Clear Sky Science · tr
Karmaşık Ortamlarda Kızılötesi Gemi Hedef Tespiti Algoritması PEW_YOLOv8
Karanlıkta Gemileri İzlemek
Modern deniz yolları yoğun ve kalabalık; birçok gemi artık gece ve kötü hava koşullarında gözetim için kızılötesi kameralara güveniyor. Ancak bu bulanık ısı görüntülerini güvenilir uyarılara dönüştürmek göründüğü kadar kolay değil: uzaktaki tekneler küçük lekeler hâlinde olabilir, deniz sisi sahneyi bulanıklaştırır ve parlak ışıklar ya da dalgalar yazılımları yanıltabilir. Bu makale, görüşün bulanık veya karmaşık olduğu durumlarda kızılötesi videolarda gemileri daha doğru tespit etmek için tasarlanmış yeni bir bilgisayarlı görü yöntemi olan PEW_YOLOv8’i tanıtıyor.
Gemi Tespitinin Neden Bu Kadar Zor Olduğu
Kızılötesi gemi tespiti, nesneleri görünür ışık yerine ısı imzalarına dayanarak otomatik olarak bulmayı amaçlar. Bu, kızılötesi kameraların gece-gündüz ve sert koşullarda çalışabilmesi nedeniyle caziptir. Ancak ürettikleri görüntüler sıklıkla düşük ayrıntı ve kontrasta sahiptir. Nemli deniz havası sisi ve bulanıklığı artırarak gemilerin silik veya yıkanmış görünmesine neden olabilir. Küçük ve uzak tekneler yalnızca birkaç piksel kaplayabilir; bu yüzden standart algoritmalar bunları gözden kaçırır. Dalgalar, iskeleler veya şehir ışıkları arka planı karmaşıklaştırdığında, eski sistemler bu desenleri gerçek hedeflerle karıştırarak yanlış alarmlara veya tehditlerin tamamen kaçırılmasına yol açar.
Hızlı Görüntü Araçları Üzerine İnşa Etme
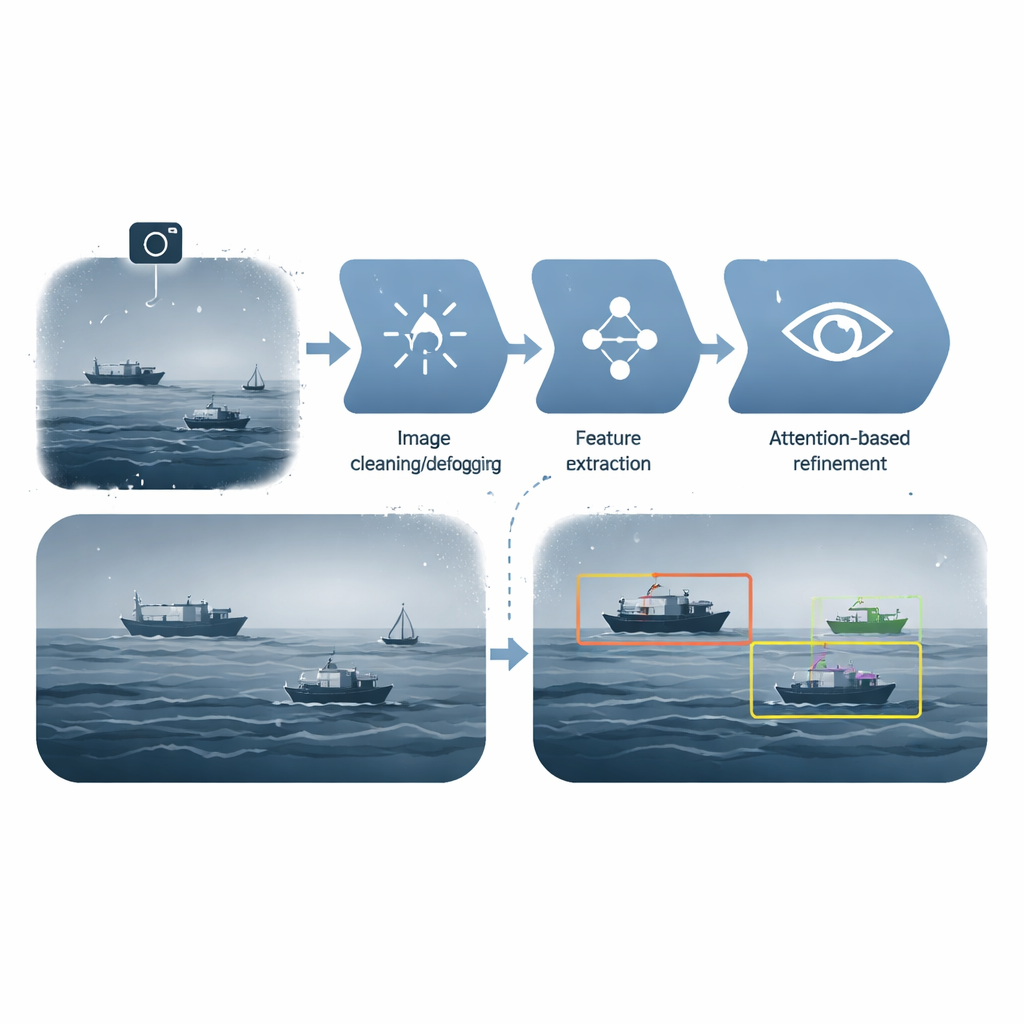
Yazarlar, gerçek zamanlı olarak birçok nesneyi tanıyabilen yaygın bir derin öğrenme sistemi olan YOLOv8’den yola çıkıyor. YOLOv8 hızlıdır, fakat ham kızılötesi gemi görüntülerinde hâlâ gürültülü sahnelerle, örtüşen hedeflerle ve küçük gemilerle zorlanıyor. Bunu ele almak için araştırmacılar birlikte PEW_YOLOv8’i oluşturan dört ana yükseltme sunuyor. Her yükseltme, orijinal boru hattının farklı bir zayıf noktasına odaklanıyor: giriş görüntüsünü temizlemek, daha zengin ayrıntılar çıkarmak, ölçekler arası bilgiyi akıllıca birleştirmek ve gemiler örtüştüğünde veya konturları belirsiz olduğunda tespit kutularını daha dikkatli biçimde değerlendirmek.
