Clear Sky Science · pt
Sensores de força microfluídicos macios multicanais: projeto, caracterização e aplicação em laparoscopia
Por que sentir através das ferramentas cirúrgicas é importante
Quando um cirurgião opera por meio de pequenas incisões, suas mãos ficam separadas dos tecidos do paciente por instrumentos longos e rígidos. Grande parte da sensação natural de “toque” se perde, tornando mais difícil avaliar com que firmeza estão segurando ou comprimindo órgãos delicados. Este trabalho apresenta uma nova classe de sensores macios preenchidos com fluido que podem ser integrados diretamente em ferramentas laparoscópicas, com o objetivo de devolver aos cirurgiões uma sensação tátil confiável — sem acrescentar componentes volumosos ou eletrônica complexa. 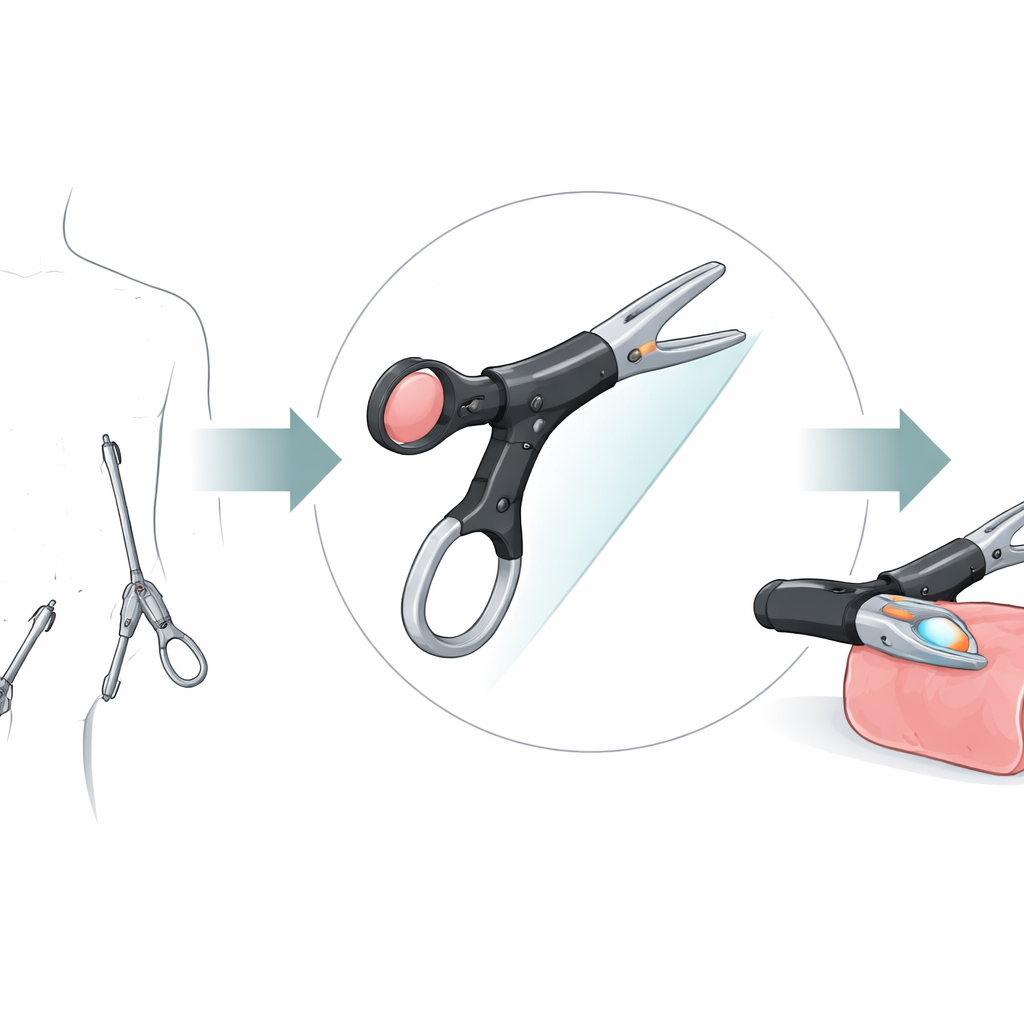
Sensores macios que se comportam como pele artificial
Os sensores são feitos de um silicone elástico (PDMS) que envolve microcanais tão finos quanto um fio, preenchidos com uma liga de metal líquido. Quando o sensor é pressionado, o silicone macio se deforma e aperta os canais, reduzindo sua seção transversal. Como o caminho do metal fica mais estreito e mais longo, sua resistência elétrica aumenta de forma previsível. Ao medir essa variação, o dispositivo converte força física em um sinal elétrico. Os autores mostram que esses sensores podem dobrar, esticar e torcer mantendo a funcionalidade, o que os torna bem adequados para superfícies curvas e em movimento, como ferramentas cirúrgicas, robôs macios ou dispositivos vestíveis.
