Clear Sky Science · fr
Capteurs de force microfluidiques mous multicanaux : conception, caractérisation et application en laparoscopie
Pourquoi ressentir via les instruments chirurgicaux est important
Lorsque le chirurgien opère par de petites incisions, ses mains sont séparées des tissus du patient par de longs instruments rigides. Une grande partie du sens naturel du « toucher » est perdue, rendant plus difficile l’évaluation de la force de préhension ou de compression des organes fragiles. Cet article présente une nouvelle famille de capteurs souples remplis de liquide qui peuvent être intégrés directement sur les instruments laparoscopiques, avec pour objectif de restituer aux chirurgiens un sens tactile fiable — sans ajouter de matériel encombrant ni d’électronique complexe. 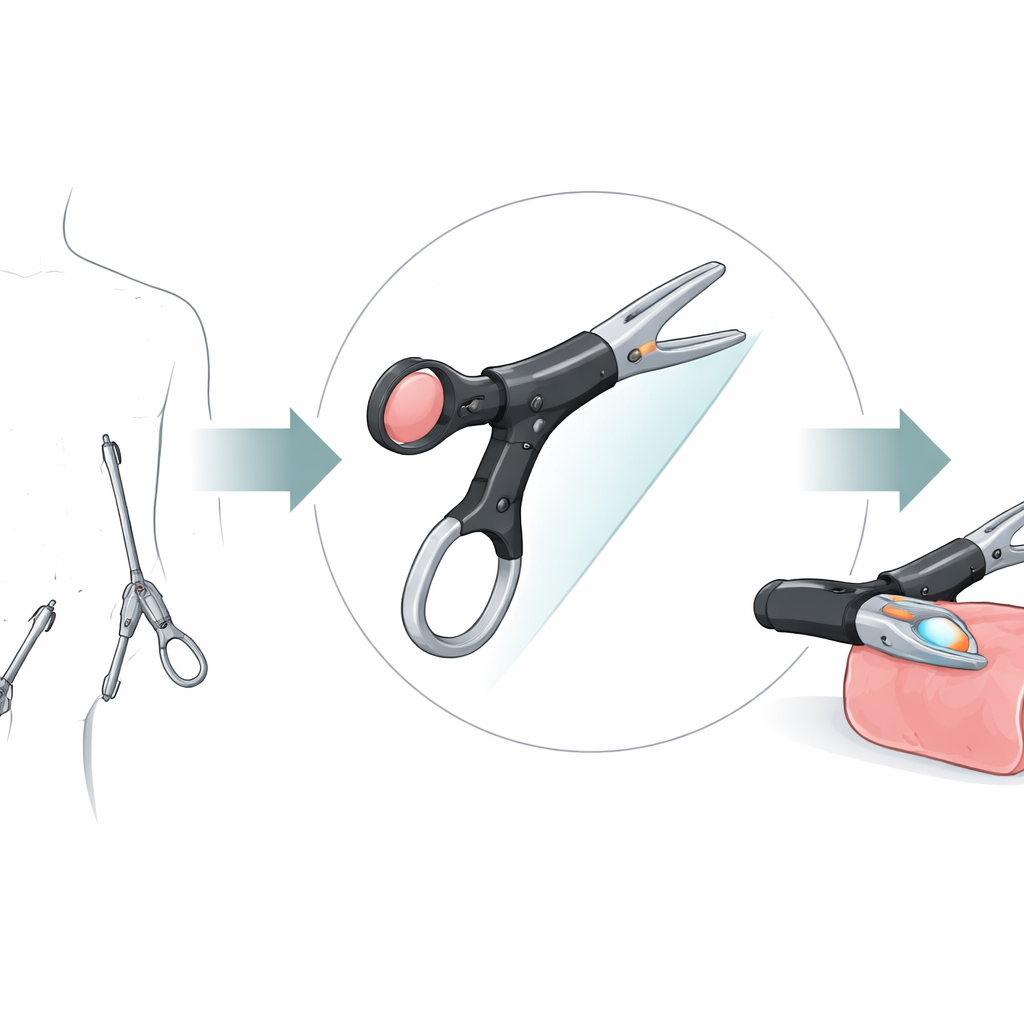
Des capteurs souples qui se comportent comme une peau artificielle
Les capteurs sont fabriqués en silicone élastique (PDMS) contenant des canaux microscopiques remplis d’un alliage de métal liquide. Lorsqu’on appuie sur le capteur, le silicone souple se déforme et comprime les canaux, réduisant leur section transversale. Comme le trajet du métal devient plus étroit et plus long, sa résistance électrique augmente de manière prévisible. En mesurant cette variation, le dispositif convertit une force mécanique en un signal électrique. Les auteurs montrent que ces capteurs peuvent se plier, s’étirer et se tordre tout en conservant leur fonctionnement, ce qui les rend bien adaptés aux surfaces courbes et mobiles comme les instruments chirurgicaux, les robots mous ou les dispositifs portables.
