Clear Sky Science · tr
SV-TransFusion: Seyrek Voksellik–Sorgu Etkileşimi ile LiDAR 3B nesne tespiti
Yolu Üç Boyutta Görmek
Sürücüsüz arabalar etraflarındaki her şeyi—kamyon ve otobüslerden bisikletçilere ve yayalara kadar—her türlü hava ve trafik koşulunda tespit edip takip etmek zorunda. Birçok sistem, dünyayı üç boyutlu bir resme dönüştüren lazer tabanlı bir sensör olan LiDAR’a dayanıyor. Ancak mevcut algoritmaların çoğu bu zengin 3B bilgiyi işlemek için üstten tek bir düzleme sıkıştırıyor; bu matematiği kolaylaştırıyor fakat yükseklikle ilgili önemli ayrıntıları yok sayıyor. Bu makale, bilgisayarların eksik olan 3B yapıyı koruyup kullanmasına olanak tanıyan SV-TransFusion adlı yeni bir yöntemi tanıtıyor; bu da yoldaki nesnelerin daha güvenli ve güvenilir şekilde tespit edilmesini sağlıyor.
3B Veriyi Düzleştirmek Neden Riskli Olabilir
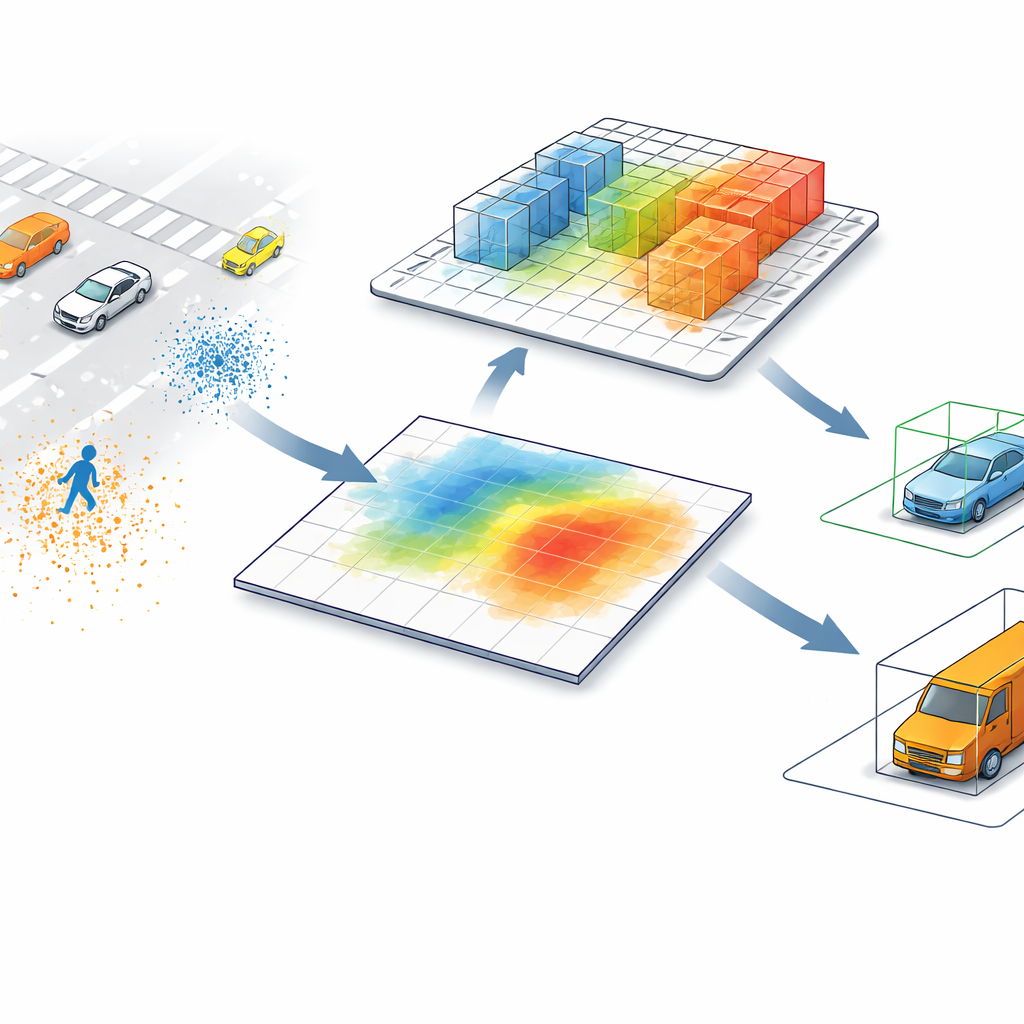
Günümüzün önde gelen LiDAR tespit sistemleri genellikle nokta bulutlarını—uzaya dağılmış milyonlarca mesafe ölçümünü—kuşbakışı bir görüntüye çevirir. Bu düz haritada her pikselin altında olan her şey özetlenir ve yükseklikleri büyük ölçüde farklı olabilecek nesneler birleştirilir. Uzun bir direğin yanındaki bir yaya veya bir kamyonun yakınındaki alçak bir engel, yalnızca yukarıdan bakıldığında neredeyse aynı görünebilir. Bu kestirme işlem hesaplamayı hızlandırsa da, karmaşık sahnelerde veya küçük ve uzun nesneler yol üzerinde aynı ayak izini paylaştığında kafa karışıklığına yol açar.