Escolhas de projeto que ajustam a sensibilidade
Para ir além de demonstrações simples, a equipe explorou sistematicamente como detalhes de projeto afetam o desempenho. Usando simulações computacionais e testes em bancada, variaram a rigidez do silicone, a espessura geral do sensor, a profundidade do canal abaixo da superfície e a forma e o tamanho do canal. Silicones mais macios, dispositivos mais finos e canais mais rasos tornaram o sensor mais responsivo porque permitem maior deformação para a mesma carga aplicada. Canais mais estreitos também amplificaram o efeito, concentrando a deformação em um caminho de fluido menor. Entre várias formas de seção transversal, um canal em “triângulo escalonado invertido” — largo na parte superior e estreitando em degraus abaixo — ofereceu a maior sensibilidade, porque sua geometria concentra a compressão em regiões que alteram com mais intensidade a resistência elétrica.
Muitos canais para uma percepção tátil mais ampla
Com base nesses insights, os pesquisadores criaram sensores com mais de um canal interno para cobrir tanto toques leves quanto fortes no mesmo dispositivo compacto. Em uma versão, dois canais em espiral ficam a diferentes profundidades: o raso reage fortemente a forças pequenas, enquanto o mais profundo mantém linearidade em cargas maiores. Em projetos de camada única, arranjos “em flor” e “semelhantes a strain gauge” posicionam dois canais lado a lado com larguras ou seções transversais diferentes. Um canal é mais achatado e mais facilmente deformável, fornecendo alta sensibilidade ao contato suave, enquanto o outro mantém precisão quando as forças aumentam. 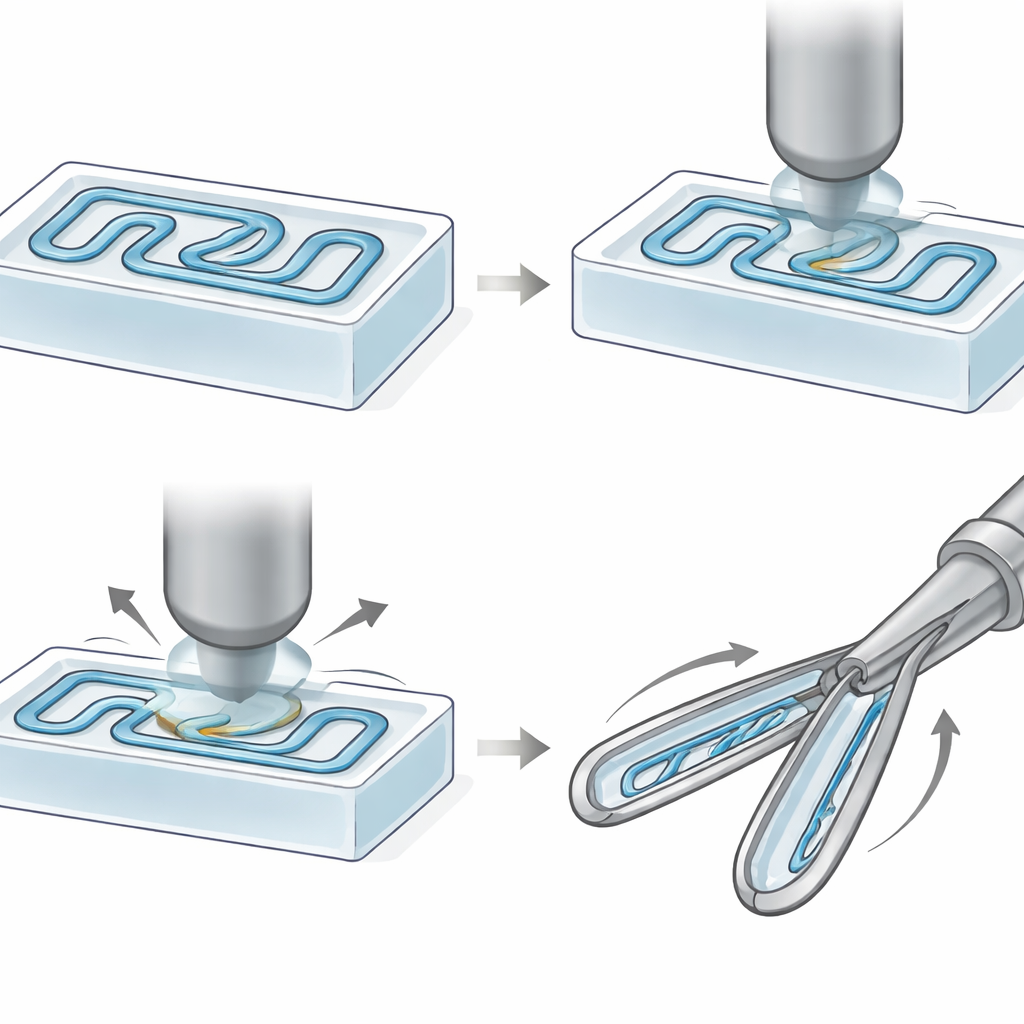
Devolvendo o toque às ferramentas laparoscópicas