Choix de conception qui ajustent la sensibilité
Pour dépasser les simples démonstrations, l’équipe a exploré systématiquement comment les détails de conception influent sur les performances. À l’aide de simulations numériques et d’essais en banc, ils ont fait varier la rigidité du silicone, l’épaisseur globale du capteur, la profondeur du canal sous la surface, ainsi que la forme et la taille du canal. Un silicone plus souple, des dispositifs plus fins et des canaux plus superficiels rendent le capteur plus réactif parce qu’ils autorisent une plus grande déformation pour une même charge appliquée. Des canaux plus étroits amplifient également l’effet en concentrant la déformation dans un trajet de fluide plus restreint. Parmi plusieurs profils de section, un canal en « triangle étagé inversé » — large en surface et étroit par paliers en dessous — a offert la sensibilité la plus élevée, car sa géométrie concentre l’écrasement dans des régions qui modifient fortement la résistance électrique.
Plusieurs canaux pour un sens du toucher étendu
S’appuyant sur ces observations, les chercheurs ont créé des capteurs contenant plus d’un canal interne pour couvrir à la fois le toucher léger et le contact fort dans un même dispositif compact. Dans une version, deux canaux en spirale sont disposés à des profondeurs différentes : le canal superficiel réagit fortement aux faibles forces, tandis que le canal plus profond reste linéaire à des charges plus élevées. Dans des conceptions monofeuille, des agencements « en fleur » et « semblables à des jauges de déformation » placent deux canaux côte à côte avec des largeurs ou des sections transversales différentes. Un canal est plus aplati et se déforme plus facilement, offrant une haute sensibilité au contact délicat, tandis que l’autre maintient la précision lorsque les forces augmentent. 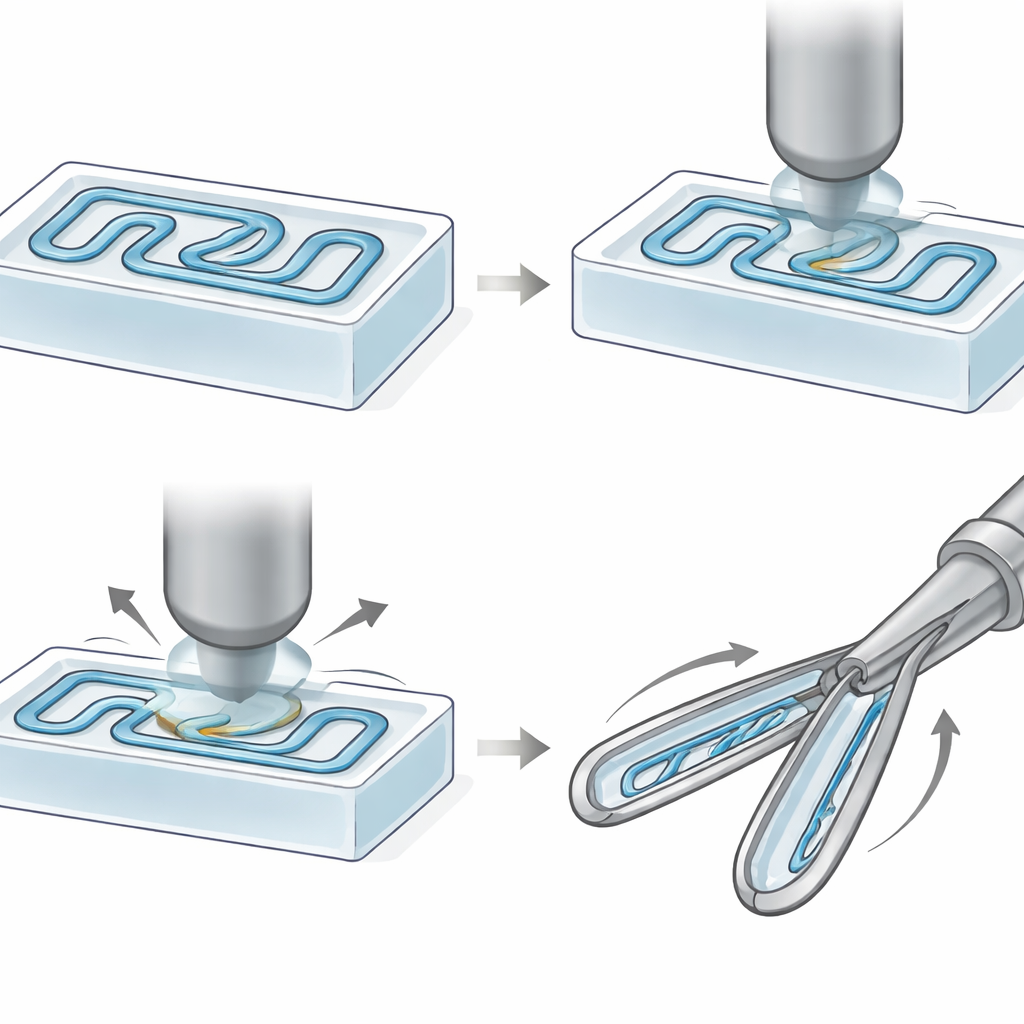
Redonner le toucher aux instruments laparoscopiques
