Clear Sky Science · tr
Sinirsel stilizasyon temelli örnek-tabanlı uçtan uca sim-to-real RL politika aktarımı ve robotik kesme uygulaması
Robotlara Gerçek Dünyada Nasıl Kesme Öğretilir
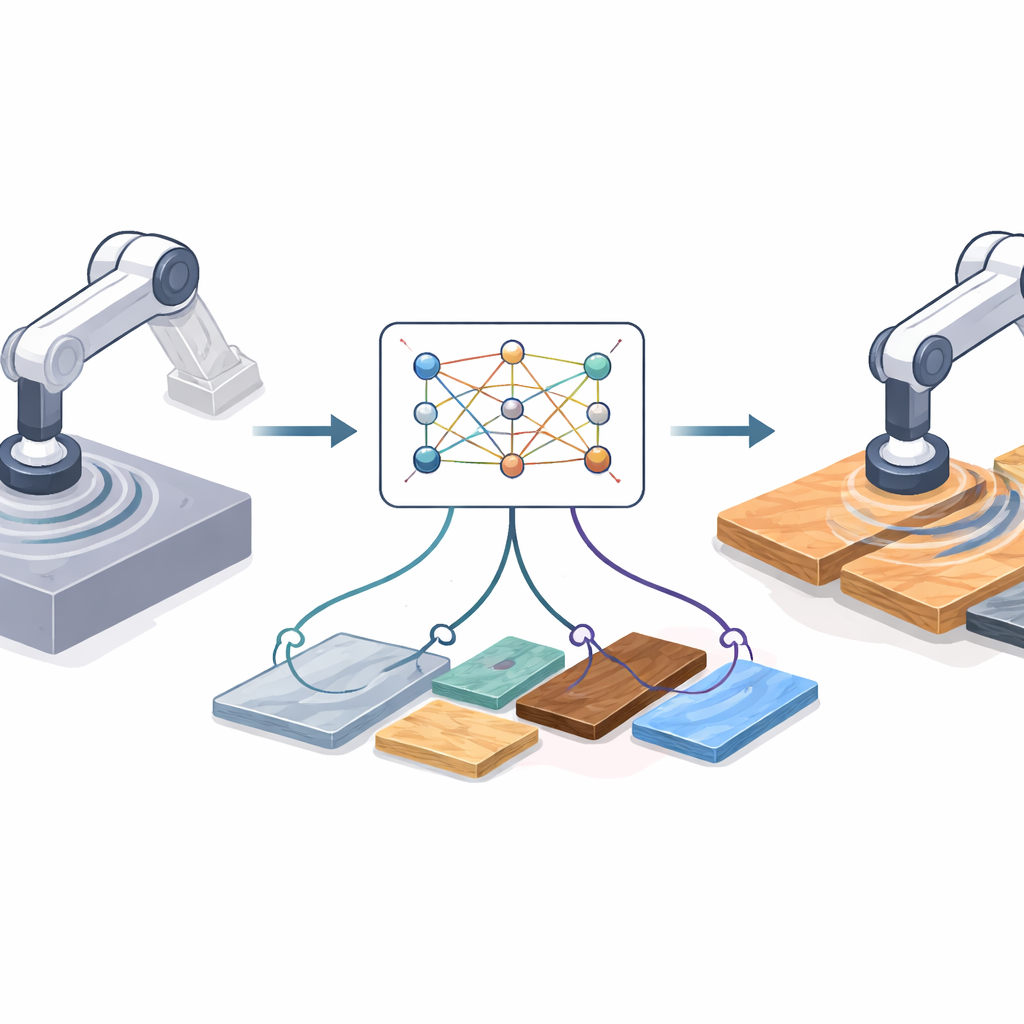
Robotlar bilgisayar simülasyonlarında karmaşık görevleri öğrenmede giderek daha iyi oluyor, ancak sürtünme, aşınma ve dağınık malzemeler gibi etkenler gerçek dünyaya geçirildiklerinde her şeyi daha öngörülemez hale getirdiği için sık sık zorlanıyorlar. Bu makale, simülasyonda güvenli ve verimli kesme öğrenmiş bir robotun, çok büyük miktarda yeni gerçek dünya verisine ihtiyaç duymadan bilinmeyen gerçek malzemelerde de bunu sürdürebilmesini sağlayacak yeni bir köprü kurma yolunu araştırıyor.
