言えば、本研究は微小な液体充填の「神経」を手術器具に組み込んで、どれだけ強く握っているかを感知できることを示しています。これらのデバイスは柔らかく安価で、一般的な3Dプリンティングや鋳型法で製造できるため、異なる器具や力の範囲、使い捨て用途に合わせて調整できます。著者らは、多チャネルマイクロ流体センサーが低侵襲手術での触覚フィードバックを回復するより賢い器具への現実的な道であり、安全で優しい触れ方が重要な軟体ロボットや人間‑機械インターフェースにも適用できると結論づけています。
引用: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
キーワード: 柔軟マイクロ流体力センサー, 腹腔鏡用グレイスパー, 液体金属マイクロチャネル, 触覚フィードバック, 低侵襲手術