Clear Sky Science · ja
ニューラルスタイライズに基づく例示的エンドツーエンドのシムツーリアルRL方策転移(ロボット切断への応用)
ロボットに実世界での切断を教える
ロボットはコンピュータシミュレーションで複雑な作業を学ぶのが上手になってきましたが、摩擦や摩耗、不均一な材料など現実の要素が入ると予測が難しくなり、実世界ではうまく動作しないことが多いです。本論文は、シミュレーションで安全かつ効率的に切断を学んだロボットが、大量の実世界データを必要とせずに未知の実物材料でも同様に動作できるようにする新しい橋渡し手法を示します。
画面から作業場へ移すのが難しい理由
強化学習は試行錯誤で良い戦略を見つけさせますが、実世界での試行は遅く、危険で高コストになりがちです。そこでエンジニアは多くの場合シミュレーションで学習させます。シミュレーションでは数百万回の練習が安価かつ安全に行えますが、問題はシミュレートされた切断が現実よりもいつも綺麗であることです。実験室では工具の震え、モータの遊び、材料のばらつき、センサのドリフトなどが生じます。これらの差異が「ドメインギャップ」を生み、シミュレーションで優れた方策が実機では性能を落としたり危険になったりします。既存の対処法は、詳細な物理モデル(誤差があることが多い)に頼るか、ハードウェアやセンサ、材料が変わるたびに再学習が必要な大規模な深層学習を使うかに分かれます。
デジタルアートから借りた発想
著者らは画像処理からの意外な発想、ニューラルスタイル転送を応用します。画像アプリでは、ある画像の内容(例えば写真)と別の画像のスタイル(例えば絵画)を組み合わせて新しい画像を作ります。本研究では画像の代わりに「内容」が時間に沿ったロボットのシミュレーション上の切断挙動であり、「スタイル」が実際のセンサデータに現れる切断の特徴です。手法は変分オートエンコーダという時系列を圧縮・再構成するニューラルネットワークで短い運動断片のコンパクトな表現を学習します。このネットワークはまずシミュレーション軌跡のみで訓練され、実験のラベルや実世界の報酬を必要とせずにロボットの状態と行動を安定して符号化・復元できるようになります。
シミュレーション体験に実世界の手触りを混ぜる
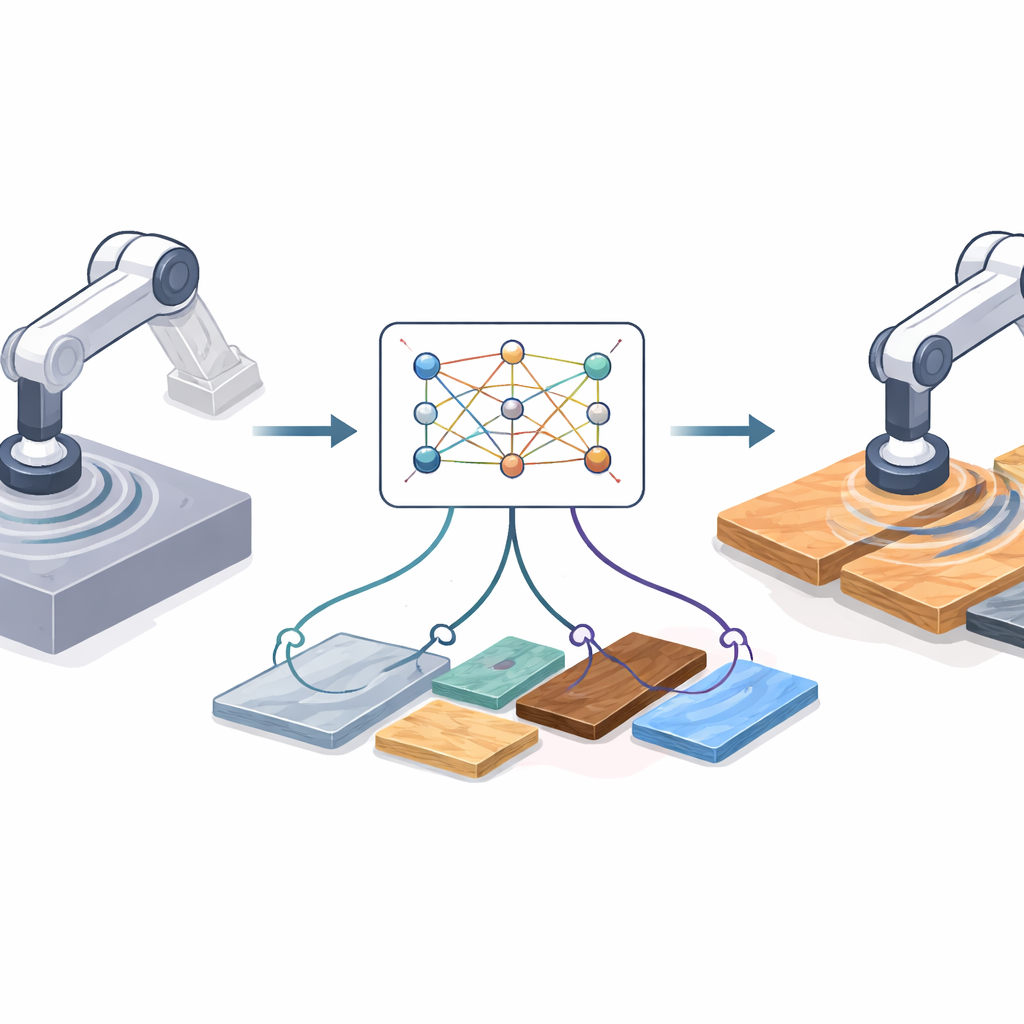
