Clear Sky Science · ja
最適制御における安全な強化学習のための自己組織化二重バッファ適応クラスタリング経験リプレイ(SODACER)
機械に安全な学習を教える
コンピュータが医療処置やロボットなど現実世界のシステムを制御するよう学習するとき、改善を速める一方で人々を危険にさらさないことが必要です。本論文は、学習アルゴリズムが過去の経験で効率よく練習する新しい手法を紹介し、それがより迅速で安全な学習を実現する様子を示すとともに、ヒトパピローマウイルス(HPV)の拡散と費用を抑える戦略設計への応用を示しています。
複雑なシステムを制御する難しさ
現代の技術は、集団における疾患の拡散からロボットの運動に至るまで、時間とともに連続的に変化するシステムを含むことが多いです。エンジニアは、安全規則や資源制約のような厳しい限界を守りながら、これらのシステムを健全または効率的な状態へと導きたいと考えます。従来の制御手法は、システムが高度に複雑で不確実性が大きい、あるいは時間とともに変化する場合に苦戦することがあります。試行錯誤で学ぶ強化学習は有望ですが、学習過程自体が安全でない領域に踏み込まないよう慎重に設計する必要があります。
安全性を忘れずに記憶から学ぶ
多くの成功した学習システムで重要な要素となっているのが経験リプレイというメモリの仕組みで、アルゴリズムは過去の相互作用を保存して再利用することで意思決定を改善します。基本的なリプレイ戦略はこのメモリからランダムにサンプルを引くため、世界が変動する状況では非効率で不安定になり得ます。著者らは、Self-Organizing Dual-Buffer Adaptive Clustering Experience Replay(SODACER)と名付けた新しいリプレイの枠組みを提案します。ひとつの大きな均質なメモリを保持する代わりに、SODACERは非常に最近の経験を格納する高速バッファと、古い経験をクラスタに整理する低速バッファに分割します。冗長なものは自動的に刈り取られ、空間を節約しつつ多様性を保ちます。
二重バッファメモリの学び方
SODACERでは、高速バッファがシステムと学習エージェントの最新の振る舞いを捉えます。これらの新鮮なサンプルは現在の状況について有力な情報を含むため、ノイズがあってもエージェントの迅速な調整に寄与します。時間とともに、選ばれた経験は低速バッファへ移され、自己組織化クラスタリング機構が類似した状況をまとめます。二つのクラスタが強く重なると統合され、狭すぎるか情報量の少ないクラスタは除去されます。これにより低速バッファはコンパクトでありながら豊富な情報を保持し、さまざまな条件下でのシステム挙動を幅広く表現します。学習アルゴリズムは両方のバッファからサンプルを引き、短期的な柔軟性と長期的な安定性のバランスを取り、統計的学習における偏りと分散の綱引きを軽減します。
学習を安全な範囲内に保つ
