Clear Sky Science · de
Multikanalige weiche mikrofluidische Kraftsensoren: Design, Charakterisierung und Anwendung in der Laparoskopie
Warum das Fühlen durch chirurgische Werkzeuge wichtig ist
Wenn ein Chirurg durch winzige Schlüssellochinzisionen operiert, sind seine Hände durch lange, starre Instrumente von den Geweben des Patienten getrennt. Ein großer Teil des natürlichen Gefühls für „Tastsinn“ geht verloren, wodurch es schwieriger wird, einzuschätzen, wie fest empfindliche Organe gegriffen oder zusammengedrückt werden. Diese Arbeit stellt eine neue Klasse weicher, mit Flüssigkeit gefüllter Sensoren vor, die direkt auf laparoskopische Instrumente integriert werden können, mit dem Ziel, Chirurgen ein verlässliches Tastempfinden zurückzugeben — ohne sperrige Hardware oder komplexe Elektronik hinzuzufügen. 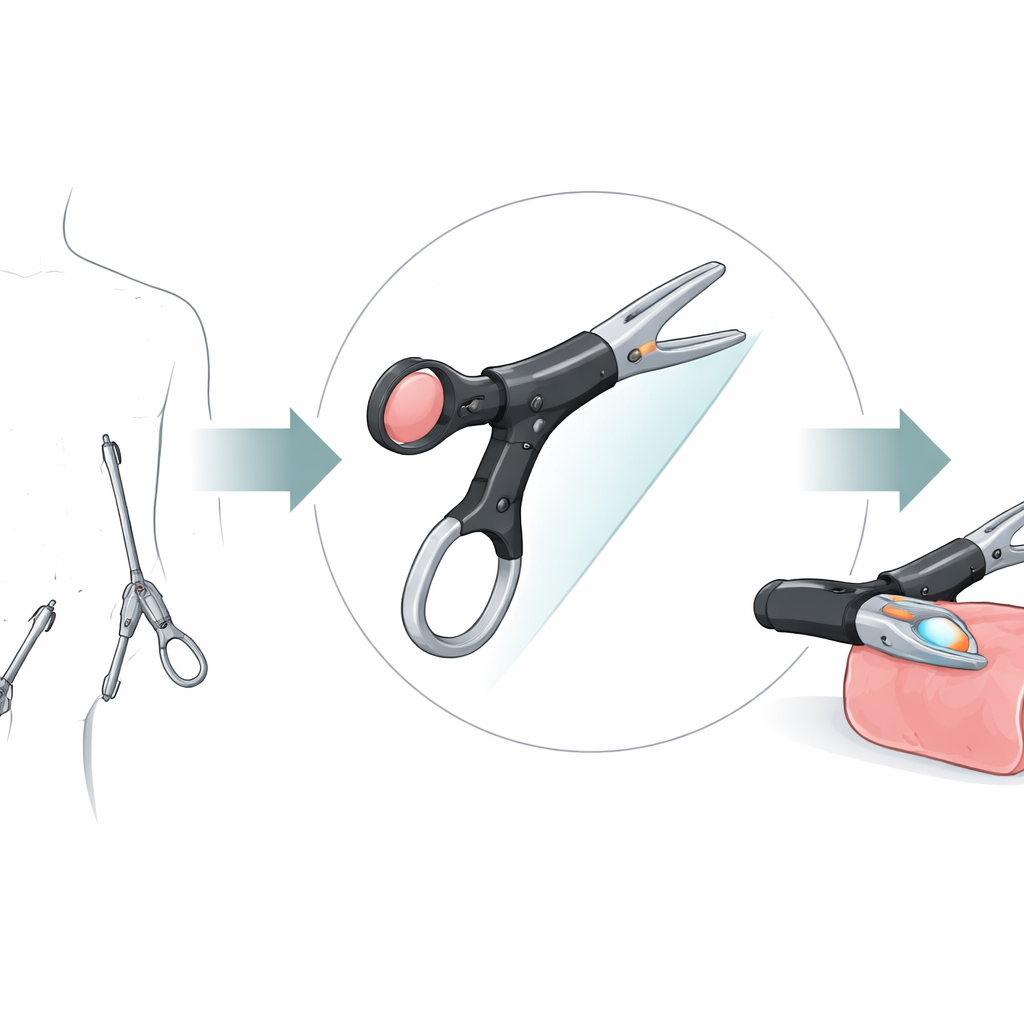
Weiche Sensoren, die sich wie künstliche Haut verhalten
Die Sensoren bestehen aus einem gummiartigen Silikon (PDMS), das haarfeine Kanäle umschließt, die mit einer Flüssigmetalllegierung gefüllt sind. Wenn der Sensor gedrückt wird, verformt sich das weiche Silikon und quetscht die Kanäle zusammen, wodurch ihr Querschnitt enger wird. Da der Metallpfad dadurch enger und länger wird, steigt sein elektrischer Widerstand auf vorhersehbare Weise. Durch Messung dieser Änderung wandelt das Gerät physische Kraft in ein elektrisches Signal um. Die Autoren zeigen, dass diese Sensoren biegen, dehnen und verdrehen können und dabei weiterhin funktionieren, was sie gut geeignet macht für gekrümmte und bewegte Oberflächen wie chirurgische Instrumente, weiche Roboter oder tragbare Geräte.