Ekrandan Atölyeye Geçmenin Zorluğu
Pekiştirmeli öğrenme, bir robotun deneme-yanılma yoluyla iyi stratejiler keşfetmesini sağlar, ancak gerçek dünya denemeleri yavaş, riskli ve maliyetli olabilir. Bunun yerine mühendisler genellikle simülasyonda eğitir; milyonlarca pratik deneme ucuz ve güvenlidir. Sorun şu ki, simülasyondaki kesme her zaman gerçeklikten daha temizdir. Laboratuvarda robotun aleti titreşim yapabilir, motorlarda boşluk olabilir, malzemeler değişkenlik gösterebilir ve sensörler sapabilir. Bu farklılıklar bir “alan boşluğu” yaratır: simülasyonda çok iyi görünen bir politika gerçek donanımda kötü veya tehlikeli sonuçlar verebilir. Mevcut çözümler ya yanlış olabilecek ayrıntılı fiziksel modellere dayanır ya da donanım, sensörler veya malzemeler değiştiğinde yeniden eğitilmesi gereken ağır derin öğrenme sistemlerine güvenmek zorunda kalır.
Sayısal Sanattan Alınan Bir Fikir
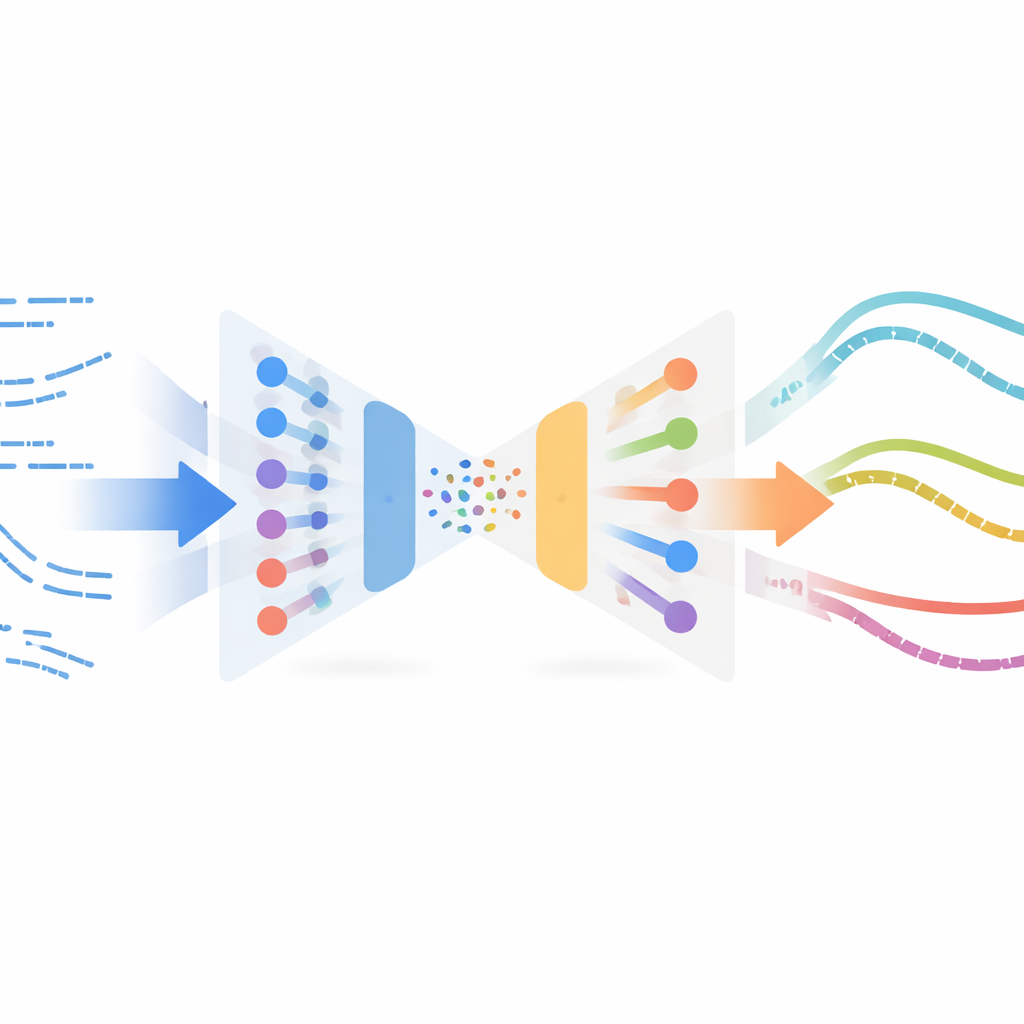
Yazarlar, görüntü işleme alanından şaşırtıcı bir kavramı, sinirsel stil transferini uyarlıyorlar. Görüntü uygulamalarında stil transferi bir görüntünün içeriğini (örneğin bir fotoğraf) başka bir görüntünün stiline (örneğin bir tabloya) uygulayıp yeni bir resim oluşturur. Burada resimler yerine “içerik” robotun zaman içindeki simüle edilmiş kesme davranışıdır ve “stil” gerçek kesmenin sensör verilerindeki görünümüdür. Yöntem, zaman serilerini sıkıştırıp yeniden oluşturabilen bir tür sinir ağı olan varyasyonel otoenkoder kullanarak kısa hareket parçalarının kompakt bir temsilini öğrenir. Bu ağ, gerçek deneylerden ödül veya etiket gerektirmeden robot durumlarını ve eylemlerini güvenilir şekilde kodlayıp dekode edebilsin diye önce yalnızca simüle edilmiş yörüngeler üzerinde eğitilir.