高品質な制御戦略を学ぶことに加え、フレームワークはシステムが安全限界を越えないことを保証しなければなりません。そのために著者らは、制御バリア関数に基づく安全層とSODACERを組み合わせます。簡単に言えば、強化学習ポリシーが制御アクションを提案し、安全フィルタがそのアクションが事前定義された安全領域を逸脱する可能性があるかを検査します。必要に応じてフィルタはアクションを最小限に修正し、すべての安全条件が満たされるようにします。この設計により、学習エージェントは疾病負担やコスト削減など性能の改善に集中できる一方で、バリア関数が各ステップで安全を担保します。
HPV制御での手法の検証
アプローチの実証のため、研究者らは男女、ワクチン接種、スクリーニング、予算制約を含む詳細なHPV伝播モデルにSODACERを適用しました。目的は、ワクチン接種やスクリーニング率に関する現実的な制約を守りながら、時間とともに感染と関連費用を減らすことです。彼らは本手法を単純なランダムリプレイと標準的なクラスタベースのリプレイという二つの他の戦略と比較しました。五つの異なる介入シナリオと200回の繰り返しシミュレーションにわたって、SODACERはSophiaと呼ばれる効率的な最適化器と組み合わせることで収束が速く、サンプルを少なく使い、最終的なコストを低く達成しました。また、試行間の変動が小さく信頼性の高い学習を示し、安全層のおかげで全ての試験ケースで制約違反率はゼロに保たれました。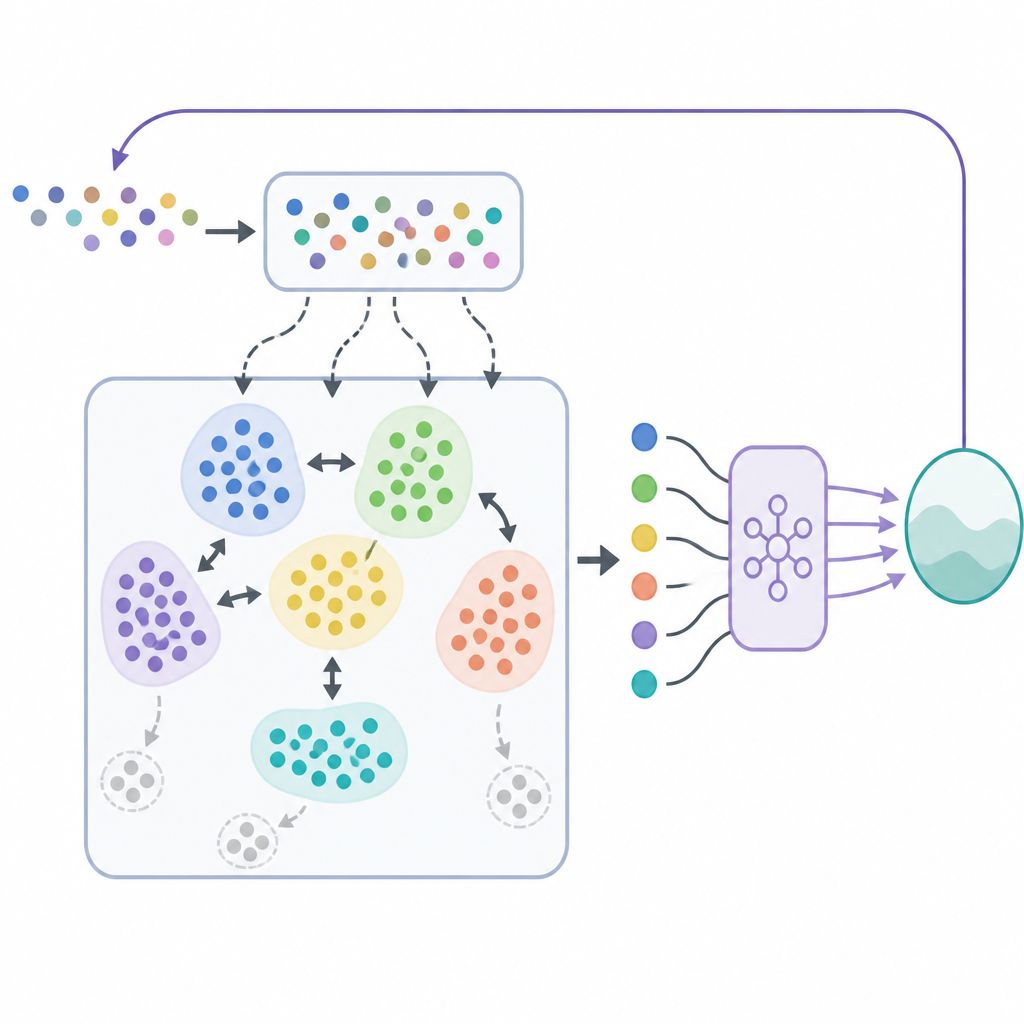
現実世界の制御にとっての意義
平たく言えば、本研究は学習アルゴリズムにより賢い記憶と常時作動する安全シールドを与えることで、有効で信頼できる制御戦略が得られることを示しています。盲目的に探索するのではなく、システムは最も情報量の多い経験を選択的に記憶し、提案された各アクションを明確な安全境界と照らして検査します。事例研究はHPVに焦点を当てていますが、SODACERとその安全統合の背後にある考え方は汎用的であり、ロボティクス、ヘルスケア、大規模インフラなど多様な分野における、より安全で効率的な学習ベースの制御へとつながる可能性があります。
引用: Khalili-Amirabadi, R., Jalaeian-Farimani, M. & Solaymani-Fard, O. Self-Organizing Dual-Buffer Adaptive Clustering Experience Replay (SODACER) for safe reinforcement learning in optimal control. Sci Rep 16, 14960 (2026). https://doi.org/10.1038/s41598-026-44517-1
キーワード: 安全な強化学習, 経験リプレイ, 二重バッファメモリ, HPV制御, 最適制御