Clear Sky Science · nl
Meerkanaals zachte microfluïdische krachtsensoren: ontwerp, karakterisering en toepassing in laparoscopie
Waarom voelen via chirurgische instrumenten ertoe doet
Wanneer een chirurg opereert via kleine sleutelgataiincisies, liggen de handen ver van het weefsel door lange, stijve instrumenten. Een groot deel van het natuurlijke gevoel van “voelen” gaat zo verloren, waardoor het lastiger wordt in te schatten hoe stevig men zachte organen vastpakt of samendrukt. Dit artikel introduceert een nieuwe klasse zachte, met vloeistof gevulde sensoren die direct op laparoscopische instrumenten kunnen worden geïntegreerd, met als doel chirurgen een betrouwbaar gevoel van aanraking terug te geven — zonder omvangrijke hardware of complexe elektronica toe te voegen. 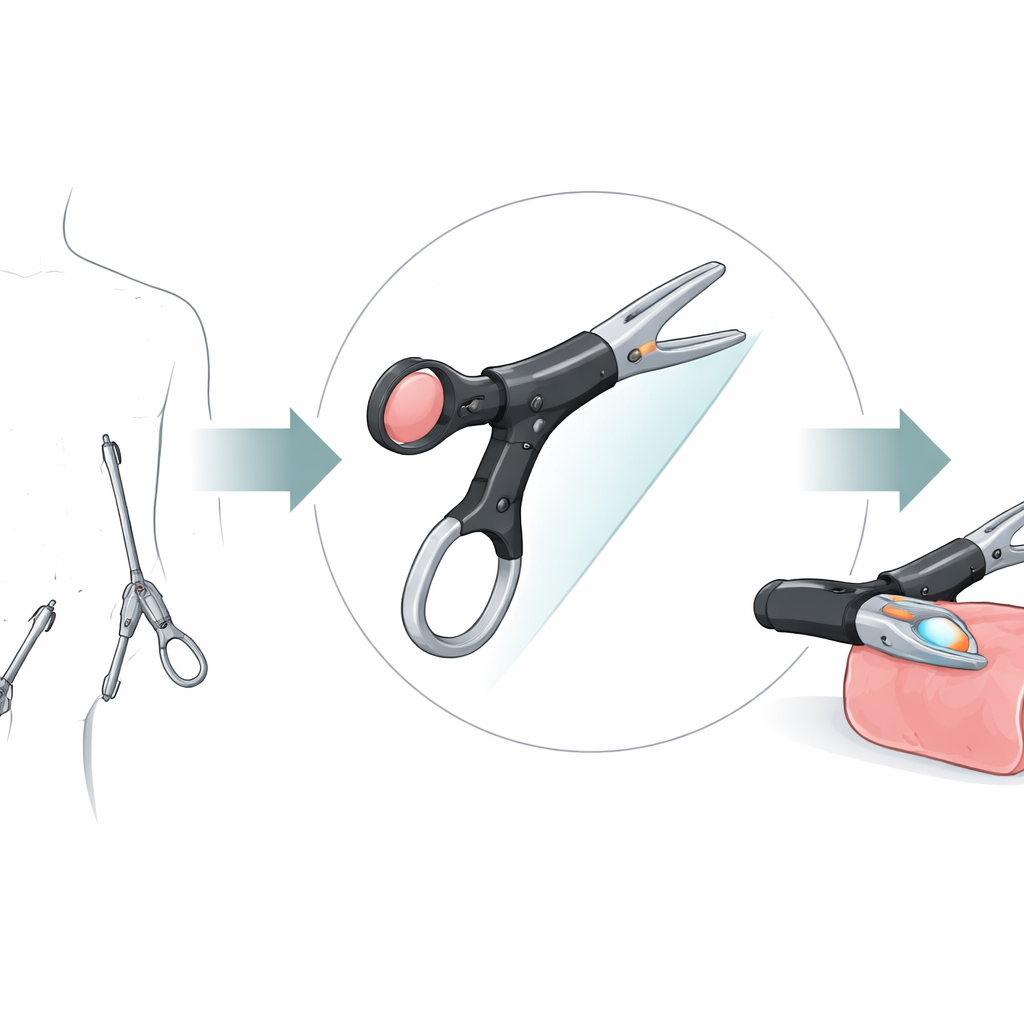
Zachte sensoren die zich gedragen als kunstmatige huid
De sensoren zijn vervaardigd uit een rubberachtige silicone (PDMS) die haarfijne kanalen omsluit, gevuld met een vloeibare metaallegering. Wanneer de sensor wordt ingedrukt, vervormt de zachte silicone en knijpt de kanalen samen, waardoor hun dwarsdoorsnede smaller wordt. Omdat het metaalpad strakker en langer wordt, neemt de elektrische weerstand op een voorspelbare manier toe. Door die verandering te meten, zet het apparaat fysieke kracht om in een elektrisch signaal. De auteurs tonen aan dat deze sensoren kunnen buigen, rekken en torsen terwijl ze blijven functioneren, waardoor ze goed geschikt zijn voor gebogen en bewegende oppervlakken zoals chirurgische instrumenten, zachte robots of draagbare apparaten.