Bilgisayarın 3B'ye Geri Bakmasına İzin Vermek
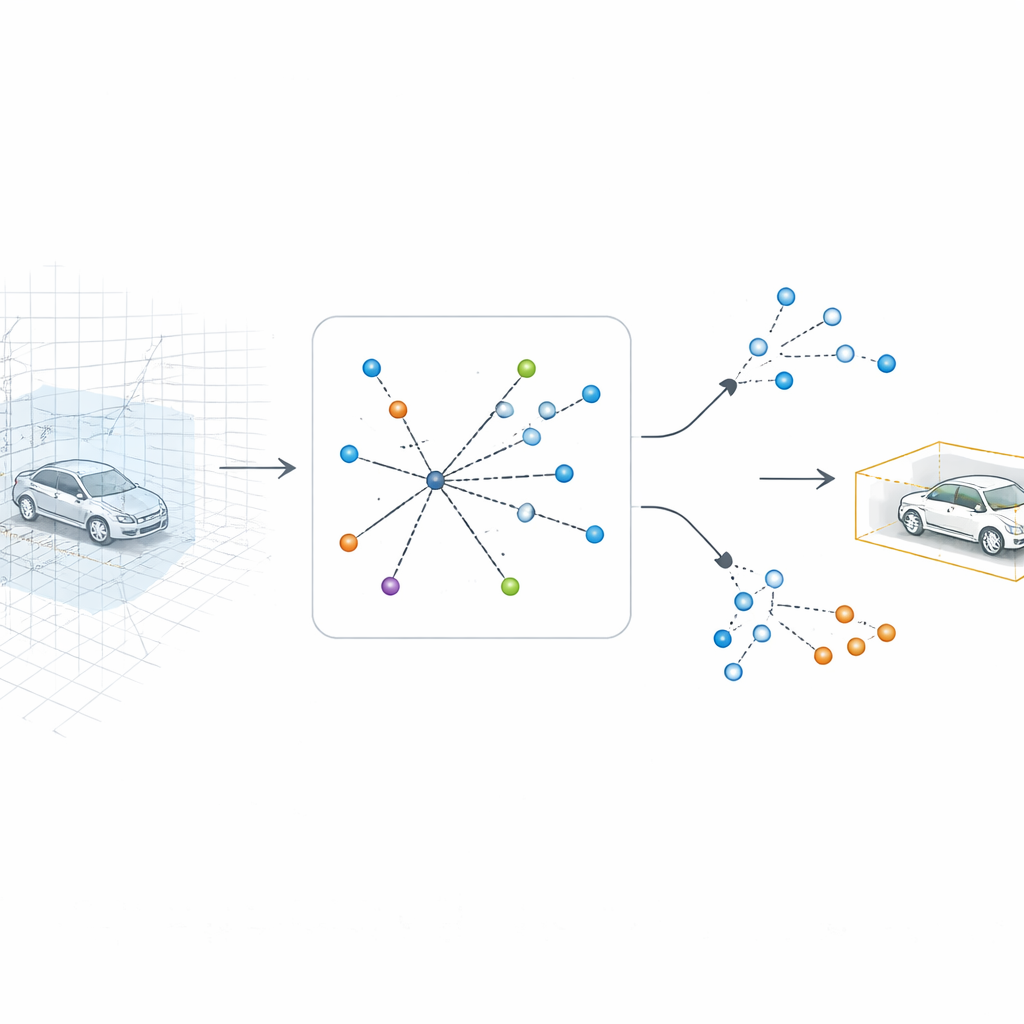
SV-TransFusion bu sorunu, tespit algoritmasından orijinal 3B yapıya doğrudan bir hattın yeniden açılmasıyla ele alır. İçsel “nesne sorguları”nın yalnızca düzleştirilmiş haritayı görmesine izin vermek yerine, sistem onların yakındaki 3B hacim hücrelerine veya voksellere seçici olarak erişmelerine imkan tanır; bu hücreler hâlâ ince yükseklik ve şekil bilgisini korur. Seyrek Voksellik–Sorgu Etkileşimi adlı özel bir modül, her geçici nesne konumu etrafında arama yapar ve yalnızca o mahalledeki dolu vokselleri toplar. Boş uzay yerine gerçek ölçülmüş noktalara odaklanarak model, aksi takdirde kaybolacak olan ince dikey ipuçlarını geri kazanır.
