Clear Sky Science · tr
Optİmal kontrolde güvenli pekiştirmeli öğrenme için Kendiliğinden Düzenlenen Çift-Bellekli Uyarlanabilir Kümeleme Deneyim Tekrarı (SODACER)
Makinelere Güvenli Öğrenmeyi Öğretmek
Bilgisayarlar tıbbi tedaviler veya robotlar gibi gerçek dünya sistemlerini kontrol etmeyi öğrenirken, insanların risk altında kalmamasını sağlayacak şekilde hızla gelişmeleri gerekir. Bu makale, öğrenme algoritmalarının geçmiş deneyimler üzerinde pratik yapma yöntemine yeni bir yaklaşım getiriyor; böylece algoritmalar hem daha hızlı hem de daha güvenli oluyor ve İnsan Papilloma Virüsü (HPV) yayılımı ve maliyetini sınırlamak için daha iyi stratejiler tasarlamaya nasıl yardımcı olabileceğini gösteriyor.
Karmaşık Sistemleri Kontrol Etmenin Zorluğu
Modern teknolojiler, hastalık yayılımından robot hareketine kadar sürekli değişen sistemleri kapsar. Mühendisler, güvenlik kuralları veya kaynak kısıtları gibi sıkı sınırlara uyarken bu sistemleri sağlıklı veya verimli durumlara yönlendirmek ister. Geleneksel kontrol yöntemleri, sistem yüksek düzeyde karmaşık, belirsiz veya zamanla değişken olduğunda zorlanabilir. Yapay bir ajanın deneme yanılma yoluyla öğrendiği pekiştirmeli öğrenme bu bağlamda cazip olsa da, öğrenme sürecinin kendisinin güvensiz bölgelere sapmaması için dikkatle tasarlanmalıdır.
Güvenliği Unutmadan Bellekten Öğrenmek
Birçok başarılı öğrenme sisteminin temel bileşenlerinden biri, algoritmanın geçmiş etkileşimleri saklayıp bunları kararlarını iyileştirmek için yeniden kullandığı deneyim tekrarı adı verilen bir hafızadır. Temel tekrar stratejileri bu bellekten rastgele örnekler çeker; dünyanın değiştiği durumlarda bu israflı ve kararsız olabilir. Yazarlar, Kendiliğinden Düzenlenen Çift-Bellekli Uyarlanabilir Kümeleme Deneyim Tekrarı (SODACER) adlı yeni bir tekrar çerçevesi öneriyor. Tek bir homojen bellek tutmak yerine SODACER, çok yeni deneyimler için hızlı bir arabelleğe ve daha eski deneyimleri kümelere ayırıp fazla olanları otomatik olarak budayan, çeşitliliği korurken yer tasarrufu sağlayan yavaş bir arabelleğe ayırıyor. 
İki Bellekli Hafıza Nasıl Öğrenir
SODACER'de hızlı arabellek sistemin ve öğrenen ajanın en son davranışını yakalar. Bu taze örnekler mevcut durum hakkında güçlü bilgiler içerir, bu yüzden gürültülü olsalar bile ajanın hızlıca uyum sağlamasına yardımcı olur. Zamanla seçilen deneyimler yavaş arabelleğe geçirilir; burada kendiliğinden düzenlenen bir kümeleme mekanizması benzer durumları bir araya getirir. İki küme güçlü biçimde örtüşürse birleştirilir ve çok dar veya bilgi verici olmayan kümeler çıkarılır. Bu, yavaş arabelleği kompakt ama zengin tutar, sistemin farklı koşullar altındaki davranışına geniş bir bakış sunar. Öğrenme algoritması her iki arabellekten de örnekler çeker, kısa vadeli esneklik ile uzun vadeli kararlılık arasında denge kurar ve istatistiksel öğrenmede yaygın olan önyargı ile varyans arasındaki çekişmeyi azaltır.
Öğrenmeyi Güvenli Sınırlarda Tutmak
Yüksek kaliteli kontrol stratejileri öğrenmenin ötesinde, çerçevenin sistemin asla güvenlik sınırlarını ihlal etmemesini sağlaması gerekir. Bunu başarmak için yazarlar SODACER'i kontrol bariyer fonksiyonlarına dayalı bir güvenlik katmanıyla birleştirir. Basitçe söylemek gerekirse, pekiştirmeli öğrenme politikası bir kontrol eylemi önerir ve bir güvenlik filtresi bu eylemin sistemi önceden tanımlanmış güvenli bölgenin dışına itip itmeyeceğini kontrol eder. Gerekirse filtre, tüm güvenlik koşulları sağlanacak şekilde eylemi asgari düzeyde ayarlar. Bu tasarım, bariyer fonksiyonları her adımda güvenliği sağlarken öğrenen ajanın performansı (örneğin hastalık yükünü veya maliyeti azaltmayı) iyileştirmeye odaklanmasına izin verir.