Designentscheidungen zur Abstimmung der Empfindlichkeit
Um über einfache Demonstrationen hinauszugehen, untersuchte das Team systematisch, wie Designdetails die Leistung beeinflussen. Mithilfe von Computersimulationen und Labortests variierten sie die Steifigkeit des Silikons, die Gesamtdicke des Sensors, die Tiefe des Kanals unter der Oberfläche sowie Form und Größe des Kanals. Weicheres Silikon, dünnere Bauteile und flachere Kanäle machten den Sensor responsiver, weil sie bei derselben Belastung mehr Verformung zuließen. Schmalere Kanäle verstärkten den Effekt zusätzlich, indem sie die Dehnung auf einen kleineren Flüssigkeitspfad konzentrierten. Unter mehreren Querschnittsformen ergab ein „invertierter gestufter Dreieck“-Kanal — oben breit und darunter in Stufen schmaler werdend — die höchste Empfindlichkeit, weil seine Geometrie das Einklemmen in Regionen fokussiert, die den elektrischen Widerstand am stärksten verändern.
Mehrere Kanäle für ein breiteres Tastempfinden
Aufbauend auf diesen Erkenntnissen entwickelten die Forschenden Sensoren mit mehr als einem internen Kanal, um sowohl leichtes als auch kräftiges Tasten in demselben kompakten Bauteil abzudecken. In einer Version liegen zwei spiralige Kanäle in unterschiedlichen Tiefen: der flache reagiert stark auf kleine Kräfte, während der tiefere bei höheren Lasten linear bleibt. In einlagigen Designs platzieren „blütenähnliche“ und „Dehnungsmessstreifen‑ähnliche“ Anordnungen zwei Kanäle nebeneinander mit unterschiedlichen Breiten oder Querschnitten. Ein Kanal ist flacher und leichter verformbar und bietet hohe Empfindlichkeit bei sanftem Kontakt, während der andere bei zunehmender Kraft die Genauigkeit bewahrt. 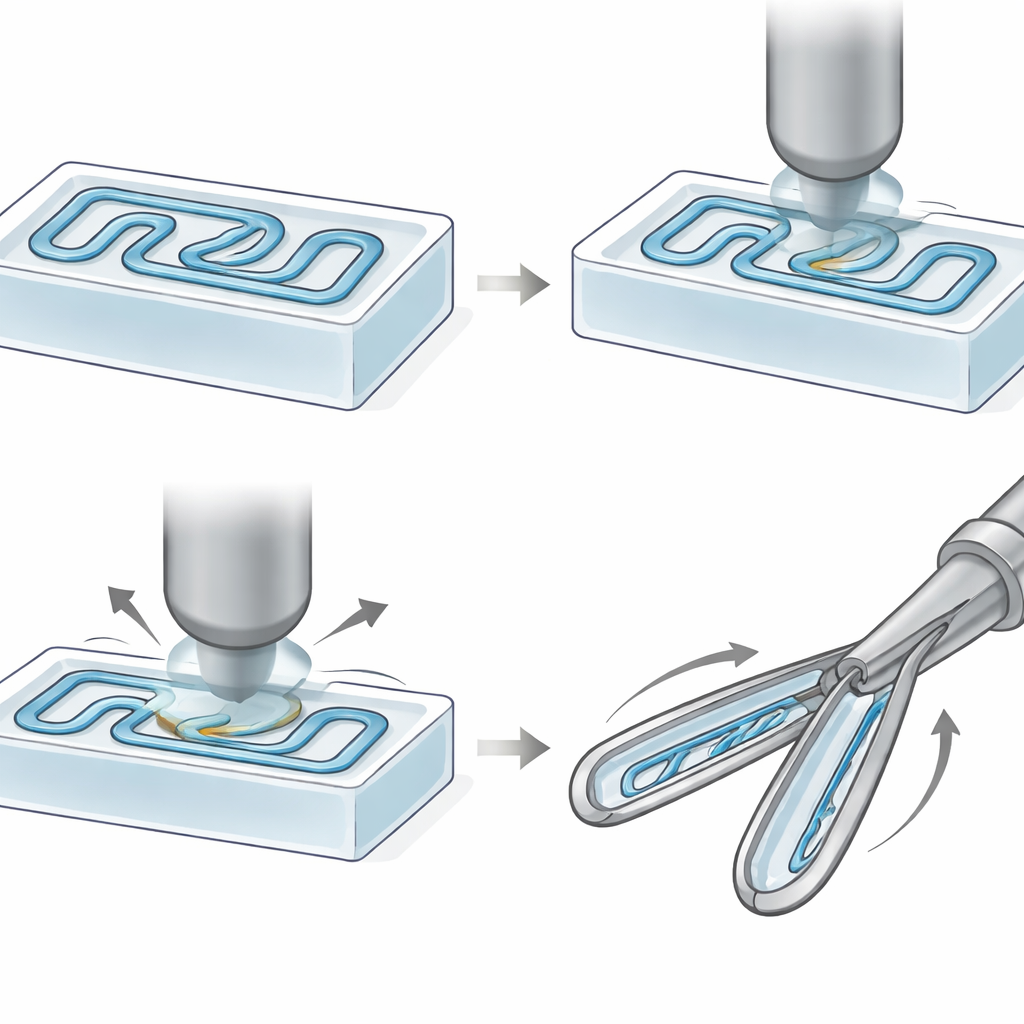
Taktilität zurück an laparoskopischen Instrumenten
