Clear Sky Science · ru
Самоорганизующаяся адаптивная кластерная реплей-система с двумя буферами (SODACER) для безопасного обучения с подкреплением в задачах оптимального управления
Обучение машин безопасно
Когда компьютеры учатся управлять реальными системами — например, лечебными протоколами или роботами — нужно, чтобы они улучшали свои решения быстро, но не подвергали людей риску. В этой работе представлен новый способ, позволяющий алгоритмам практиковаться на прошлом опыте так, чтобы они становились одновременно быстрее и безопаснее, и показано, как это помогает вырабатывать лучшие стратегии по снижению распространения и затрат, связанных с вирусом папилломы человека (ВПЧ).
Почему управление сложными системами трудно
Современные технологии часто включают системы, которые непрерывно меняются во времени: от распространения болезней в популяции до движения робота. Инженеры стремятся направлять такие системы к здоровым или эффективным состояниям, соблюдая жёсткие ограничения — правила безопасности или лимиты ресурсов. Классические методы управления испытывают трудности, когда система высоко сложна, неопределённа или изменчива. Обучение с подкреплением, где агент учится методом проб и ошибок, выглядит привлекательно, но его нужно проектировать так, чтобы сам процесс обучения не выходил за безопасные границы.
Учиться по памяти, не забывая о безопасности
Ключевой компонент многих успешных систем обучения — так называемый experience replay (повтор использования опыта): алгоритм сохраняет прошлые взаимодействия и повторно использует их для улучшения решений. Простые стратегии реплея берут случайные образцы из памяти, что при изменяющемся мире может быть неэффективно и нестабильно. Авторы предлагают новую рамочную систему реплея — Self-Organizing Dual-Buffer Adaptive Clustering Experience Replay, или SODACER. Вместо единой неразличаемой памяти SODACER разделяет её на быстрый буфер для очень недавних событий и медленный буфер, который организует старые события в кластеры, автоматически удаляя избыточные элементы, чтобы экономить место и в то же время сохранять разнообразие. 
Как учится память с двумя буферами
В SODACER быстрый буфер фиксирует последние поведения системы и агента. Эти свежие образцы несут сильную информацию о текущей ситуации и помогают агенту быстро адаптироваться, даже если они шумные. Со временем отобранные переживания перемещаются в медленный буфер, где механизм самоорганизующейся кластеризации группирует похожие ситуации. Когда два кластера сильно перекрываются, они сливаются; кластеры, ставшие слишком узкими или малоинформативными, удаляются. Это держит медленный буфер компактным, но богатым содержанием, предлагая широкий обзор того, как система ведёт себя в различных условиях. Алгоритм обучения выбирает данные из обоих буферов, балансируя краткосрочную гибкость и долгосрочную стабильность и уменьшая привычное противоборство смещения и разброса в статистическом обучении.
Поддержание обучения в безопасных пределах
Помимо выработки качественных стратегий управления, система должна гарантировать, что границы безопасности никогда не нарушаются. Для этого авторы совместили SODACER со слоем безопасности на основе функций барьера управления (control barrier functions). Проще говоря, политика обучения с подкреплением предлагает управляющее действие, а фильтр безопасности проверяет, не выведет ли оно систему за заранее определённую безопасную область. При необходимости фильтр минимально корректирует действие так, чтобы все условия безопасности оставались выполненными. Такая архитектура позволяет агенту сосредоточиться на повышении эффективности — например, снижении нагрузки заболевания или затрат — в то время как барьерные функции обеспечивают безопасность на каждом шаге.