Gürültülü Örneklerle Daha Hızlı, Daha Net Öğrenme
Güncel görsel ve dil sistemlerinin arkasındaki sinir ağları olan transformerlar güçlüdür fakat tespit görevleri için eğitilmeleri genellikle yavaş ve kararsız olabilir. Yazarlar buna yönelik Query-based Contrastive Denoising adında bir eğitim şeması önerir. Eğitim sırasında ideal nesne ipuçlarına bilerek gürültü eklerler—araçları, yayaları veya bisikletleri işaretleyen kutuları hafifçe kaydırıp yeniden boyutlandırır—ve sonra modelden bu gürültülü tahminleri düzeltmesini isterler. Aynı zamanda, aynı tür nesne için içsel özelliklerin birbirine kümelenmesini teşvik ederken, farklı türleri birbirinden uzaklaştırırlar. Bu birleşim, düzleştirilmiş görünümde benzer görünselere sahip olsalar bile sistemin bir otobüsü bir kamyondan veya arka plan karışıklığından hızla ayırt etmeyi öğrenmesine yardımcı olur.
Gerçek Sokak Verileri Üzerinde Yararları Kanıtlamak
Ekip SV-TransFusion’ı karmaşık kentsel trafikli yaygın bir otonom sürüş veri seti olan nuScenes üzerinde test etti. Popüler TransFusion modeli de dahil güçlü mevcut yöntemlerle karşılaştırıldığında, SV-TransFusion nesneleri daha doğru tespit etti ve yön ve hareket tahminlerini daha güvenilir biçimde gerçekleştirdi; üstelik bunun için yalnızca makul düzeyde bir hesaplama artışı gerekiyordu. Kazançlar özellikle yayalar ve bisikletler gibi yükseklikten güçlü biçimde etkilenen küçük kategorilerde ve uzak veya kısmen gizlenmiş nesnelerde belirgindi—dikey ayrıntının kaybının en zararlı olduğu durumlar. Yöntem ayrıca farklı LiDAR omurgalarının bir dizi üzerinde iyileşme gösterdi; bu da mevcut birçok sisteme kolayca entegre edilebileceğini ortaya koyuyor.
Daha Güvenli Özerklik İçin Ne Anlama Geliyor
Basitçe söylemek gerekirse, SV-TransFusion sürücüsüz arabaların tekrar 3B “düşünmesine” izin veriyor, hızdan ödün vermeden. Tespit modüllerinin ham 3B ölçümlere geri erişmesine olanak tanıyarak ve onları gürültülü, karşıt öğrenmeli örneklerle eğiterek, yöntem yol sahnesinin daha keskin ve daha güvenilir bir anlayışını sunuyor. Bu, savunmasız yol kullanıcılarının daha iyi tanınması, benzer görünen araçların daha net ayrılması ve hareketin daha emin bir şekilde takibi anlamına geliyor—hepsi gerçek zamanlı güvenli otonom sürüş için kritik unsurlar.
Atıf: Shi, T. SV-TransFusion for LiDAR 3D object detection with Sparse Voxel–Query Interaction. Sci Rep 16, 13375 (2026). https://doi.org/10.1038/s41598-026-42093-y
Anahtar kelimeler: LiDAR 3B nesne tespiti, otonom sürüş, transformer modelleri, seyrek vokseller, kuşbakışı algılama