Ontwerpkeuzes die de gevoeligheid afstemmen
Om verder te gaan dan eenvoudige demonstraties onderzocht het team systematisch hoe ontwerpdetails de prestaties beïnvloeden. Met computermodellen en tests op de werkbank varieerden ze de stijfheid van de silicone, de totale sensordikte, de diepte van het kanaal onder het oppervlak en de vorm en afmetingen van het kanaal. Zachtere silicone, dunnere apparaten en ondiepere kanalen maakten de sensor gevoeliger omdat ze meer vervorming mogelijk maakten bij dezelfde belasting. smallere kanalen versterkten het effect door de vervorming in een kleinere vloeistofbaan te concentreren. Van de verschillende dwarsdoorsnedevormen gaf een “omgekeerde trapvormige driehoek” — breed aan de bovenkant en in treden smaller naar beneden — de hoogste gevoeligheid, omdat die geometrie de knijping naar regio’s richt die de elektrische weerstand het sterkst veranderen.
Meerdere kanalen voor een ruimer tactiel gevoel
Voortbouwend op deze inzichten creëerden de onderzoekers sensoren met meer dan één intern kanaal om zowel lichte als sterke aanraking in hetzelfde compacte apparaat te dekken. In één uitvoering liggen twee spiraalvormige kanalen op verschillende dieptes: het ondiepe reageert sterk op kleine krachten, terwijl het diepere bij hogere belastingen lineair blijft. In enkelvoudige lagen plaatsen “bloemachtige” en “rekbandachtige” lay-outs twee kanalen naast elkaar met verschillende breedtes of dwarsdoorsneden. Eén kanaal is platter en makkelijker te vervormen, waardoor het hoge gevoeligheid biedt bij zachte aanraking, terwijl het andere nauwkeurigheid behoudt wanneer de krachten groter worden. 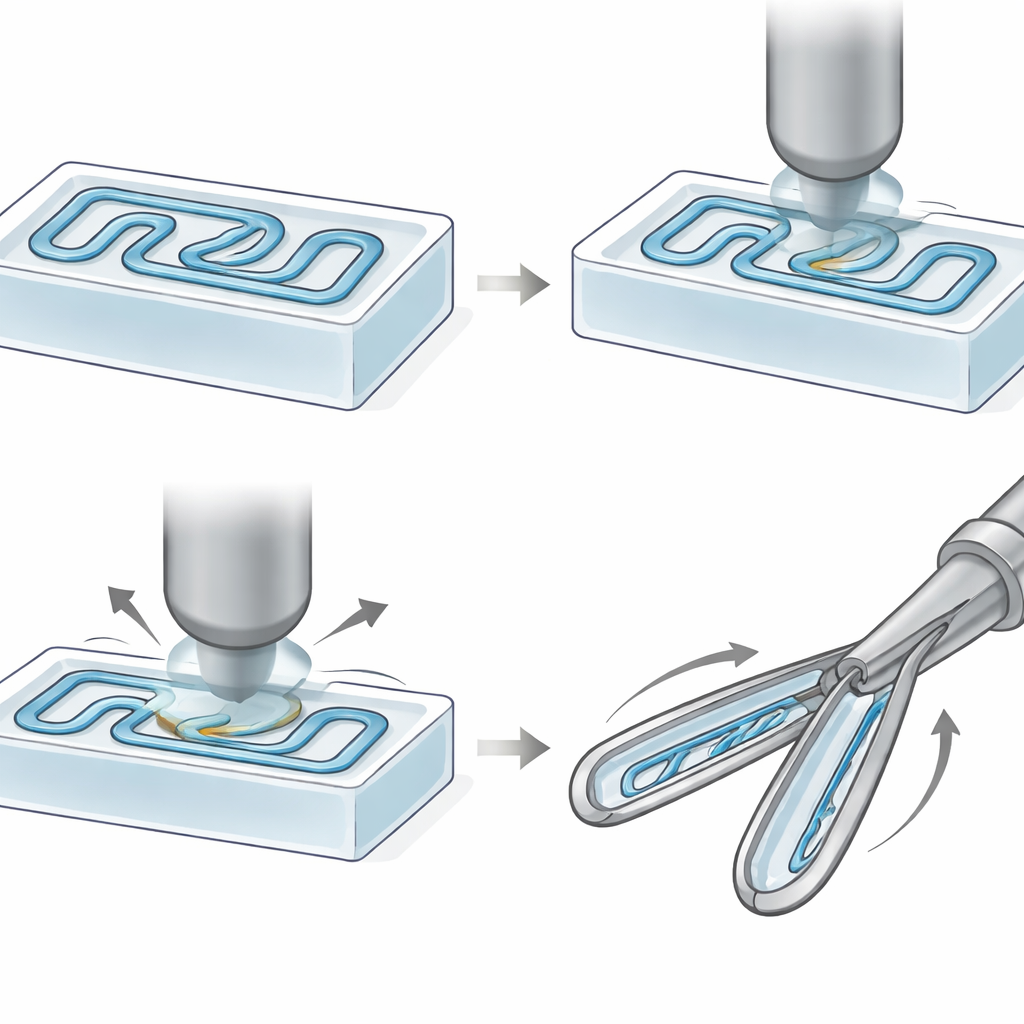
De aanraking terugbrengen naar laparoscopische instrumenten