Para demonstrar uso prático, a equipe montou dois sensores macios em uma pinça laparoscópica padrão. Um sensor com padrão dentado em uma das mandíbulas mediu diretamente a força aplicada a amostras de silicone que simulam tecido, enquanto um sensor em espiral no anel do polegar da alça capturou com que força o cirurgião pressionava para fechar as mandíbulas. Como os sensores são feitos do mesmo tipo de silicone macio de muitos fantoches de tecido, eles entram em contato com superfícies de forma mais gentil que o metal nu e se conformam bem às curvas. Os testes mostraram sinais repetíveis durante ciclos repetidos de apreensão e liberação e confirmaram que as mandíbulas macias geram tensões muito menores sobre o tecido-modelo do que uma pinça metálica rígida. Em conjunto, os dois sensores podem fornecer uma visão abrangente tanto da ação da mão quanto da interação ferramenta‑tecido em tempo real.
O que isso significa para o toque cirúrgico no futuro
Em termos simples, este trabalho mostra que “nervos” minúsculos preenchidos com fluido podem ser incorporados em ferramentas cirúrgicas para detectar com que força estão comprimindo. Como os dispositivos são macios, baratos e fabricados com métodos comuns de impressão 3D e moldagem, eles podem ser adaptados a diferentes ferramentas, faixas de força e até para uso descartável. Os autores concluem que esses sensores microfluídicos multicanais são um caminho realista rumo a instrumentos mais inteligentes que restauram o feedback tátil em cirurgia minimamente invasiva e também podem ser adaptados para robôs macios e interfaces humano‑máquina onde o toque seguro e delicado é essencial.
Citação: Othman, W., Qasaimeh, M.A. Multichannel soft microfluidic force sensors: design, characterization, and application in laparoscopy. Microsyst Nanoeng 12, 138 (2026). https://doi.org/10.1038/s41378-026-01263-8
Palavras-chave: sensor microfluídico macio, pinça laparoscópica, microcanal de metal líquido, feedback tátil, cirurgia minimamente invasiva