Simüle Edilmiş Deneyime Gerçek Dünya Hissi Katmak
Bu kodlayıcı eğitildikten sonra, sistem kullanılabilir tüm gerçek dünya kesme örneklerini—son, cilalı bir kontrolörden değil, off-policy olarak toplanmış olanları—aynı ağdan geçirir. Bu paylaşılan gizli uzayda, benzer “hissi” taşıyan simüle edilmiş ve gerçek parçacıklar birbirine yakınlaşır. Yöntem daha sonra benzerlik ölçütü kullanarak simüle edilmiş parçacıkları yakın gerçek parçacıklarla eşler ve bir stil-transfer optimizasyonu gerçekleştirir: her bir simüle parçacığı görev yapısını (örneğin robotun malzemeye ne zaman ve nasıl ilerlediğini) koruyacak şekilde hafifçe değiştirirken gerçek sensör okumalarının istatistiksel parmak izlerini almasını sağlar. Bu stillendirilmiş parçacıklar, simülasyon uzmanının eylemleriyle otomatik olarak etiketlenmiş bir vekil “gerçek” veri kümesi oluşturur ve taklit öğrenme yoluyla fiziksel robot için yeni bir politika eğitmek üzere kullanılır.
Yöntemi Teste Sokmak
Araştırmacılar yaklaşımlarını, motorlu zımba testeresiyle donatılmış bir iş birliği robotu üzerinde, köpük, karton, plastik, mika ve alüminyum gibi çeşitli malzemeleri keserek test ettiler. Robotun düz, hizalanmamış ve eğri yüzeyler üzerinde yolları takip etmesi, ilerleme hızını, kesme derinliğini ve sertliği ayarlaması gerekiyordu. Yeni stil-transfer tabanlı politika, simülasyonda eğitilmiş uzmanı doğrudan kullanma, el yapımı düzeltici model ekleyen önceki bir yöntem ve iki gelişmiş derin öğrenme çeviri şeması (koşullu varyasyonel otoenkoder ve CycleGAN) dahil olmak üzere birkaç alternatifle karşılaştırıldı. Vaka çalışmalarında stil-transfer politikası, ham simülasyon uzmanından ve GAN tabanlı yöntemden daha hızlı kesim yaptı ve daha karmaşık alternatiflere benzer veya daha iyi performans gösterirken kararlı davranış ve daha düzgün alet yolları korudu.
Gelecek Robotlar İçin Anlamı
Basitçe söylemek gerekirse, çalışma robotların yoğun yeniden eğitim veya hassas fiziksel modellere ihtiyaç duymadan gerçek dünya deneyiminin “hissini ödünç alabileceğini” gösteriyor. Simüle edilmiş beceriyi gerçek sensör verilerinin stiliyle harmanlayarak, robot gerçek dünyada doğrudan ödül geri bildirimi olmasa bile farklı malzemelere ve şekillere iyi aktarılabilen bir kesme stratejisi öğreniyor. Bu, sökme, geri dönüşüm veya hatta cerrahi gibi temasın yoğun ve hataların maliyetli olduğu görevlerde pekiştirmeli öğrenme tabanlı kontrolün uygulanmasını daha pratik hale getiriyor.
Atıf: Hathaway, J., Rastegarpanah, A. & Stolkin, R. End-to-end example-based sim-to-real RL policy transfer based on neural stylisation with application to robotic cutting. Sci Rep 16, 13240 (2026). https://doi.org/10.1038/s41598-026-41735-5
Anahtar kelimeler: sim-to-real aktarım, robotik kesme, pekiştirmeli öğrenme, sinirsel stil transferi, alan uyarlaması