Görüşü Temizlemek ve İnce Ayrıntıları Bulmak
İlk yükseltme, FFA-Net adlı bir sis giderme modülüdür. Ana algılayıcı görüntüye bakmadan önce FFA-Net, hem kanal düzeyinde bilgiyi hem de bireysel pikselleri dikkate alarak kontrastı iyileştirir ve kaybolmuş ayrıntıları geri kazandırır. Etkide, sis temizlenir ve sonraki ağın üzerinde çalışacağı veriler daha keskin hale gelir. Ardından özellik çıkarımı için yeniden tasarlanmış bir "omurga" olan PGIG-Backbone gelir. Bu yapı, bilginin nasıl aktığını ve ağın iç sinyallerinin nasıl güncellendiğini yönlendirir. Bu gradyanları dikkatle yönetip çoklu yollardan gelen sinyalleri birleştirerek, standart tasarımların göz ardı etmeye meyilli olduğu küçük, düşük çözünürlüklü gemi hedeflerini daha iyi temsil edebilir hale gelir.

Ağın Odaklanmasına ve Daha İyi Değerlendirme Yapmasına İzin Vermek
Daha temiz görüntüler ve daha güçlü bir omurganın ötesinde, PEW_YOLOv8 ağın ortasında verimli bir çok ölçekli dikkat modülü ekler. Bu bileşen, özellik haritalarının farklı bölgelerini ve katmanlarını ağırlıklandırarak gemiye benzeyen desenleri güçlendirir ve dalgalar veya iskeleler gibi arka plan karmaşasını azaltır. Son olarak, yazarlar sınırlayıcı kutuları puanlama konusundaki alışılmış yöntemi Wise-IoU v3 adlı bir yöntemle değiştirir. Bu kayıp fonksiyonu, birkaç problemli örneğin aşırı etkisinde kalmak yerine çeşitli durumlardan ne kadar güçlü öğrenileceğini ayarlayarak örtüşen gemiler ve belirsiz sınırlarla başa çıkmaya yardımcı olur, sistemin kararsızlaşmasını önler.
Testler Ne Gösteriyor
Araştırma ekibi yöntemlerini, açık deniz, limanlar ve kıyı suları dahil gerçek sahil savunma sahnelerinden alınan 9.400 görüntü içeren endüstriyel bir kızılötesi gemi veri setinde değerlendiriyor; veri setinde kano benzeri küçük teknelerden büyük konteyner gemilerine kadar yedi tür gemi bulunuyor. PEW_YOLOv8’i orijinal YOLOv8 ve birkaç popüler algılayıcıyla karşılaştırıyorlar. Eklenen her modül—sis giderme, geliştirilmiş omurga, dikkat mekanizması ve yeni kayıp fonksiyonu—ölçülebilir bir doğruluk artışı sağlıyor. Birleştirildiklerinde bu değişiklikler ana tespit skorunu yüzde 92,2’ye çıkarıyor; bu, temel YOLOv8’e göre neredeyse dört yüzde puanlık bir iyileşme anlamına geliyor ve işlem hızını gerçek zamanlı izleme için uygun tutuyor.
Açık Denizde Daha Net Uyarılar
Basitçe söylemek gerekirse, bu çalışma özenle uyarlanmış yükseltmelerin gürültülü kızılötesi gemi görüntülerini çok daha güvenilir otomatik uyarılara dönüştürebileceğini gösteriyor. Önce görüntüyü temizleyip, ardından daha zengin ayrıntılar çıkarıp, olası gemi bölgelerine odaklanıp ve örtüşen hedefler hakkında daha akıllıca kararlar vererek PEW_YOLOv8, önceki sistemlere göre daha fazla gemi görür ve daha az hata yapar. Çok kalabalık sahneler için daha fazla iyileştirme ve daha hızlı işlem ile bu tür yaklaşımlar, özellikle insan gözü ve geleneksel kameraların en çok başarısız olduğu gece ve kötü hava koşullarında deniz trafiğini daha güvenli hale getirmeye yardımcı olabilir.
Atıf: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Anahtar kelimeler: kızılötesi gemi tespiti, deniz gözetimi, nesne tespiti, derin öğrenme, YOLOv8