符号器が訓練されると、利用可能なすべての実世界切断例(最終的に洗練されたコントローラから取られたものではないオフポリシーデータ)を同じネットワークに通します。共有された潜在空間では、感覚的に似ているシミュレーション断片と実世界断片が近くに配置されます。手法は類似度に基づいてシミュレーション断片と近傍の実世界断片を組み合わせ、スタイル転送の最適化を行います:各シミュレーション断片の課題構造(例えばいつどのように材料に進入するか)は保ちつつ、実際のセンサ読み取りの統計的な指紋を取り込むように穏やかに修正します。こうして得られたスタイライズされた断片は、シミュレーションの専門家行動で自動的にラベル付けされた代替の“実データ”となり、模倣学習によって物理ロボット用の新しい方策を訓練するのに使われます。
手法の実証
研究者らは協働ロボットにモーター駆動のスリッティングソーを搭載した実機で手法を検証し、発泡体、段ボール、プラスチック、雲母、アルミニウムなど多様な材料を切断しました。ロボットは平面、ずれた面、曲面に沿った経路をたどりながら送り速度、切削深さ、剛性を調整する必要がありました。スタイル転送ベースの新方策は、シミュレーションで学習した専門家をそのまま使う方法、手作りの補正モデルを加えた従来法、条件付き変分オートエンコーダやCycleGANといった高度な深層翻訳スキームと比較されました。ケーススタディ全体で、スタイル転送方策は生のシミュレーション専門家やGANベース手法よりも高速に切断し、より複雑な代替手法と同等かそれ以上の性能を示しつつ、安定した挙動と滑らかな工具経路を維持しました。
将来のロボットにとっての意味
簡潔に言えば、この研究はロボットが大規模な再訓練や精密な物理モデルなしに実世界の「手触り」を借りられることを示しています。シミュレーションで得た技能に実際のセンサデータのスタイルを融合することで、実世界の報酬フィードバックが得られなくても、異なる材料や形状に対して良好に転移する切断戦略を学べます。これにより、解体、リサイクル、さらには実機での試行が制限されミスのコストが高い手術のような接触主体の課題に、強化学習ベースの制御を実用的に展開しやすくなります。
引用: Hathaway, J., Rastegarpanah, A. & Stolkin, R. End-to-end example-based sim-to-real RL policy transfer based on neural stylisation with application to robotic cutting. Sci Rep 16, 13240 (2026). https://doi.org/10.1038/s41598-026-41735-5
キーワード: シムツーリアル転移, ロボット切断, 強化学習, ニューラルスタイル転送, ドメイン適応