Тестирование метода на управлении ВПЧ
Чтобы продемонстрировать подход, исследователи применили SODACER к детализированной модели передачи ВПЧ, включающей мужчин и женщин, вакцинацию, скрининг и бюджетные ограничения. Цель — со временем уменьшить число инфекций и связанные с ними затраты при соблюдении реалистичных ограничений по уровням вакцинации и скрининга. Они сравнили свой метод с двумя другими стратегиями реплея: простым случайным реплеем и стандартным реплеем на основе кластеризации. В пяти сценариях вмешательств и при 200 повторных симуляциях SODACER в паре с эффективным оптимизатором Sophia сходится быстрее, использует меньше образцов и достигает более низкой конечной стоимости. Также наблюдается меньшая изменчивость между прогоном — признак более надёжного обучения — и благодаря слою безопасности во всех протестированных случаях сохраняется нулевой уровень нарушений ограничений. 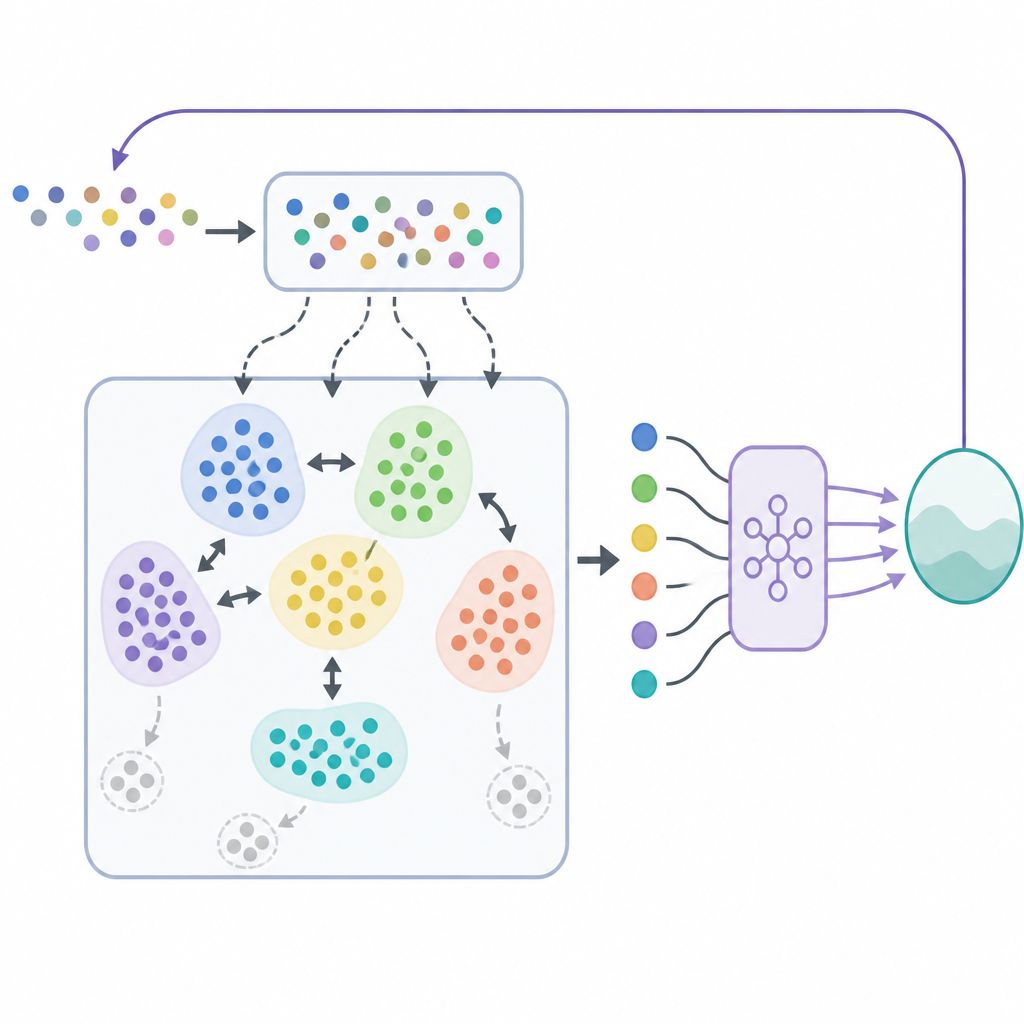
Что это значит для управления в реальном мире
Проще говоря, работа показывает, как сочетание у алгоритма более «умной» памяти и постоянно действующего щита безопасности может дать стратегии управления, одновременно эффективные и заслуживающие доверия. Вместо слепого исследования система выборочно запоминает наиболее информативные переживания и проверяет каждое предложенное действие на соответствие явным границам безопасности. Хотя практическое исследование сконцентрировано на ВПЧ, идеи SODACER и его интеграция с механизмом безопасности универсальны и указывают на путь к более безопасному и эффективному управлению на основе обучения в таких областях, как робототехника, здравоохранение и крупные инфраструктурные системы.
Цитирование: Khalili-Amirabadi, R., Jalaeian-Farimani, M. & Solaymani-Fard, O. Self-Organizing Dual-Buffer Adaptive Clustering Experience Replay (SODACER) for safe reinforcement learning in optimal control. Sci Rep 16, 14960 (2026). https://doi.org/10.1038/s41598-026-44517-1
Ключевые слова: безопасное обучение с подкреплением, experience replay, память с двумя буферами, контроль ВПЧ, оптимальное управление