Pour démontrer une utilisation pratique, l’équipe a monté deux capteurs souples sur un préenseur laparoscopique standard. Un capteur à motif dentelé sur une mâchoire mesurait directement la force appliquée à des échantillons en silicone simulant les tissus, tandis qu’un capteur en spirale sur la bague du pouce de la poignée enregistrait la force exercée par le chirurgien pour fermer les mâchoires. Parce que les capteurs sont faits du même type de silicone souple que beaucoup de fantômes tissulaires, ils contactent les surfaces plus délicatement qu’un métal nu et s’adaptent bien aux courbures. Les tests ont montré des signaux reproductibles lors de cycles répétés de préhension et de relâche, et ont confirmé que les mâchoires souples génèrent des contraintes beaucoup plus faibles sur le modèle de tissu qu’un préenseur métallique rigide. Ensemble, les deux capteurs peuvent fournir une vision riche de l’action de la main et de l’interaction outil‑tissu en temps réel.
Ce que cela signifie pour le toucher chirurgical futur
En termes simples, ce travail montre que de minuscules « nerfs » remplis de fluide peuvent être intégrés aux instruments chirurgicaux pour détecter la force de serrage. Parce que ces dispositifs sont souples, peu coûteux et fabriqués par des méthodes courantes d’impression 3D et de moulage, ils peuvent être adaptés à différents outils, plages de force, et même à un usage jetable. Les auteurs concluent que ces capteurs microfluidiques multicanaux représentent une voie réaliste vers des instruments plus intelligents qui rétablissent le retour tactile en chirurgie mini‑invasive et peuvent aussi être adaptés pour les robots mous et les interfaces homme‑machine où un contact sûr et délicat est essentiel.
Citation: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Mots-clés: capteur microfluidique souple, préenseur laparoscopique, microcanal en métal liquide, rétroaction tactile, chirurgie mini‑invasive