Om praktische toepasbaarheid te demonstreren monteerde het team twee zachte sensoren op een standaard laparoscopische grasper. Een tandpatroon-sensor op één wang mat rechtstreeks de op weefselachtige silicone-monsters uitgeoefende kracht, terwijl een spiraalsensor op de duimring van het handvat vastlegde hoe hard de chirurg drukte om de kaken te sluiten. Omdat de sensoren zijn gemaakt van hetzelfde type zachte silicone als veel weefsel-fantomen, maken ze zachtere aanraking dan bloot metaal en passen ze zich goed aan gebogen vormen aan. Tests lieten repeteerbare signalen zien tijdens herhaalde pak‑en‑laat cycli en bevestigden dat de zachte kaken veel lagere spanningen op het modelweefsel veroorzaken dan een stijf metalen grijper. Samen kunnen de twee sensoren in real time een rijk beeld geven van zowel de handeling van de gebruiker als de interactie tussen instrument en weefsel.
Wat dit betekent voor toekomstige chirurgische tastzin
In eenvoudige bewoordingen laat dit werk zien dat kleine, met vloeistof gevulde “zenuwen” in chirurgische instrumenten ingebouwd kunnen worden om te voelen hoe hard ze klemmen. Omdat de apparaten zacht, goedkoop en vervaardigbaar zijn met gangbare 3D‑print- en gietmethoden, kunnen ze worden afgestemd op verschillende instrumenten, krachtsbereiken en zelfs op wegwerptoepassingen. De auteurs concluderen dat deze meerkanaals microfluïdische sensoren een realistisch traject vormen naar slimere instrumenten die tactiele feedback in minimaal invasieve chirurgie herstellen en die ook aangepast kunnen worden voor zachte robots en mens‑machine‑interfaces waar veilige, zachte aanraking essentieel is.
Bronvermelding: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Trefwoorden: zachte microfluïdische krachtsensor, laparoscopische grasper, vloeibaar metaal microkanaal, tactiele feedback, minimaal invasieve chirurgie