Um die praktische Anwendbarkeit zu demonstrieren, befestigte das Team zwei weiche Sensoren an einem standardmäßigen laparoskopischen Greifer. Ein zahnförmig gestalteter Sensor an einer Backe maß direkt die auf gewebsähnliche Silikonproben ausgeübte Kraft, während ein Spiral‑Sensor am Daumenring des Griffs erfasste, wie stark der Operateur drückte, um die Backen zu schließen. Da die Sensoren aus derselben Art weichen Silikons bestehen wie viele Gewebephantome, kontaktieren sie Oberflächen schonender als blankes Metall und passen sich gut an Kurven an. Tests zeigten reproduzierbare Signale während wiederholter Greif‑und‑Loslass‑Zyklen und bestätigten, dass die weichen Backen deutlich geringere Spannungen im Modellgewebe erzeugen als ein starrer Metallgreifer. Zusammen bieten die beiden Sensoren in Echtzeit ein reichhaltiges Bild sowohl der Handbewegung als auch der Werkzeug‑Gewebe‑Interaktion.
Was das für den zukünftigen chirurgischen Tastsinn bedeutet
Vereinfacht gesagt zeigt diese Arbeit, dass winzige, mit Flüssigkeit gefüllte „Nerven“ in chirurgische Instrumente eingebaut werden können, um zu erfassen, wie fest sie zusammendrücken. Da die Bauteile weich, kostengünstig und mit gängigen 3D‑Druck‑ und Formgebungsverfahren herstellbar sind, lassen sie sich für verschiedene Instrumente, Kraftbereiche und sogar als Einwegprodukte anpassen. Die Autoren schlussfolgern, dass diese multikanaligen mikrofluidischen Sensoren einen realistischen Weg zu intelligenteren Instrumenten darstellen, die taktiles Feedback in der minimalinvasiven Chirurgie wiederherstellen, und sich ebenso für weiche Roboter und Mensch‑Maschine‑Schnittstellen eignen, in denen sichere, schonende Berührung entscheidend ist.
Zitation: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Schlüsselwörter: weicher mikrofluidischer Kraftsensor, laparoskopischer Greifer, Flüssigmetall‑Mikrokanal, taktiles Feedback, minimalinvasive Chirurgie