Yöntemi HPV Kontrolünde Test Etmek
Yaklaşımı göstermek için araştırmacılar SODACER'i erkekleri ve kadınları, aşılama, tarama ve bütçe kısıtlarını içeren ayrıntılı bir HPV bulaş modeli üzerine uyguluyor. Amaç, aşılama ve tarama oranlarıyla ilgili gerçekçi kısıtlamalara uyarak zaman içinde enfeksiyonları ve ilişkili maliyetleri azaltmaktır. Yöntemlerini basit rastgele tekrar ve standart kümeleme tabanlı tekrar olmak üzere iki diğer tekrar stratejisiyle karşılaştırırlar. Beş farklı müdahale senaryosu ve 200 tekrarlı simülasyon boyunca, SODACER Sophia adındaki verimli bir optimize edici ile eşleştirildiğinde daha hızlı yakınsıyor, daha az örnek kullanıyor ve daha düşük nihai maliyet elde ediyor. Ayrıca çalışma runslar arasındaki değişkenliği azaltıyor, bu da daha güvenilir öğrenmeye işaret ediyor ve güvenlik katmanı sayesinde tüm test edilen durumlarda kısıt ihlali oranını sıfırda tutuyor. 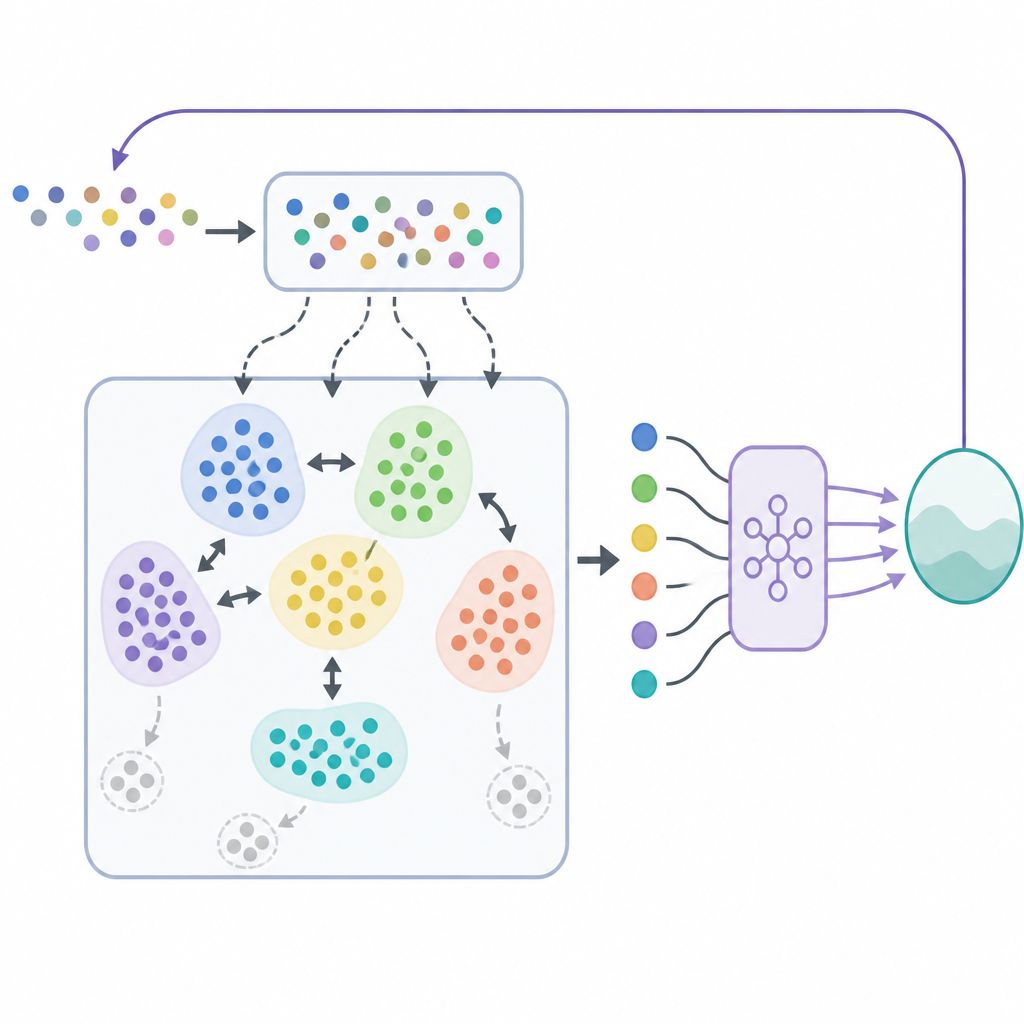
Gerçek Dünya Kontrolü İçin Anlamı
Düz bir ifadeyle, bu çalışma bir öğrenme algoritmasına daha akıllı bir hafıza ve sürekli açık bir güvenlik kalkanı vererek hem etkili hem de güvenilir kontrol stratejileri üretebileceğini gösteriyor. Körü körüne keşfetmek yerine sistem en bilgilendirici deneyimleri seçici olarak hatırlıyor ve önerilen her eylemi net güvenlik sınırlarına karşı kontrol ediyor. Vaka çalışması HPV üzerine odaklansa da, SODACER ve güvenlik entegrasyonunun arkasındaki fikirler genel nitelikte olup robotik, sağlık hizmetleri ve büyük altyapı sistemleri gibi çeşitli alanlarda daha güvenli, daha verimli öğrenmeye dayalı kontrolü işaret ediyor.
Atıf: Khalili-Amirabadi, R., Jalaeian-Farimani, M. & Solaymani-Fard, O. Self-Organizing Dual-Buffer Adaptive Clustering Experience Replay (SODACER) for safe reinforcement learning in optimal control. Sci Rep 16, 14960 (2026). https://doi.org/10.1038/s41598-026-44517-1
Anahtar kelimeler: güvenli pekiştirmeli öğrenme, deneyim tekrarı, çift-bellekli hafıza, HPV kontrolü, optimal kontrol